Moin, ich habe hier ein unbekanntes Schrittmotörchen: http://www.banggood.com/10Pcs-2-Phase-4-Wire-Stepper-Motor-3_9MM-Micro-Stepper-Motor-p-998054.html Leider fehlt jegliche Info. Die Spulen haben 60Ohm, mehr kriege ich so ja nicht raus. Winkel/Schritt wird ja groß sein, ich hoffe, daß ich so die Polungen der Spulen durch probieren identifizieren kann. Meine Sorge gilt dem Strom. Wenn ich mal schätze, daß der Winzling 0,1W Verlustleistung verträgt, wären das bei den 60 Ohm ein Rating von 40mA und 2,5V. Klingt für mich plausibel, oder? Betreiben will ich das Ding mit dem Easydriver: http://www.schmalzhaus.com/EasyDriver/index.html Die Sense-R ändere ich auf 10 Ohm und sollte damit den Strom auf 12,5-62,5mA einstellen können. Irgendwelche Einwände bis hierhin? Meine Hauptfrage ist nun, wie identifiziere ich die Spulen am besten? Gibt es da eine schlauere Strategie als einfach alles auszuprobieren? Das ist doch bestimmt ein üblicher Task für Bastler - unbekannter Schrittmotor. Gruß, Norbert
Norbert S. schrieb: > Gibt es da eine schlauere Strategie als einfach alles auszuprobieren? Du sagst es. Vollschritt und einfach ausprobieren. Geht schneller als da des langen und breiten rumzu theoretisieren. Du musst nur wissen, welche Spule gerade bestromt wird. Daher langsam und mit Vollschritt arbeiten. Du kannst dazu auch einen Akku oder ein Netzteil nehmen anstatt deiner Steuerung. Auf die Welle klebst du dir eine Fahne aus Klebeband. Dann probierst du eine Spule nach der anderen und eine Polung nach der anderen durch. Entweder der Motor macht den Schritt in die richtige Richtung oder er macht es nicht und so viele Möglichkeiten gibt es ja dann auch wieder nicht. Nach ein paar MInuten hast du die richtige Reihenfolge, in der du die Spulen wie rum aktivieren musst, damit der Motor einen Schritt nach dem anderen macht. Kein Problem.
:
Bearbeitet durch User
Die eine heisst Paul und die andere Elfriede! Was meinst Du mit: Spulen identifizieren? Wozu wäre das interessant? Die haben normalerweise keine eigene Identität. Und übrigens auch keine "Polung". Falls es darum geht, herauszufinden, welche Anschluss zu welcher Wicklung gehört, dann gibt es, bei insgesamt zwei Wicklungen, den einfachen Fall, das nur jeweils zwei Anschlüsse überhaupt eine niederohmige Verbindung miteinander haben. Der "Bastler" findet das einfach durch Messung heraus. Da gibt es leider keine Genie-Abkürzung.
Hm. Wenn sich Karl Heinz die Mühe macht darauf einzugehen ... Ich verstehe es trotzdem nicht. Bei zwei Wicklungen, gibt es auch nur zwei mögliche Reihenfolgen (im Vollschritt) die Wicklungen zu bestromen. Dreht er andersherum als gewünscht, nehme ich einfach die andere Reihenfolge. Oder verstehe ich irgendwas falsch?
