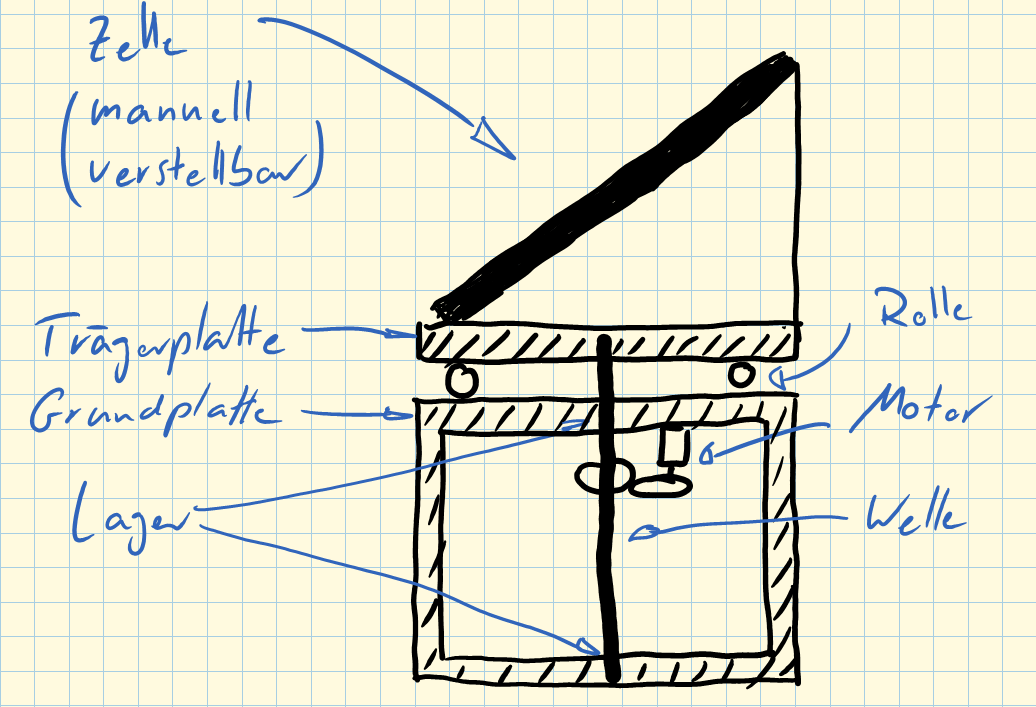
Hallo liebe Gemeinde, ich hänge seit mehreren Wochen an einem Projekt fest, wo mir eine Sache wirklich Schwierigkeiten bereitet. Ohne jetzt auf jedes Detail einzugehen, handelt es sich hier um die Problematik das sich hier ein System selbstständig mit Solarenergie versorgen soll, zur Optimierung soll das Modul der Sonne nachgeführt werden. Ich bin von der viel verwendeten Idee ab, dies mit LDR´s zu realisieren, da mir das schlicht und einfach als zu störanfällig erscheint. Es soll mittels Arduino Uno R3 der Sonnenstand berechnet und dafür NUR Horizontal Nachgeführt werden. Für den Abgleich wird ein DS3231 für den Zeitabgleich und ein Gy 273 Kompass als Bezugspunkt verwendet. Längen und Breitengrad werden fest einprogrammiert. Der Arduino muss nebenbei einige Messwerte verarbeiten und ausgeben, deren Energiebilanz ich noch nicht aufstellen konnte. Das Panel ist ein 12V/5Wp und speißt einen 12V 7,2Ah Bleiakku. Dazwischen hängt ein Laderegler von dem ich mir 12V abzwacken kann. Mein Problem liegt nun in der Wahl des Aktors für die Nachführung. Ich habe sehr viel gelesen und rumprobiert und kann mich nicht entscheiden ob ich Servo, Getriebemotor oder Schrittmotor verwenden soll und wie ich die Steuerung realisiere. Der Servo fällt in meinen Augen wegen dem Haltestrom und somit wegen Energiebilanz raus. Getriebemotor hat den Vorteil das die Programmierung recht simpel ausfällt, da sich hier die Nachführung auf "drehe solange bis Wert des Kompass erreicht ist" beschränkt. Beim Schrittmotor wäre die Möglichkeit immer dann drehen zu lassen wenn ein Winkel der zum Schrittmotor passt erreicht wird, bsp wenn 18 Grad Verschiebung ist, drehe 10 Schritte. Natürlich müsste ich dem Schrittmotor den Saft abdrehen, da mit der Haltestrom glaub ich ziemlich schnell den Akku leeren würde. Was noch wichtig ist, es muss nicht permanent nachgedreht werden, sondern Sinngemäß. Zelle samt Trägerplatte hat etwa ein Gewicht von 1,5Kg und (Zentrisch angetrieben) einen Durchmesser von etwa 30cm, da es hier nun wirklich nicht um Geschwindigkeit geht (eig. würde 1 rpm