Hallo,
Ich versuche mit einem Attiny-85 in Verbindung mit einem L200 eine Art
überwachtes Netzteil zu realiiseren.
Den jeweiligen Betriebszustand soll der MC über eine LED-Ampel anzeigen.
Um den Zustand festzustellen werden zwei Analog-Digital wandlungen im
Wechsel durchgeführt.
Die Ausgangsspannung wird über eine normale Messung realisiert.
Der Strom wird über eine Shuntwiderstand ermittelt, mit einer
Differenzmessung und einem Gain von 20.
Das Problem:
Wenn ich im Quellcode den Funktionsaufruf einer der beiden Messungen
auskommentiere klappt das Wunderbar. Die Genauigkeit ist sehr gut.
ABER beide im Wechsel geht nicht...
Hatte vielleicht jemand ein ähliches Problem oder kann sich da einen
Reim draus machen?
Mfg
Wandlungsdauer beachtet?
Schaltest du die Ports während der Wandlung um, kann das auch in die
Hose gehen.
Also Timing beachten und ggf den Abschnitt ADC im Datenblatt nochmal
lesen.
Hallo Walter H.,
was Dennis K. unter anderem meint, ist , dass die ADC-Eingänge
niederohmig betrieben werden sollen.
Das kann man über jeweils einen OPV a=1 erreichen.
Die Shunt-Spannungsmessung würde ich immer über einen differenziellen
OPV realisieren.
Siehe AN105 - Current Sense Circuit Collection
# http://cds.linear.com/docs/en/application-note/an105fa.pdf
Ich verwende den LT1637 zur High-Side Strommessung, mit einem
4-Leiter-Shunt 1mOhm und a=100. Es entsteht dadurch eine Offsetfehler,
den man einfach korrigieren kann.
# http://cds.linear.com/docs/en/datasheet/1637fd.pdf
Walter H. schrieb:> Der Strom wird über eine Shuntwiderstand ermittelt, mit einer> Differenzmessung und einem Gain von 20.
Den ersten Wert nach dem Umschalten in den "Gain"-Modus solltest du
verwerfen, also zwei mal hintereinander messen. Steht glaub ich auch im
Manual.
Hallo,
erstmal danke für die Anregungen.
Die Bauteile stehen fest, da es sich um eine Arbeit für die Uni handelt.
Wäre super wenn sich das jemand angucken könnte.
Hier der Quellcode:
Hallo Walter,
hast Du AP von Atmel für dem AVR gelesen und umgesetzt ?
AVR120: Characterization and Calibration of the
ADC on an AVR
AVR121: Enhancing ADC resolution by
oversampling
Ich verwende immer 2^n; n E {4,..,64} ADC-Messungen am Stück und bilde
dann den Mittelwert über alle Messergebnisse.
------------------------------------------------------------
Zu deinem Programm Code, sollte man nicht als erstes den ADC
initialiseren.
Ich bevorzuge die Bit-Nummer, um Probleme zu vermeiden und es dem Leser
einfacher zu machen.
Bsp.:
1
ADCSRA|=(1<<ADEN);
Der Attiny85 hat folgende Register, die man alle kennen sollte:
ADMUX – ADC Multiplexer Selection Register
REFS1 REFS0 ADLAR REFS2 MUX3 MUX2 MUX1 MUX0
Du schreibst nichts in die Bits REFS[2:0] somit wird
VCC used as Voltage Reference, disconnected from PB0 (AREF) verwendet.
Sehr ungünstig !
ADCSRA – ADC Control and Status Register A
ADEN ADSC ADATE ADIF ADIE ADPS2 ADPS1 ADPS0
Wichtig sind hier u.a.:
ADCSRA.ADEN = 1
ADCSRA.ADATE = 0
ADCSRA.ADIE = 0
ADCSRA.ADPS[2:0] := 50kHz <= ADC-Takt <= 200kHz hier muss man lesen und
rechnen.
ADCSRA.ADSC = 1 für den Start einer ADC-Wandlung.
ADCSRB – ADC Control and Status Register B
BIN ACME IPR – – ADTS2 ADTS1 ADTS0
ADCSRB.ADTS[2:0] = 000
Das ist evtl. für Dich wichtig ?
Bit 7 – BIN: Bipolar Input Mode
The gain stage is working in the unipolar mode as default, but the
bipolar mode can be selected by writing the BIN bit in the ADCSRB
register.
