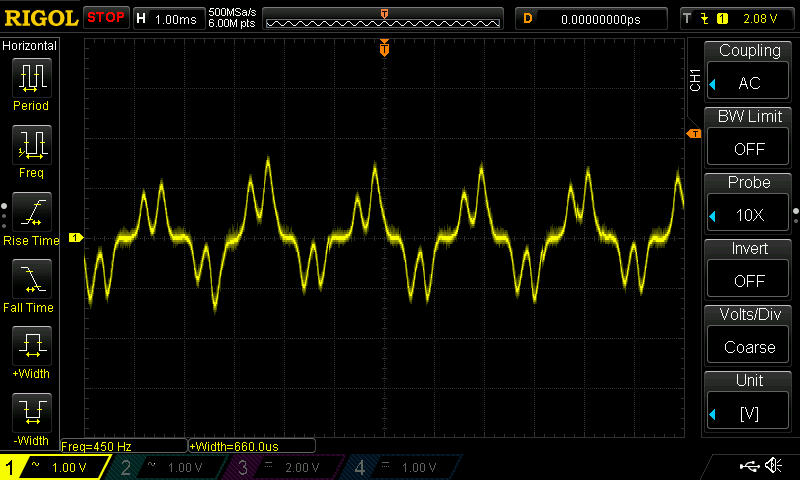
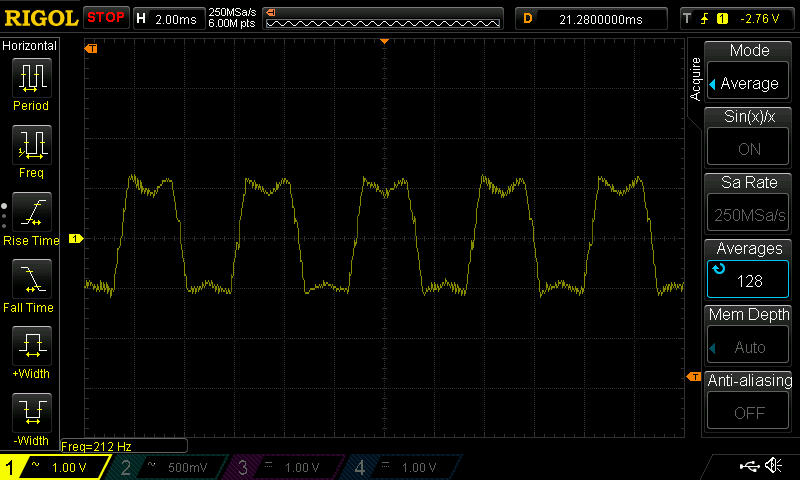
Hallo Leute, ich hoffe es kennt sich einer von euch gut mit diesem Sachverhalt aus, ich bin gerade dabei das SVPWM Modul für eine Motorsteuerung zu designen. - Eingangsgrößen sind alpha und betha Werte aus dem Koordinatensystem, Wertebereich ist von -250 -- +250 für den jeweiligen Wert. - Das Modul berechnet nun Sektor, Betrag und die jeweiligen Dutys... Mein einziges Problem ist der Strom durch den BLDC Testmotor, in angehängter Grafik erkennt man deutlich die 3. Harmonische, die aber laut Literatur nur als Spannung anliegen soll, der Strom soll ja Sinusförmig sein, ist er leider nicht... Die Grafik zeigt den Motorstrom einer Phase bei halber maximaler Drehfrequenz. Motor befindet sich im Leerlauf. Was noch zu erwähnen wäre ist, dass wenn ich das Feld abreisen lasse, der Strom fast perfekt Sinusförmig ist. Anscheinend entstehen die Einbrüche durch die Gegeninduktion der Permanentmagneten, kann das möglich sein? Danke im voraus ;)
Angehängte Dateien:
-

DS1Z_QuickPrint3.jpg
76 KB
Wanninger schrieb: > Mein einziges Problem ist der Strom durch den BLDC Testmotor, > in angehängter Grafik erkennt man deutlich die 3. Harmonische, Du solltes Dein FFT-Auge neu justieren. Mach' mal erst ne echte FFT. Ich kann mit meinem geschulten ;-) Auge nur ne 5. und ne 7. erkennen. > Die Grafik zeigt den Motorstrom einer Phase bei halber maximaler > Drehfrequenz. > > Motor befindet sich im Leerlauf. Der Strom im Leerlauf ist nicht aussagekräftig. Belaste die Welle mal mechanisch. > Was noch zu erwähnen wäre ist, dass wenn ich das Feld abreisen lasse, > der Strom fast perfekt Sinusförmig ist. Was soll "Feld abreisen lassen" sein? Meinst Du, damit, dass die Maschine kippt? Das hieße dann aber, das Du die Maschine sensorlos kommutierst? Das wäre evtl. auch noch eine hilfreiche Information, die mir meine Glaskugel leider nicht liefert... > Anscheinend entstehen die Einbrüche durch die Gegeninduktion der > Permanentmagneten, kann das möglich sein? Ja, nachdem dieser für die Polradspannung verantwortlich ist. Also, bitte ein paar weitere Informationen... Grüßle, Volker.