reichen) bin ich etwas ratlos welches nm der Motor min. haben muss. Für etwas Stabilität, liegt die Trägerplatte außerdem mittels zwei Rollen auf der Grundplatte darunter auf und ich denke es ist Sinnvoll den Motor nicht direkt sondern mit 1:1 oder geg. Untersetzung an die Welle zu hängen um der Welle des Motors nicht zu schaden. Beim errechnen bin ich auf etwa 1/2nm gekommen, weiss aber leider nicht ob das ein plausibler Wert ist. Auf einen fertigen Motortreiber muss ich zudem verzichten weil diese Module zu teuer sind und ich nur Deutsche Händler mit Rechnungsstellung nutzen darf. Von daher muss ein L293, 298 oder so her was natürlich vom Motor dann abhängig ist. Wie man merkt bin ich kein Fachmann aber lerne gerne bei solchen Projekten und hoffe mich kann jemand an seinen Erfahrungswerten teilhaben lassen. Ich bin für jeden Tipp dankbar. Gerne auch Links zu Produkten oder Infos die mich weiter bringen. Ps: Bitte nicht über diese tolle Handzeichnung lachen!
Angehängte Dateien:
-

Unbenannt.PNG
93 KB
ich würde als treiber einen tb6550 für ca. 15 Euro nehmen: http://www.ebay.de/itm/CNC-Router-Single-Axis-3A-TB6560-Stepper-Motor-Driver-Board-4-axiscontrol-DEShip-/221482836936?hash=item339167e3c8:g:9rcAAOxy3NBSef3x übersetzter antrieb über zahnriemen dann reicht ein nema17 schrittmotor den brauchst du ja immer nur einschalten wenn gedreht werden soll für die sonnenstandsberechnung einfach mal googlen, da findest du die passende formel ich wünsche dir noch viel erfolg bei deinem vorhaben
Habe die ziemlich ausgiebige Frage mal nur überflogen: Den Trick mit den zwei kleinen Solarzellen und dem Glockenankermotor kennst du? Das braucht GAR KEINE Regelung, wäre in 10 Minuten selbst gebaut.
Ist das Ganze akademisch oder soll es tatsächlich genutzt werden? Mein erster Rat wäre: nimm 2 Module. Eins fest nach SO, das andere SW und verstrick die intelligent. Die Nachführerei lohnt sich nicht wirklich. Das Ganze ist mech. aufwendig und anfällig, die Steuerung und der Motor verbrauchen auch wieder Strom. Bleiakku wäre für mich nicht unbedingt die erste Wahl, wenn es darum geht, jede mWh auch zu nutzen.