In the unipolar mode only one-sided conversions are supported and the
voltage on the positive input must always be larger than the voltage on
the negative input.
Otherwise the result is saturated to the voltage reference.
In the bipolar mode two-sided conversions are supported and the result
is represented in the two’s complement form. In the unipolar mode the
resolution is 10 bits and the bipolar mode the resolution is 9 bits
+ 1 sign bit.
DIDR0 – Digital Input Disable Register 0
– – ADC0D ADC2D ADC3D ADC1D AIN1D AIN0D
Hier sollte man schon die verwendeten und seine analogen Eingänge
eintragen !
------------------------------------------------------------
Wenn mann dann eine Dummy ADC-Wandlung macht
1
ADCSRA|=(1<<ADSC)|(1<<ADEN);
2
while(ADCSRA&(1<<ADSC));
dann muss man auch zwingend den ADC-Wert lesen !
Steht auch alles im Datenblatt.
Noch schlimmer ist es, wenn man seine Ports nicht richtig setzt:
1
DDRB=0xff;
2
PORTB=0xff;
Schon mal im Datenblatt nachgesehen was dass bedeutet ?
Vielleicht vorweg...
Das ist mein erstes eigenes Projekt. Daher bitte ich um ein bischen
Nachsicht und Hilfe :)
Doch die Funktionsaufrufe stimmen. Ich habe es in der Eile falsch hier
reinkopiert, weil ich noch einiges auskommentiertes rausgelöscht habe.
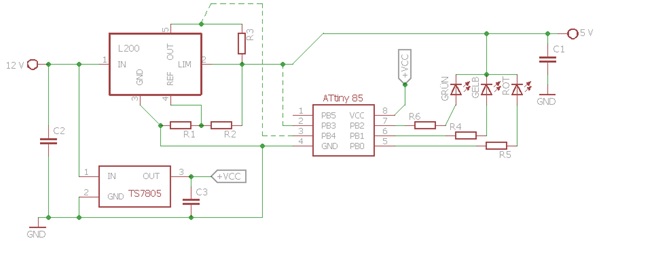
Hier der Schaltplan:
Walter H. schrieb:> Doch die Funktionsaufrufe stimmen. Ich habe es in der Eile falsche hier> reinkopiert, weil ich noch einiges auskommentiertes rausgelöscht habe.
Dadurch, dass du anderen COde rauslöscht werden aber korrekte
Funktionsaufrufe nicht illegal.
Im übrigen machst du dir hier keine Freunde, wenn du nicht exakt den
Code postest, der dann auch tatsächlich genau so auf deinem µC läuft.
Denn ganz offensichtlich hast du deine verkürzte Version nicht getestet,
ob sie das von dir 'in der Langversion' beobachtete Verhalten immer noch
aufweist.
DU brauchst Hilfe, nicht wir. Dann schmeiss uns auch keine Prügel
zwischen die Beine.
Nun ja,
Ich würde an der Uni kein Projekt machen, von dem ich 0 Ahnung habe.
Selbst der Schaltplan enthält Fehler und so kann die Schaltung nicht
funktionieren. Stichwort LED.
Der Attiny85 benötigt einen 100nF Kondensator direkt an Vcc - Gnd.
Zu Messen (ADC), dass kann man nur, wenn man eine saubere
Referenzspannung hat, sonst bleiben nur Tendenzen übrig.
Die Spannungsregler benötigen jeweils ihre eigene Filterung an ihren
Ein- und Ausgängen. Wie steht in deren Datenblättern.
den Default Prescaler von 2 zu benutzen ist nicht gerade schlau.
So wie das aussieht, wird dein Tiny mit 1Mhz getaktet (default
RC-Oszillator). Mit einem Prescaler von 2 hast du damit eine ADC
Taktfrequenz von 500kHz. Da leidet die Genauigkeit dann schon sehr.
Atmel empfiehlt einen Bereich von 50kHz bis maximal 200kHz. Mit den
500kHz bist da da schon einiges über das Ziel hinausgeschossen.
Edit: und ich könnte mir durchaus vorstellen, dass da nich nur die
Genauigkeit drunter leidet, sondern dass die ADC internen Vorgänge
dadurch ganz einfach viel zu schnell ablaufen, damit der ADC korrekt auf
die jeweiligen Eingänge geschaltet werden bzw. sich die Sample & Hold
Stufen auf die jeweiligen Spannungen umladen können.