Klaus schrieb: > Hm. Wenn sich Karl Heinz die Mühe macht darauf einzugehen ... > > Ich verstehe es trotzdem nicht. Bei zwei Wicklungen, gibt es auch nur > zwei mögliche Reihenfolgen (im Vollschritt) die Wicklungen zu bestromen. > Dreht er andersherum als gewünscht, nehme ich einfach die andere > Reihenfolge. Oder verstehe ich irgendwas falsch? Nein. Seh ich genau so. Problem ist wie immer, das die Leute denken das wäre alles Raketentechnik. Klar könnte man beim probieren die Spulen durchheizen. Aber ich muss ja nicht gleich mit dem 12V PC Netzteil da drann gehen und eine einzelne SPule 2 Stunden lang bestromen (und aufheizen). Da drinnen ist nur Draht, der aufgewickelt ist. Mehr ist da nicht drinn (was mich an dieser Stelle interessieren müsste). Wenns falsch rum ist, dann ist es eben falsch rum. Das Magnetfeld baut sich aders rum auf und der Rotor wird von einem anderen Magneten angezogen als er sollte, damit der nächste Schritt in die richtige Richtung geht. Was solls. Dann eben wieder zurück zur Ausgangsposition und eine andere Polung probiert. Das man die beiden Spulen abwechselnd bestromen muss, ist wohl als Arbeitshypothese die sinnvollste Annahme. Dann probier ich halt mal
1 | Spule 1 Spule 2 |
2 | |
3 | oben + |
4 | unten - |
5 | |
6 | oben + |
7 | unten - |
8 | |
9 | oben - |
10 | unten + |
11 | |
12 | oben - |
13 | unten + |
14 | |
15 | oben + < und damit bin ich wieder in der |
16 | unten - Ausgangsposition |
macht das Motörchen jeweils einen Schritt (die aufgeklebte Fahne verrät mir das), dann hab ich die Reihenfolgeund seh auch gleichzeitig in welche Richtung das geht. Dazu nehm ich mir eine stink normale AA-Batterie und seh mir mal an, ob die Spannung schon reicht, damit das Motörchen einen Schritt macht. Wenn der SChritt mehr so ein rumgeschleiche zur nächsten Position ist, dann sind die 1.5V ein bischen wenig und such mir halt was mit ein bisschen mehr Spannung. wenn sich überhaupt nichts tut, dann ist 1 Batterie viel zu wenig und ich nehm halt mal 2 Stück in Serie.
:
Bearbeitet durch User
Klaus schrieb: > Was meinst Du mit: Spulen identifizieren? Wozu wäre das interessant? Die > haben normalerweise keine eigene Identität. Und übrigens auch keine > "Polung". Klar, die Polung der Spulen entscheidet "nur" über die Ankerorientierung und damit über die Drehrichtung.
Norbert S. schrieb: > Meine Hauptfrage ist nun, wie identifiziere ich die Spulen am besten? > Gibt es da eine schlauere Strategie als einfach alles auszuprobieren? Ausprobieren passt, wenn du weisst, welche Anschlussdrähte jeweils zu einer Wicklung gehören. In der Animation bei NanoTec kannst du dir das auch angucken (Einstellung "Vollschritt") http://de.nanotec.com/support/tutorials/schrittmotor-und-bldc-motoren-animation/
W.A. schrieb: > Klaus schrieb: >> Was meinst Du mit: Spulen identifizieren? Wozu wäre das interessant? Die >> haben normalerweise keine eigene Identität. Und übrigens auch keine >> "Polung". > > Klar, die Polung der Spulen entscheidet "nur" über die Ankerorientierung > und damit über die Drehrichtung. Dein Einwand ist schon berechtigt, weil meine Ausdrucksweise zu lakonisch war. Ich meinte natürlich, dass die Spulen keine absolute Polung haben. Das von der Abfolge der Polungen die Drehrichtung abhängt, ist durchaus klar.
https://www.mikrocontroller.net/articles/Schrittmotoren Am Ende des Artikels sind noch Links, der Roboternetz Artikel hilft sicher auch weiter.