Angehängte Dateien:
-

DS1Z_QuickPrint11.jpg
78 KB
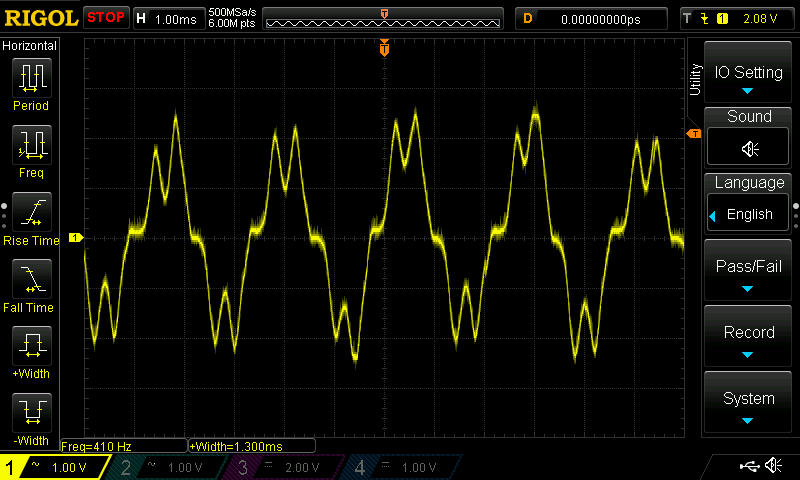
Hallo, alles klar also mein Testmotor (Permanent erregt): http://rctimer.com/product-881.html Ist nur zu Testzwecken später wird ein größerer Outrunner als Motor zum Einsatz kommen, ist alles noch ziemlich Anfangsphase. Anbei ein Bild des Motorstroms unter Last bei etwa 40W mechanischer Abgabeleistung. Zur zeit läuft das alles Open Loop, daher keine Regelung vom Feld, es wird eine Fest programmierte Tabelle mit alpha und betha Werten abgefahren. > Was soll "Feld abreisen lassen" sein? Rotor steht und Feld dreht weiter, der Rotor vibriert dann nur, weil er dem Feld nicht mehr nachkommt. Was ich als Problem sehe ist, dass wenn ich diese Ströme durch die Park - Clarke Transformation schicke einen extremen Ripple auf meinen d und q Werten habe die man unmöglich zum Feld regeln verwenden kann...
Treib den Motor mal an miss die induzierte Spannung. Wenn diese sinusförmig ist, dann ist irgendwo noch ein Fehler, wahrscheinlich in Zeile 3756. Wanninger schrieb: > - Eingangsgrößen sind alpha und betha Werte aus dem Koordinatensystem, > Wertebereich ist von -250 -- +250 für den jeweiligen Wert. Warum denn -250 bis 250? Das ist ja mehr als ungünsitg. 2er Potenzen lassen grüßen!