H.Joachim S. schrieb: > Ist das Ganze akademisch oder soll es tatsächlich genutzt werden? > > Mein erster Rat wäre: nimm 2 Module. Eins fest nach SO, das andere SW > und verstrick die intelligent. Die Nachführerei lohnt sich nicht > wirklich. Das Ganze ist mech. aufwendig und anfällig, die Steuerung und > der Motor verbrauchen auch wieder Strom. Bleiakku wäre für mich nicht > unbedingt die erste Wahl, wenn es darum geht, jede mWh auch zu nutzen. Vielen Dank für die Antworten :), ich fange mal hier an. Ja es handelt sich um ein Studienprojekt und die Zelle/Akku/Laderegler/Arduino sind Vorgabe. Da das Budget sehr knapp ist fällt leider die Möglichkeit weg ein zweites Modul zu verwenden. Das die Nachführung nicht lohnt, sehe ich genauso nur ist dies leider Aufgabe. Funktionieren muss es schon, dennoch wird nicht erwartet das alles Marktreif erarbeitet ist. Bastler schrieb: > ich würde als treiber einen tb6550 für ca. 15 Euro nehmen: > Ebay-Artikel Nr. 221482836936 > übersetzter antrieb über zahnriemen dann reicht ein nema17 schrittmotor > den brauchst du ja immer nur einschalten wenn gedreht werden soll für > die sonnenstandsberechnung einfach mal googlen, da findest du die > passende formel ich wünsche dir noch viel erfolg bei deinem vorhaben Also die Sonnenstandsberechnung, Kompass und Uhr steht soweit es ist wirklich die Problematik einen geeigneten Motor mit Ic zu bestellen, welcher dann funktionieren muss. Das mit dem Zahnriemen habe ich auch schon überlegt. Ist das einer Zahnradübersetzung vorzuziehen? Und wäre es dann nicht besser einen Getriebemotor zu nehmen, weil das mit dem Schritt dann eh nicht mehr klappt? Uwe S. schrieb: > Den Trick mit den zwei kleinen Solarzellen und dem Glockenankermotor > kennst du? Das braucht GAR KEINE Regelung, wäre in 10 Minuten selbst > gebaut. Nein, den Trick kannte ich nicht. Ein wirklich interessanter Ansatz, jedoch kommt das nicht dem Prinzip der LDR´s ziemlich gleich? Also ich erkläre die Problematik nochmal kurz. Ich brauche einen geeigneten Getriebe oder Schrittmotor (entscheidet natürlich über die Programmierung) um diese 1,5Kg alle paar Minuten ein Stück zu bewegen und konnte bisher keinen günstigen Motor finden, dessen max. Strom zu einem Treiber IC passt ohne diesem zu schaden. Da ich nur deutsche Händler mit Rechnung nutzen kann muss ich auf das teure C oder ähnliche die man so kennt zurückgreifen. Liebe Grüße
wenn geschwindigkeit wurst ist (fast): irgendeinen billigen getriebemotor nehmen der schön großzügig übersetzt und die messung der position an einen optischen Streifen delegieren. Motor dreht halt dann immer solange bis der nächste Streifen oder eben auch nicht erreicht ist. Billig.
Fabian S. schrieb: > Nein, den Trick kannte ich nicht. Du nimmst zwei kleine Zellen (z.B. 0,5W), ordnest sie nebeneinander an, aber in leichter Pfeilstellung, z.B. 45° aus der Flucht. Dieser "Pfeil" zeigt natürlich in die Richtung, wohin auch das Modul später "sehen" soll, und er kommt z.B. ganz oben mit an die eigentliche Solarzelle. Jetzt schaltest du beide kleine Zellen antiparallel, und hängst den Motor mit geringstem Leerlaufstromverbrauch dran, den du nur finden kannst (Faulhaber, Maxon, Escap mit Edelmetallbürsten). Scheint nun die Sonne morgens auf z.B. die linke Zelle, so erzeugt (fast) nur sie eine Spannung, die das Modul dann in diese Richtung bewegt. Das passiert so lange, bis die zweite kleine Zelle genau so viel Licht abbekommt. Dann beträgt die Spannung an beiden Zellen 0V, der Motor bleibt stehen. Mit Dioden und antiseriell geschalteten Zellen kann das Ganze noch etwas besser funktionieren, je nach Motor- und Zellentyp. Selbstverständlich darfst du diese "Idee" nicht kommerziell anwenden, da ist sicherlich ein Patent drauf. Der Getriebemotor sollte natürlich entsprechend viele Getriebestufen bekommen. Da die Sonne sehr langsam wandert, kann man nach oben hin fast nichts verkehrt machen. Außer morgens oder nach Stunden des Sauwetters kann es ggf. halt mal etwas dauern. Fabian S. schrieb: > kommt das nicht dem Prinzip der LDR´s ziemlich gleich? Damit könntest du natürlich leicht auch einen stärkeren, schnelleren Antrieb bauen. Einfacher würde es aber wohl ganz und gar nicht.