Angehängte Dateien:
-

Stepper-Test.png
970 KB
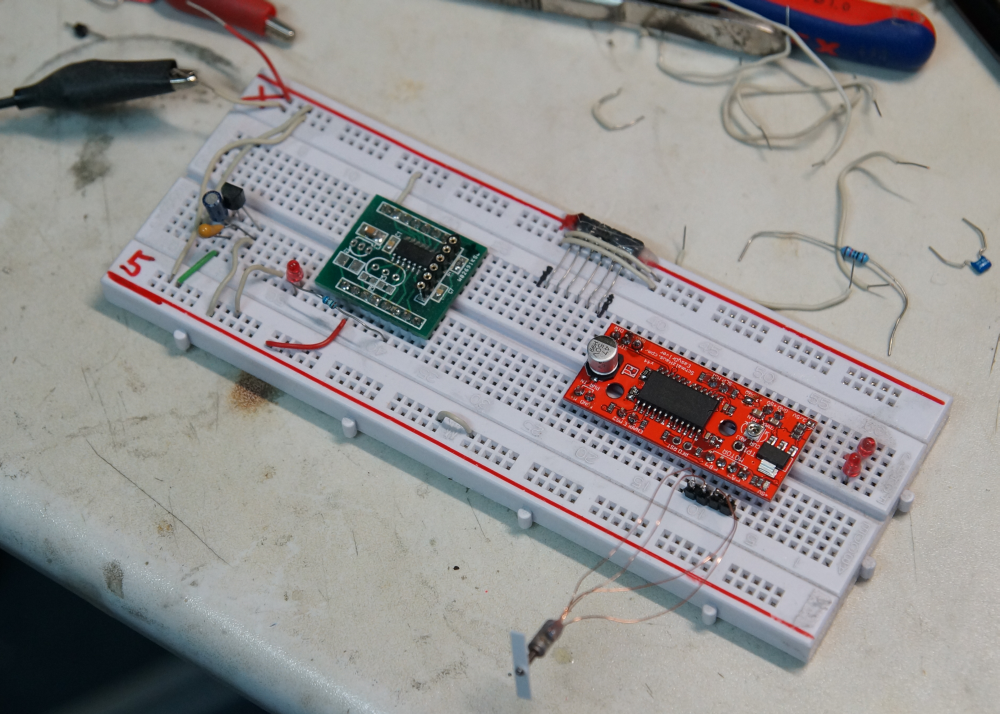
Hi, Danke für die engagierte Teilnahme! Die Spulen habe ich ja (woher hätte ich sonst die 60 Ohm), ich weiß nur nicht was A, B und die jeweilige Polung ist. Ich probiere das also aus. Es soll z.B. sein +A -A +B -B. Habe ich z.B. +B -B +A -A läuft er auch, nur "falsch" herum. -A +A -B +B ebenso. -B +B +A -A würde aber nicht sinnvoll laufen, stimmt das so? Daß das im Vollschrittbetrieb erheblich einfacher ist war mir klar, hätte ich schreiben sollen. Ich probiere das jetzt. Testaufbau mit ATtiny841 auf Steckbrett anbei... Gruß, Norbert
Um die Drehrichtung zu ändern, brauchst Du nur die Anschlüsse einer Wicklung zu vertauschen. Ist das soweit klar? Oder brauchst Du tatsächlich eine explizite Zuordnung zwischen A und B und + und - und der Drehrichtung?
Klaus schrieb: > Um die Drehrichtung zu ändern, brauchst Du nur die Anschlüsse einer > Wicklung zu vertauschen. Ist das soweit klar? Hi, nee, ich hätte gedacht ich vertausche die Wicklungen? Also A+ A- B+ B- dreht rechts, B+ B- A+ A- dreht links. Nee, ich glaube das stimmt nicht. Lasst mich mal probieren, dann habe ich das... Jojo S. schrieb: > Der ist ja niedlich, wo findet man denn solche Motörchen? Nur speziell für Dich: Norbert S. schrieb: > Moin, > > ich habe hier ein unbekanntes Schrittmotörchen: > http://www.banggood.com/10Pcs-2-Phase-4-Wire-Stepper-Motor-3_9MM-Micro-Stepper-Motor-p-998054.html Gruß, Norbert
Jojo S. schrieb: > Der ist ja niedlich, wo findet man denn solche Motörchen? Interessanter wäre sicher, was man mit solchen Minis macht?
Die könnten aus kleinen 3,5" Laufwerken stammen. Dann sollte sie allerdings 80Steps haben und Halbschritt eher 0.25/0.75.