Wie sehen denn deine Spannungen aus die aus der SVPWM raus kommen? Schliesse mal keinen Motor an sondern 3 Widerstände mit Kondensator Parallel im Stern oder Dreieck als Last an. Dann miss mal die Spannungen. Und kennst du den Thread? Beitrag "SVPWM mit LPC1769" Gruß Tec
:
Bearbeitet durch User
Wanninger schrieb: > also mein Testmotor (Permanent erregt): > http://rctimer.com/product-881.html Leider ist die Seite nicht erreichbar :-( und auf dem Durcheinander aus dem Google-Chache kann ich keine Details erkennen. Wie ist denn der Rotor aufgebaut? Befinden sich die Magnete auf der Oberfläche des Läufers oder sind sie in Taschen im Blechpaket untergebracht? Im zweiten Fall ist zum einen die Induktivität des Motors stark winkelabhängig und außerdem weicht die Polradspannung idR. stark von der Sinusform ab. Ein Oszillogramm der Leerlaufspannung des angetrieben Motors wäre hilfreich. > Anbei ein Bild des Motorstroms unter Last bei etwa 40W mechanischer > Abgabeleistung. OK, danke. > Zur zeit läuft das alles Open Loop, daher keine Regelung vom Feld, > es wird eine Fest programmierte Tabelle mit alpha und betha Werten > abgefahren. Was heißt das denn jetzt? Verwendest Du einen Lagegeber oder nicht? Wie gesagt, sind meine hellseherischen Fähigkeiten außerordentlich begrenzt. >> Was soll "Feld abreisen lassen" sein? > > Rotor steht und Feld dreht weiter, der Rotor vibriert dann nur, > weil er dem Feld nicht mehr nachkommt. OK, der richtige Ausdruck, den jeder, der "vom Fach" ist, versteht, da er in der Literatur verwendet wird, wäre: "Die Maschine fällt außer Tritt" oder "die Maschine kippt". > Was ich als Problem sehe ist, dass wenn ich diese Ströme durch die > Park - Clarke Transformation schicke einen extremen Ripple auf meinen > d und q Werten habe die man unmöglich zum Feld regeln verwenden kann... Es liegen gewaltige Oberschwingungen 5. und 7. Ordnung auf Deinem Strom. Deren Ursache könnte ein großer Unterschied zwischen Ld und Lq sein oder eben sehr große Oberschwingungen auf der Polradspannung. Ein Foto des Rotors und ein Oszillogramm der Polradspannung wäre hilfreich Grüßle, Volker.
:
Bearbeitet durch User
Ingo schrieb: > Tec N. schrieb: >> mit Kondensator >> Parallel > > what? 3 RC Kombinationen sonst siehst ja immer PWM. Nur Parallel ist Quatsch, Serie natürlich! @Volker: Ich kann die Seite laden. Ist ein einfacher Außenläufer mit Oberflächen Magneten. Und im Modellbau üblichem großen Luftspalt. Normalerweise sind die Induktivitäten bei den Antrieben nur wenig achsig (Ld, Lq ungefähr gleich) Ich vermute mal das der Motor so Langsam gedreht wird, dass er dem Feld mit kleinem Polradwinkel folgt. Und das Rastmoment des Motors dazuführt das die Glocke dabei immer schwingt. Oder die SVPWM ist schlicht falsch. Aber das ist alles Glaskugel Esotherik
:
Bearbeitet durch User
Tec N. schrieb: > 3 RC Kombinationen sonst siehst ja immer PWM. Nur Parallel ist Quatsch, > Serie natürlich! ...besser ein RL-Glied. > @Volker: Ich kann die Seite laden. Danke für den Hinweis. Jetzt mag sie sich auch mir öffnen... > Ist ein einfacher Außenläufer mit > Oberflächen Magneten. Und im Modellbau üblichem großen Luftspalt. > Normalerweise sind die Induktivitäten bei den Antrieben nur wenig achsig > (Ld, Lq ungefähr gleich) Ja, so würde ich das auch sehen. Der Motor weist vermutlich eine blockförme Polradspannung auf, ist also weit vom idealen Sinus entfernt. Aufrund der hohen Polpaarzahl wäre jetzt natürlich sehr interessant zu erfahren, wie der Rotorwinkel ermittelt wird. Einen Lageber kann ich nicht erkennen. > Ich vermute mal das der Motor so Langsam gedreht wird, dass er dem Feld > mit kleinem Polradwinkel folgt. Und das Rastmoment des Motors dazuführt > das die Glocke dabei immer schwingt. Eine ruckartige Bewegung würde die Einbrüche im Strom erklären. Schade, dass man hier um jedes Bisschen Information betteln muss... Grüßle, Volker.