mallorcatourist schrieb: > wenn geschwindigkeit wurst ist (fast): irgendeinen billigen > getriebemotor nehmen der schön großzügig übersetzt und die messung der > position an einen optischen Streifen delegieren. Motor dreht halt dann > immer solange bis der nächste Streifen oder eben auch nicht erreicht > ist. > Billig. ja genau so einen Motor(und einen geeigneten IC) suche ich! Mit den Streifen ist gar nicht nötig, da die Positionierung schon mit einem Kompass realisiert wurde. An Uwe S.: Vielen Dank für die gute Beschreibung. Um ein Patent muss ich mir zum Glück keine Sorgen machen, da es sich nur um die Entwicklung eines Prototypen handelt. Mit dem Vergleich zu LDR´s war gemeint, dass ich Sorge hatte das dies zwar bei Sonnenschein gut funktioniert, jedoch bei Bewölkung die Streuung so stark ist das die LDR´s nicht zuverlässig sind und der Motor unnötig oder gar nicht nachjustiert. Dies wäre bei diesem Prinzip zwar nicht schlimm weil ja der Akku nicht belastet wird, aber dennoch die Gefahr besteht das die Sonne nicht zu finden ist. Wir sind das einzige Team das es mittels Sonnenstandberechnung realisiert und haben sehr gute Resonanz dies bezüglich bekommen und somit würde ich diesen Ansatz auch gerne weiter verfolgen.
Schau mal beim Schrotthändler (Pollin) vorbei, der hat manchmal ganz brauchbare Getriebemotoren.
Fabian S. schrieb: > die Gefahr besteht das die Sonne nicht zu finden ist. Das hängt beim genannten Prinzip nur davon ab, wie hoch die Übersetzung gewählt ist, bzw. wie hochwertig die Komponenten sind. Das Einzige was man da noch "berechnen" müsste, wäre die Rückwärtsfahrt über Nacht. Wenn es bei Bewölkung keine Helligkeitsunterschiede gibt, bringt es auch nichts, die Zelle nach der errechneten Sonne auszurichten. Fabian S. schrieb: > ich hänge seit mehreren Wochen an einem Projekt fest, wo mir eine Sache > wirklich Schwierigkeiten bereitet. Falls das andauern sollte, denk nochmal drüber nach ;-) Auch über Stromverbrauch, Zuverlässigkeit u.Ä.. Die Mechanik solltet ihr so verändern, daß die oben gezeigten Rollen weg kommen, und stattdessen eine starke Welle in entsprechenden Lagern gelagert wird. Wäre viel zuverlässiger, hätte weniger Reibung.
Uwe S. schrieb: > Die Mechanik solltet ihr so verändern, daß die oben gezeigten Rollen weg > kommen, und stattdessen eine starke Welle in entsprechenden Lagern > gelagert wird. Wäre viel zuverlässiger, hätte weniger Reibung. Oder den Bock zum Gärtner machen, und eine der Rollen antreiben.
Jep, aber unten ein Lager, was auch axiale Kräfte aufnehmen kann. Kegelrollenlager wäre mein Mittel der Wahl. Ansonsten - ich halte die Steuerung über die Uhrzeit für die bessere Wahl statt zusätzlichem Lichtsensor.
H.Joachim S. schrieb: > Schau mal beim Schrotthändler (Pollin) vorbei, der hat manchmal ganz > brauchbare Getriebemotoren. Ja Pollin ist klasse, da habe ich schon viel gefunden nur leider kann man dort nicht auf Rechnung bestellen.... Uwe S. schrieb: > Wenn es bei Bewölkung keine Helligkeitsunterschiede gibt, bringt es auch > nichts, die Zelle nach der errechneten Sonne auszurichten. Das führte zu der Idee der Berechnung, weil hier wenn alles läuft und der Gesamtverbrauch gemessen wird, entschieden werden kann wie oft man nachführt bzw testen wie oft es sich "lohnt". Wir müssen eine Poly. Zelle verwenden, was ich auch nicht ideal finde. Mit freier Wahl hätte ich mich für eine Amorphe ohne Nachführung entschieden. > Falls das andauern sollte, denk nochmal drüber nach ;-) > Auch über Stromverbrauch, Zuverlässigkeit u.Ä.. Hehe, ja das tue ich, leider bin ich da an die Vorgaben gebunden und das Projekt ist schon so weit das sich nichts grundlegend mehr verändern lässt. > Die Mechanik solltet ihr so verändern, daß die oben gezeigten Rollen weg > kommen, und stattdessen eine starke Welle in entsprechenden Lagern > gelagert wird. Wäre viel zuverlässiger, hätte weniger Reibung. Das sehe ich genauso, leider wurde ich da im Team überstimmt.
