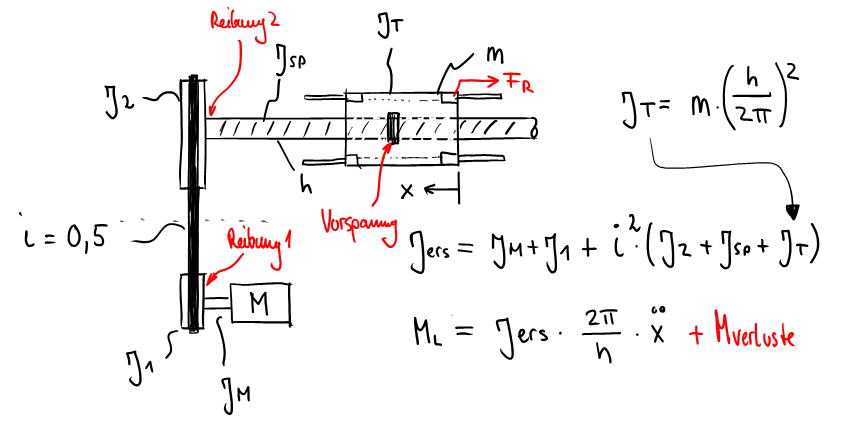
Ich möchte einen Antrieb (DC Motor) auslegen der einen Riementrieb mit 0,5 Übersetzungsverhältnis und dann ein Kugelgewindetrieb antreibt. Was ich nicht verstehe: Das Übersetzungsverhältnis geht doch quadratisch ein. Also alles was "hinter" dem Riementrieb kommt, wird mit i² verringert. Angenommen das Trägheitsmoment von Motor und Antriebsrad ist vernachlässigbar klein, dann reduziert sich das benötigte Moment doch von Beispielsweise 1 Nm auf 0,25 Nm ?! Die Drehzahl aber wird sich ja nur verdoppeln... Nun ist das aber doch widersprüchlich mit der Gleichung P=M*n/9550 Würde ja heißen, ich brauche unterm strich weniger Leistung !? Was übersehe ich?
Angehängte Dateien:
-

Unbenannt.png
39 KB
:
Bearbeitet durch User
Quadrat gilt für trägheitsmomente. M, n sind linear.
Aber M ist doch = J * alpha und wenn J mit i² multipliziert wird, dann steigt bzw. sinkt M auch um den Faktor i² ?? Irgendwie habe ich einen Denkfehler edit: kann es wegen der Beschleunigung sein? Ich will die Last mit 0,5 m/s² beschleunigen. Wenn ich jetzt die 1:2 Untersetzung dazwischen habe muss der Motor nicht mehr mit 0,5 m/s² (also umgerechnet auf "alpha" natürlich) beschleunigen, sondern mit 1 m/s² also Faktor 2 schneller. Dann würde es ja wieder passen und Weil J/4 und alpha*2 ergibt M/2
:
Bearbeitet durch User
Wo ist das Problem: Rad mit halbem Durchmesser. Also doppelte Drehzahl, da Umfang nur halb so groß Rad mit halbem Radius, also halbes Drehmoment, da Hebelachse halb so lang, Die Kraft wird ja vom Riemen 1:1 übertragen. Nicht stupide irgendwann mal dreiviertel gelernte und wieder halb vergessene Formeln hinschreiben, sondern seinen Grips benutzen.
Ja das ist richtig. Deine leistung zum beschleunigen sinkt. Dafür dreht es ja auch nur halb so schnell. =>Du musst den motor doppelt so stark beschleunigen. (Das reali i ist eben doch nicht 0). Wenn du das wirklich verstehen willst: Nimm einen motor mit m nenn und einem i und eine sollgeschwindigkeit der spindel und suche die optimale Übersetzung.
Ein als ideal angenommenes Getriebe mit einer Untersetzung von 2:1 verhält sich im Grunde genommen sehr einfach: 1) Die Energie bleibt gleich 2) Die Kraft verdoppelt sich 3) Die Geschwindigkeit halbiert sich Ich bin mir aber sicher, dass Dir diese Aussage überhaupt nichts nutzt. Vor allem, da ja alle wichtigen Parameter unter dem Tisch herum liegen.
habe den Denkfehler ja gefunden. Schlichtweg vergessen, dass ja auf der Motorseite doppelt so schnell beschleunigt werden muss. Das i² hatte mich nur verwirrt.
>Die Kraft wird ja vom Riemen 1:1 übertragen. Das ist der Grund weshalb ich von einem idealen Getriebe gesprochen habe. Sonst stimmt es nämlich nicht - nicht mal annähernd. >Schlichtweg vergessen, dass ja auf der >Motorseite doppelt so schnell beschleunigt werden muss. Vorsicht, dass Dir die Motormasse (Rotor) nicht das Spiel verdirbt. Auf dem Blatt Papier ist der Faktor 2 schnell erreicht.
Nur so am Rande: Das Übersetzungsverhältnis i deines Riemengetriebes ist nicht 0,5, sondern 2 (Antriebsdrehzahl geteilt durch Abtriebsdrehzahl).
Yalu X. schrieb: > Nur so am Rande: Das Übersetzungsverhältnis i deines Riemengetriebes ist > nicht 0,5, sondern 2 (Antriebsdrehzahl geteilt durch Abtriebsdrehzahl). Wäre meine erste Anmerkung gewesen. Meine 2te: Clemens S. schrieb: > Ja das ist richtig. Deine leistung zum beschleunigen sinkt. Dafür dreht > es ja auch nur halb so schnell. Das ist so auch nicht ganz richtig. Die Leistung die zur Verfügung steht, bleibt bei idealem Getriebe vorausgesetzt gleich. Du hast nun die doppelte Kraft, d.h du beschleunigst mit der selben Leistung doppelt so schnell (a=f*m), kannst aber nur noch die halbe Geschwindigkeit erreichen. D.h. bei gleicher Leistung beschleunigst du in 1/4 der Zeit auf die 1/2 Geschwindigkeit des 1:1 übersetzten Falles.
nunja, das macht jeder "wie er will" entweder teil ich durch i² oder ich multipliziere ... aber gängiger ist eigentlich immer ausgang/abtrieb zu eingang/antrieb
P.S. mein letztes Post bedarf natürlich auch noch eines idealen Motors, sprich drehzahlkonstantes Drehmoment. Aber wenn man nen hoffnungslos überdimensionierten E-Motor (größtes Drehmoment bei Stillstand?) nimmt, sollte das in seinem unteren Drehzahlbereich doch in erster Näherung ganz gut hinkommen?
Anonymus_bugmenot A. schrieb: > Würde ja heißen, ich brauche unterm strich weniger Leistung !? Du hast das Perpetuum Mobile erfunden, schalte noch ein paar Riemenantriebe dahinter. Irgendwas muss wohl falsch sein....
Ein Schrittmotor z.b hat ab Drehzahl null konstant hohes Drehmoment. Ab einer gewissen Drehzahl fällt dieses dann ab.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.