Volker B. schrieb: > Ja, so würde ich das auch sehen. Der Motor weist vermutlich eine > blockförme Polradspannung auf, ist also weit vom idealen Sinus entfernt. Das geht eigentlich, der Chinese macht sich da nicht viel Gedanken, Hauptsache billig. Weil die Gerade Magnete nehmen und auf die Glocke kleben, ist die Gegenspannung der Maschine recht sinusförmig. OT: Man kann die durchaus ohne Probleme feldorientiert Regeln. Aber dann braucht man einen guten Beobachter der auch mit Feldfrequenzen von 2kHz kein Problem hat und etwas Rechenleistung. Gruß Tec
Moin moin, jetzt gebe ich auch noch meine Senf dazu ;-) Ich se's auch so wie Tec. Die Induktivitäten werden vermutlich ungefähr gleich sein. Bei großem Luftspalt ist vermutlich auch die EMK ungefähr sinusförmig. Ich würde hier einfach Schritt für Schritt vorgehen. D.h. erst mal EMK mit dem Multimeter aufnehmen und prüfen ob die EMK blockförmig oder eher wie vermutet sinusförmig ist. Die EMK braucht man später sowieso für die Auslegung des Regelkreises. Danach würde ich mir mal die SVPWM selbst vornehmen. Ich verwende hier meist nur ein einzelnes Statorpaket ohne Rotor (==> keine Rückrikung vom Rotor). Die SVPWM würde ich dann rein gesteuert fahren und die Phasenströme messen. Diese sollten dann simusförmig sein. Was ich auch oft mache ist, dass ich RC-Glieder gegen Masse Schalte und dann die Spannungen messe. Hier sollten sich die bekannten "Popokurven" ergeben. Wenn das Oszi dann auch noch Mathe kann könne man zwei Popokurven voneinander Subtrahieren und erhält eine Sinusspannung (wenn alles richtig umgesetzt ist ;-)). D.h. zusammengefasst. Man sollte immer nur eine Funktion nacheinander in Betrieb nehmen und möglichst viele Schmutzeffekte wie z.B. die EMK des Motors ausschließen. Viele Grüße, Gonzo.... PS: Der Werteberech von -250...250 ist wirklich nicht optimal ;-)
Angehängte Dateien:
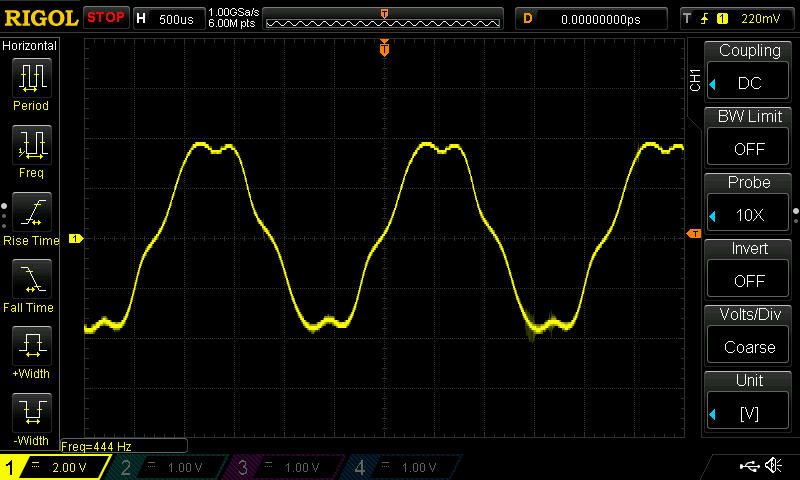

Hallo Leute, schonmal vielen Dank für die ganzen Antworten. also: > Treib den Motor mal an miss die induzierte Spannung. Wenn diese sinusförmig ist, dann ist irgendwo noch ein Fehler Anbei sind Aufnahmen der Motorwerte wenn der Motor extern angetrieben wird, - Spannung Phase Phase - Strom Phase > Warum denn -250 bis 250? Das ist ja mehr als ungünsitg. 2er Potenzen lassen grüßen! Es geht darum bei der geometrischen addition nicht über 16bit zu kommen --> kurze Laufzeit > Was heißt das denn jetzt? Verwendest Du einen Lagegeber oder nicht? Wie gesagt, sind meine hellseherischen Fähigkeiten außerordentlich begrenzt. Ich verwende keinen Lagegeber, es wird eine sture V/Hz Rampe hochgefahren