Ulrich F. schrieb: > Oder den Bock zum Gärtner machen, und eine der Rollen antreiben. Nöö, wäre noch etwas anfälliger. Die hohe Reibung bliebe, da kann immer noch jede Menge Dreck rein kommen, und zudem könnte die Rolle durchdrehen. Rollen gehen in dem Zusammenhang aber sowieso nicht, es sei denn, er nutzt Kegelrollen. Etwas utopisch bei der Größe...
H.Joachim S. schrieb: > Jep, aber unten ein Lager, was auch axiale Kräfte aufnehmen kann. > Kegelrollenlager wäre mein Mittel der Wahl. Ich wollte da gewöhnliche Inliner Kugellager nehmen, die ich hier rumliegen habe, da die ja schon etwas Axiale Last abkönnen und es ja nur 730 Umdrehungen im Jahr sind :D. Das muss natürlich Argumentiert werden. Ulrich F. schrieb: >> Oder den Bock zum Gärtner machen, und eine der Rollen antreiben. > Nöö, wäre noch etwas anfälliger. Die hohe Reibung bliebe, da kann immer > noch jede Menge Dreck rein kommen, und zudem könnte die Rolle > durchdrehen. > Rollen gehen in dem Zusammenhang aber sowieso nicht, es sei denn, er > nutzt Kegelrollen. Etwas utopisch bei der Größe... Ja die Rollen sind nur als Unterstützung gedacht, Bspw. bei einem Windstoß, dass die Welle nicht zu viel abbekommt. Als Welle soll eine Gewindestange dienen, wo die Lager mit Muttern gekontert festgesetzt werden. Da es ja keine hohe Drehzahl gibt klappt das in meinen Augen.
Fabian S. schrieb: > Ja die Rollen sind nur als Unterstützung gedacht, Bspw. bei einem > Windstoß, dass die Welle nicht zu viel abbekommt. Problem bliebe halt, daß das ein großes offenes Lager wäre. Da kann alles zwischengeraten, Laub, Insekten, Vogelnester, Meteoriten...;-)
Auf genau diese Art hat mein Schwiegervater mal versucht, eine Drehscheibe für die Garteneisenbehn zu bauen (also mit den offen liegenden Kugeln), hat nie längere Zeit funktioniert.
Angehängte Dateien:
-

img020.jpg
240 KB -

img021.jpg
240 KB
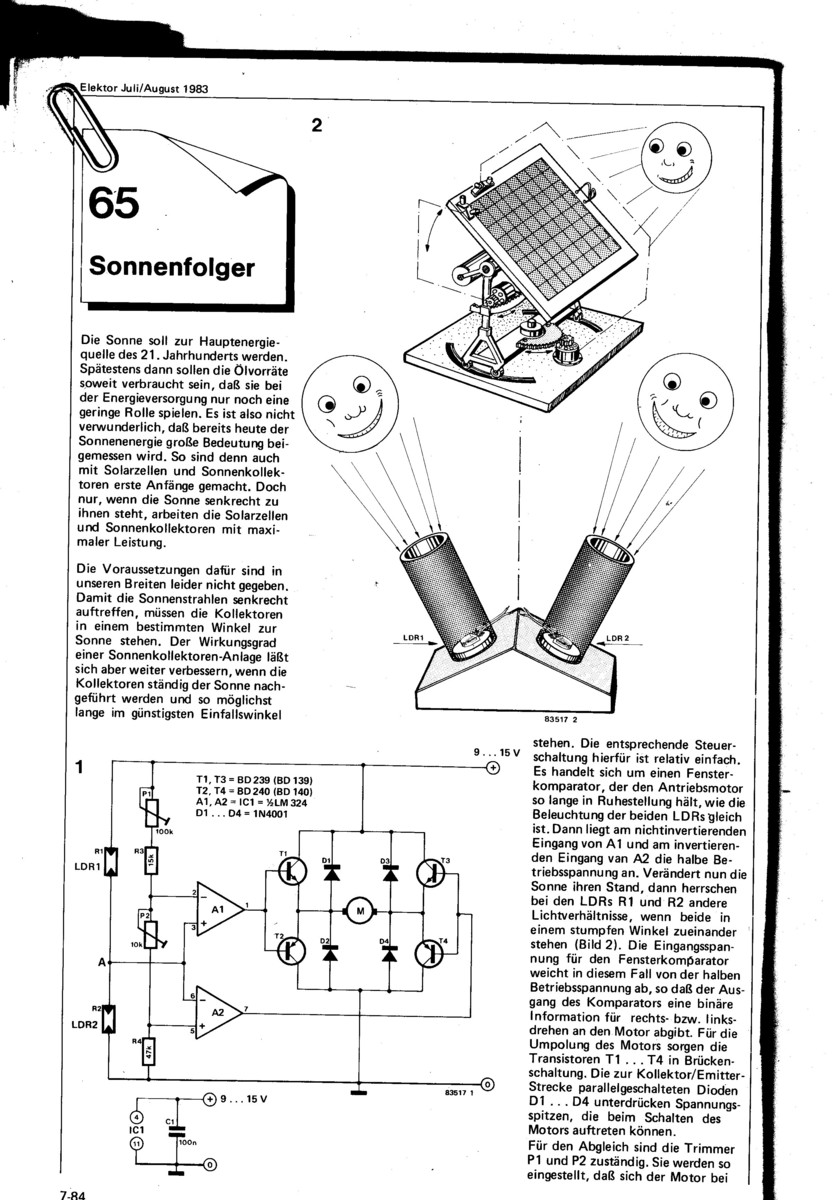
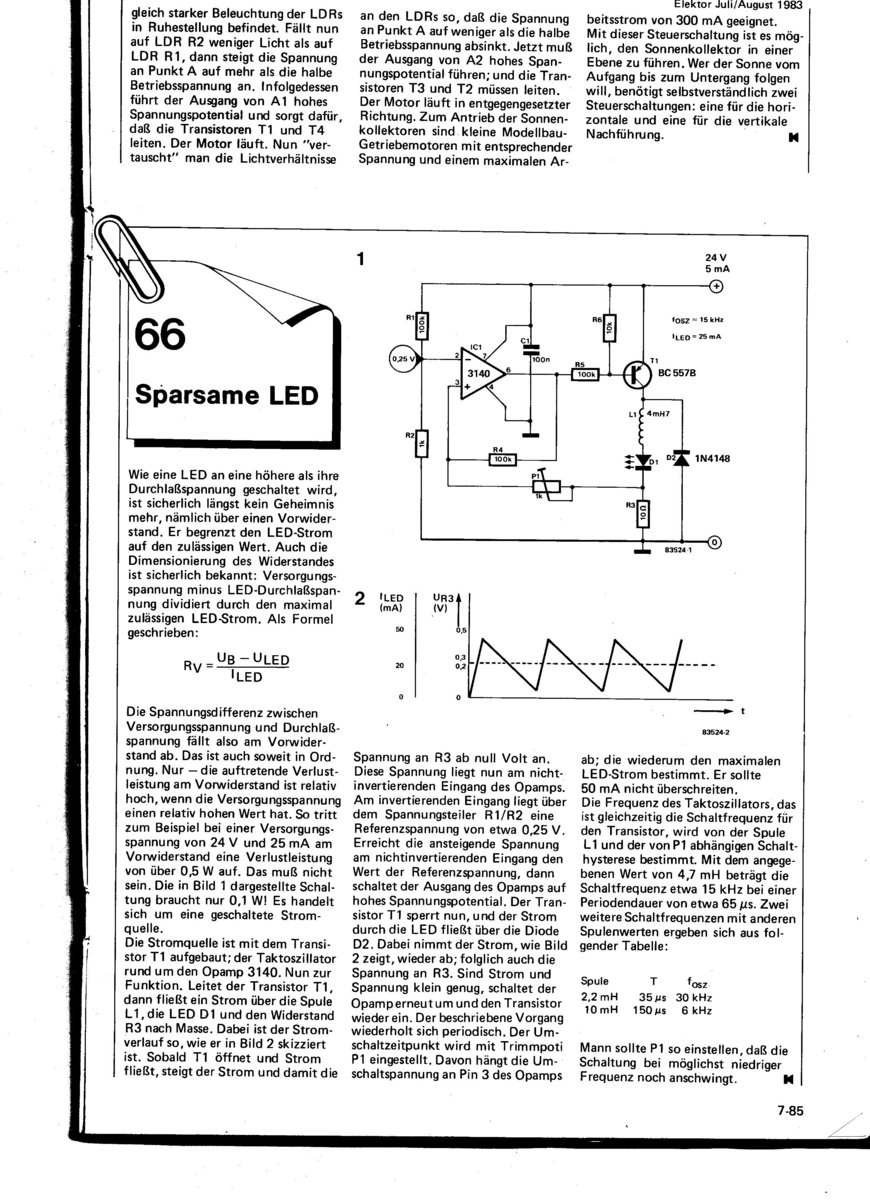
Hier eine rein analoge Version und mit einfachen Mitteln herzustellen....