Norbert S. schrieb: > Klaus schrieb: >> Um die Drehrichtung zu ändern, brauchst Du nur die Anschlüsse einer >> Wicklung zu vertauschen. Ist das soweit klar? > > Hi, > > nee, ich hätte gedacht ich vertausche die Wicklungen? Du hast doch nur 2! Denk doch ein bisschen mit. Du hast 2 Wicklungen. Beide sind nichts anderes als Elektromagnete! welche Polung das Magnetfeld hat, hängt davon ab, an welchem Ende der Spule du + und an welchem du - anhängst. Drehst du das um, dann baut sich auch das Magnetfeld anders rum auf. Das eine mal wird die Spule von Nordpol eines Dauermagneten angezogen, das andere mal abgestossen. Das eine mal macht also die so bestromte Wicklung einen Schritt auf diesen Nordpol zu, und das andere mal von ihm weg. Es ist schon ein Krampf was in unseren Schulen im Physikunterricht verbrochen wird. Und dann reden wir immer vom Facharbeitermangel.
:
Bearbeitet durch User
google schrieb: > Interessanter wäre sicher, was man mit solchen Minis macht? Ein AMM basteln. Zeiger aus Federdraht, unteres Ende in die Spindel hängen, Skala... fertig :)
Karl H. schrieb: > Denk doch ein bisschen mit. > > > Es ist schon ein Krampf was in unseren Schulen im Physikunterricht > verbrochen wird. Halt Stop. Das ist zu hart. Mein letzter Physikunterricht war Leistungskurs und ist > 35 Jahre her. Wie so ein Magnet funktioniert ist mir schon klar. Mein täglich Brot sind Brushlessmotoren. Die Anordnung der Spulen im Schrittmotor aber aktuell nicht. Ich muß noch eben etwas am Auto meiner Frau schrauben bevor es dunkel wird und dann wird das ausprobiert... google schrieb: > Interessanter wäre sicher, was man mit solchen Minis macht? Radargerät für ein eine Hermann Warwede in 1:72 z.B.. So kleine Getriebemotoren gibt es nicht. Suchscheinwerfer für sowas drehen wäre die nächste Möglichkeit. Abseits von Mikromodellbau gibt es aber in der Tat kaum Anwendungen, das Drehmoment dürfte ja ebenso winzig wie der Motor sein. Gruß, Norbert
Teo D. schrieb: > Die könnten aus kleinen 3,5" Laufwerken stammen. Ämm, das sollte wohl besser "3,5" Disketten Laufwerke" heißen.
Norbert S. schrieb: > Radargerät für ein eine Hermann Warwede in 1:72 z.B.. So kleine > Getriebemotoren gibt es nicht. > Suchscheinwerfer für sowas drehen wäre die nächste Möglichkeit. Tolle Sache, vielen Dank für die Info.
Norbert S. schrieb: > Mein täglich Brot sind Brushlessmotoren. Na dann. > Die Anordnung der Spulen im Schrittmotor aber aktuell nicht. Na wie wohl Konzeptionell
1 | Spule A |
2 | o o |
3 | | | |
4 | +--####--+ |
5 | |
6 | o--+ |
7 | | |
8 | # |
9 | B # Rotor |
10 | # |
11 | | |
12 | o--+ |
technisch ist das zwar ein bisschen anders gemacht, weil du ja nicht nur 4 Vollschrittpositionen pro Umdrehung haben willst, aber konzeptionell kannst du davon ausgehen.
Hallo Karl Heinz, Ich glaube mein Denkfehler war, daß da ja keine Permanentmagnete drin sind. Gib mir ne Stunde, dann hab ich Zeit das auszuprobieren und meine Vorstellungen von Theorie und Praxis in Einklang zu bringen. Danke für die Hilfe! Wenn das Ding dreht gibt es ein Video. Gruß, Norbert
Norbert S. schrieb: > Hallo Karl Heinz, > > Ich glaube mein Denkfehler war, daß da ja keine Permanentmagnete drin > sind. Bei einem nur zweisträngigen Motor muss ein Permanentmagnet enthalten sein. Das ergibt sich aus allgemeinen Überlegungen in Bezug auf Symmetrie. Bei einem Reluktanzmotor (also einem lediglich magnetisch leitendem Läufer, der selbst nicht magnetisch ist) gäbe es sonst keine Möglichkeit die Drehrichtung zu kontrollieren. Beide Nachbarpositionen würden ja symmetrische Kräfte auf den Läufer ausüben.