Wie waren die Phasen verschaltet als du den Motor gedreht hast? Das sieht so aus als wenn die Glocke eine Unwucht hat. Und warum fließt da Strom? Die Maschine sollte leer laufen mit allen Phasen offen. Akkuschrauber drauf, Tastkopf an eine Phase, und Masseklemme an eine andere Phase. Motor festhalten und Akkuschrauber drehen lassen. Das Scope Bild was daraus kommt das würde mich und die anderen brennend interessieren :)
Angehängte Dateien:
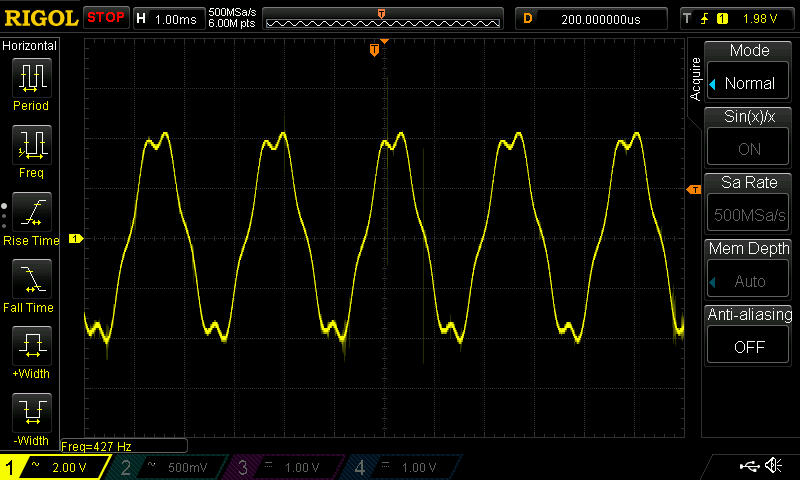
alles klar, anbei die Aufnahme der Motorspannung unbelastet, wieder angetrieben mit Bohrmaschine. Danke für eure Hilfe, bin grad dabei die gemittelte Spannung direkt aus der PWM Stufe zu untersuchen.
Angehängte Dateien:
-

mit_RL_Glied.jpg
71 KB
Hallo Leute,
anbei eine Aufnahme der PWM Ausgänge mit RL Glied,
das sollte die bekannten Popokurven darstellen.
> Stern oder dreieck?
In der Regel Dreieck, es sind keine gemeinsamen Verbindungen
der Wicklungen ersichtlich.
Bei Testläufen, verhält sich alles sehr neutral, Ohne Rotor habe ich einen fast perfekten Sinusförmigen Strom. Ich vermute stark, das das Problem am Motor liegt, da diese Art eigentlich für die verbreitete Blockkommutierung ausgelegt ist, werde mir demnächst einen PMSM o.ä. besorgen, mal sehen.
Der Witz ist, dass jeder Motor für konstantes Moment gerne mit der Spannungsform angesteuert werden möchte die er auch induziert. Das ergibt sich aus dem Energieerhaltungssatz. Die Verläufe sehen für mich eher nach Blockkommutierung aus. Allerdings ist der Stromverlauf im Betrieb ohne Lagerückmeldung so eine Sache. Der Rotor pendelt quasi um die Vorgesteuerte Position. Um deine Regelung beurteilen zu können müsstest du eine Drehzahl einregeln. Natürlich mit positionserfassung. Wenn du eine Sinus svpwm machen willst und die an einem bldc für Blockkommutierung testen willst hast du kein konstantes Moment und die regelung des q Stromes hat Viel zu tun. Prinzipiell macht das aber nichts.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.