Fabian S. schrieb: > Gerne auch Links zu Produkten oder Infos die mich weiter bringen. Hast du schon mal über einen (DISEQC-) SAT Stellantrieb nachgedacht, ob der deine Anforderungen erfüllen kann? Die Dinger gibts für 50 EUR wetterfest, und unproblematisch in der Handhabung. Mit ein paar gecshickten Rechenformeln kannst du die Schüssel minutengenau ausrichten
Uwe S. schrieb: > Problem bliebe halt, daß das ein großes offenes Lager wäre. Da kann > alles zwischengeraten, Laub, Insekten, Vogelnester, Meteoriten...;-) Haha, ja wenn man es genau nimmt muss man als Dissipation auch Meteoriten-Schauer hinzuziehen, sehr gut. H.Joachim Seifert: > Auf genau diese Art hat mein Schwiegervater mal versucht, eine > Drehscheibe für die Garteneisenbehn zu bauen (also mit den offen > liegenden Kugeln), hat nie längere Zeit funktioniert. Also die Lager wären so verbaut das sie in dem Gehäuse liegen wo auch Arduino und Co untergebracht sind. Und die Rollen selber, bzw die ganze Trägerplatte kann nachher so verblendet werden das außer vielleicht einer Spinne da nix zwischen kommt. Wegstaben Verbuchsler schrieb: > Hast du schon mal über einen (DISEQC-) SAT Stellantrieb nachgedacht, ob > der deine Anforderungen erfüllen kann? Die Dinger gibts für 50 EUR > wetterfest, und unproblematisch in der Handhabung. Mit ein paar > gecshickten Rechenformeln kannst du die Schüssel minutengenau ausrichten Vielen Dank für den Tipp, allerdings liegt ein Gesamtbudget von <100€ vor und das muss für alle Sensoren, Kabel, Sicherungen, Platinen, Konstruktion, Antrieb etc etc reichen, somit wäre ich gerne mit Motor und Treiber bei 20€-25€. Mani W. schrieb: > Hier eine rein analoge Version und mit einfachen Mitteln > herzustellen.... Ja, die Variante habe ich mal getestet gehabt aber wie schon geschrieben, wollten wir der Tatsache aus dem Weg gehen, dass es hier zu Störungen kommen kann und haben uns somit für die Berechnung der Azimut entschieden. Würde dieser Motor mit einem L293D und nochmal 1:4 Untersetzt eventuell ausreichen? https://www.conrad.de/de/igarashi-getriebemotor-1312-typ-33g-244040.html Mir fällt es schwer aus mangelnder Erfahrung abzuschätzen ob die Reibung vielleicht doch viel zu hoch ist und wie viel der Motor dann bei der Umdrehungsanzahl für Strom nimmt, der L293D darf ja nur 600mA/1,2A Peak.
Bastler schrieb: > übersetzter antrieb über zahnriemen dann reicht ein nema17 schrittmotor > den brauchst du ja immer nur einschalten wenn gedreht werden soll Immer vorausgesetzt, das soetwas wie Wind nicht gibt. In der Realität wird man ein selbsthemmendes Getriebe vorsehen müssen oder einen Absolutencoder für die Position - sonst geht das leicht mal schief.
Hallo! Für eine billige Demonstrationsanlage kannst Du zum nächsten Schrotthändler gehen. Ein Fahrradrahmen hat ein sehr stabiles Tretlager. Das ist auch für den Einsatz im Freien konstruiert und für große Kräfte und Drehmomente ausgelegt. Was Du vom Rahmen nicht brauchst: wegflexen! Auf der einen Seite ist schon ein Kettenrad zum untrersetzten Antrieb vorhanden. Das Gegenstück (kleines Ritzel) wird auf einen passenden Achsstummel (M8/M10-Schraube) montiert. Kette ist meist auch da. Als Antrieb ein alter Akkuschrauber. Fertig. (So würde es Finger(C) machen.)