Teo D. schrieb: > Die könnten aus kleinen 3,5" Laufwerken stammen. Ach was, viel zu wenig Kraft, aus (Digital-)Kameras stammen die, um am Objektiv zu drehen.
MaWin schrieb: > Ach was, viel zu wenig Kraft, aus (Digital-)Kameras stammen die, um am > Objektiv zu drehen. Hmm.. Zu Optik, passt die Steigung der Schnecke, auch besser.
MaWin schrieb: > Ach was, viel zu wenig Kraft, aus (Digital-)Kameras stammen die, um am > Objektiv zu drehen. Genau, hier gibts den "großen" Bruder ebay 151803644485
Hi, Läuft. Das Motörchen läuft erst ab 30mA Strom überhaupt vernünftig. 15 Schritte pro Umdrehung im Vollschrittbetrieb. Jetzt betreibe ich ihn wie in dem Video mit 60mA im 1/8 µSchrittbetrieb bei 0,5 Umdrehungen / Sekunde. Das ist so ziemlich genau das was ich brauche. Codeschnippel: ------------------ Rpm = 5 'in 0.1 RPM Steptime = Rpm * 240 '15 steps *2 * 8µSteps Steptime = 10000 / Steptime 'ms Do Toggle Led Waitms Steptime Loop ------------------ Dabei sieht man so gerade eben die Schritte nicht mehr, wenn man nicht genau hinsieht. Bei den 60mA muß man sich schon Mühe geben, eine Erwärmung des Motors zu spüren, da geht also vermutlich noch etwas mehr. Um ihn nur drehen zu lassen, müsste das sogar so gerade eben direkt an einem AVR gehen aber die Problematik freilaufdioden und Strombegrenzung überlasse ich bei den Preisen von Bangood doch einfach dem Easydriver-Board. (A3967 Treiber). Gruß, Norbert
Norbert S. schrieb: > Dabei sieht man so gerade eben die Schritte nicht mehr, wenn man nicht > genau hinsieht. Sehr schönes Radar ;-) Mit dem Treiber ist es doch auch kein Thema die Antenne im Mikroschrittbetrieb rotieren zulassen. p.s. Über das "wait" im Programm kann man allerdings noch mal nachdenken - oder gibt es auf dem Modell nichts anderes zu steuern?
Moin, Wolfgang schrieb: > Sehr schönes Radar ;-) > > Mit dem Treiber ist es doch auch kein Thema die Antenne im > Mikroschrittbetrieb rotieren zulassen. Danke, das ist doch schon Mikroschrittbetrieb! 1/8, default bei dem Treiberboard. Wolfgang schrieb: > p.s. > Über das "wait" im Programm kann man allerdings noch mal nachdenken - > oder gibt es auf dem Modell nichts anderes zu steuern? Mensch, das ist mein Testaufbau. Später wird das ein M88 machen, bei dem aber auch keine Timer oder PWM mehr frei sein werden. Da leite ich den Takt dann in der Hauptschleife mit Flags aus den Ints der PWM ab oder so. Für einen Takt auf dem Steckbrett um sowas zu testen ist "wait" aber immer eine schön schnelle Lösung. Gruß, Norbert
Moin, Also hier ist das Radar. Diese Schrittmotörchen haben wirklich null Drehmoment. Mein Problem war am Ende die Trägheit des Radarbalkens. 2x1,5x26mm ABS. Jetzt passt es einigermassen im Microschrittbetrieb 1/8 ohne daß es zu sehr ruckelt. Langsamer geht nicht und mehr Strom ist auch kontraproduktiv, ruckelt nur mehr. Ich habe das Ding gequält, bis es richtig heiss wurde - keine Chance. Fazit: Für die ersten Schritte mit Schrittmotoren (das waren nicht ganz meine Ersten), sind diese Motörchen absolut nicht geeignet. Die ersten Schritte mit Schrittmotoren - no pun intendet... Für mich hat es aber letztendlich gut geklappt. Die Freizeitkapitäne am Modellbootteich werden Bauklötze staunen, wie man denn so kleine Radarantriebe hinkriegen kann. Was Anderes kann man mit den Winzlingen aber wohl echt nicht anfangen. Gruß, Norbert
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.