Fabian S. schrieb: > Würde dieser Motor mit einem L293D und nochmal 1:4 Untersetzt eventuell > ausreichen? was heisst da 1:4 Du musst deinen Motor so untersetzen, dass letzten Endes von einer Drehzahl von vielleicht 3000 U/min auf 1 Umdrehung pro Tag kommt! Da du den Motor natürlich nicht durchlaufen lässt (und in der Nacht zurückfahren musst), wirst du natürlich etwas höher untersetzen. Aber auf jeden Fall hast du Spielraum um eine riesige Untersetzung zu realisiern. Mit dem Faktor, mit dem du die DRehzahl reduzierst, erhöht sich as Drehmoment. Untersetzt du 1:1000, dann hast du am letzten Abtrieb (Reibungsverluste mal ignoriert) ein um den Fakor 1000 höheres Drehmoment, als das welches der Motor direkt liefern kann. Kraft ist nicht das Problem. Der Hauptspiegel des Palomar Observatoriums wiegt ca. 14 Tonnen. Inklusive Montierung kommt man auf ungefähr 100 Tonnen. Nachgeführt wird es von einem Motor mit 7.5 PS Leistung.
Route 6. schrieb: > Als Antrieb ein alter Akkuschrauber. Fertig. Da würde mein Prof. sich aber wundern wenn ich ihm nen Akkuschrauber in die Hand drücke :D Also es muss schon professionell umgesetzt sein, mit dem Fahrrad Getriebe ist eine gute Idee nur das werde ich von den Kosten nicht vertreten können. Wenn etwas vorhandenes verwendet wird muss es trotzdem Kalkuliert werden. Karl H. schrieb: > was heisst da 1:4 > Du musst deinen Motor so untersetzen, dass letzten Endes von einer > Drehzahl von vielleicht 3000 U/min auf 1 Umdrehung pro Tag kommt! Da du > den Motor natürlich nicht durchlaufen lässt (und in der Nacht > zurückfahren musst), wirst du natürlich etwas höher untersetzen. Aber > auf jeden Fall hast du Spielraum um eine riesige Untersetzung zu > realisiern. Mit dem Faktor, mit dem du die DRehzahl reduzierst, erhöht > sich as Drehmoment. Untersetzt du 1:1000, dann hast du am letzten > Abtrieb (Reibungsverluste mal ignoriert) ein um den Fakor 1000 höheres > Drehmoment, als das welches der Motor direkt liefern kann. > Kraft ist nicht das Problem. Der Hauptspiegel des Palomar Observatoriums > wiegt ca. 14 Tonnen. Inklusive Montierung kommt man auf ungefähr 100 > Tonnen. Nachgeführt wird es von einem Motor mit 7.5 PS Leistung. Vielen Dank der Beitrag hilft mir sehr. Natürlich muss die Umdrehung schon mehr als einmal Pro Tag leisten können, da etwa alle 5-10 min.(hängt dann von Nutzen/Verbrauch ab) einmal nachgedreht wird und die Geschw. dann schon nicht zuuu langsam seien darf. Dennoch bestärkt es mich einen relativ schwachen Getriebemotor mit 50-100 rpm zu nehmen und das dann mittels Zahnriemen auf die Welle zu bringen, denke das man so das Drehmoment nochmal sehr verstärken und ich mit dem kleinen Motor beim L293D bleiben kann. Morgen wird die Konstruktion aufgebaut und dann zeitnah mit Rolle und Gewicht getestet was für ein Trägheitsmoment vorliegt.
Fabian S. schrieb: > Der Servo fällt in meinen Augen wegen dem Haltestrom und somit wegen > Energiebilanz raus. Getriebemotor hat den Vorteil das die Programmierung > recht simpel ausfällt, da sich hier die Nachführung auf "drehe solange > bis Wert des Kompass erreicht ist" beschränkt. Dann mach eben eine Getriebemotorsteuerung. Du nimmst Dir ein Servo, das die noetige Kraft aufbringen kann und schmeisst dessen Elektronik raus. Da hast Du dann den fertigen Getriebemotor, der zusaetzlich noch eine Lageerfassung mit Poti mitbringt. Oder Du schaltetst das Servo eben nur einige Sekunden je Minute ein. wendelsberg
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.