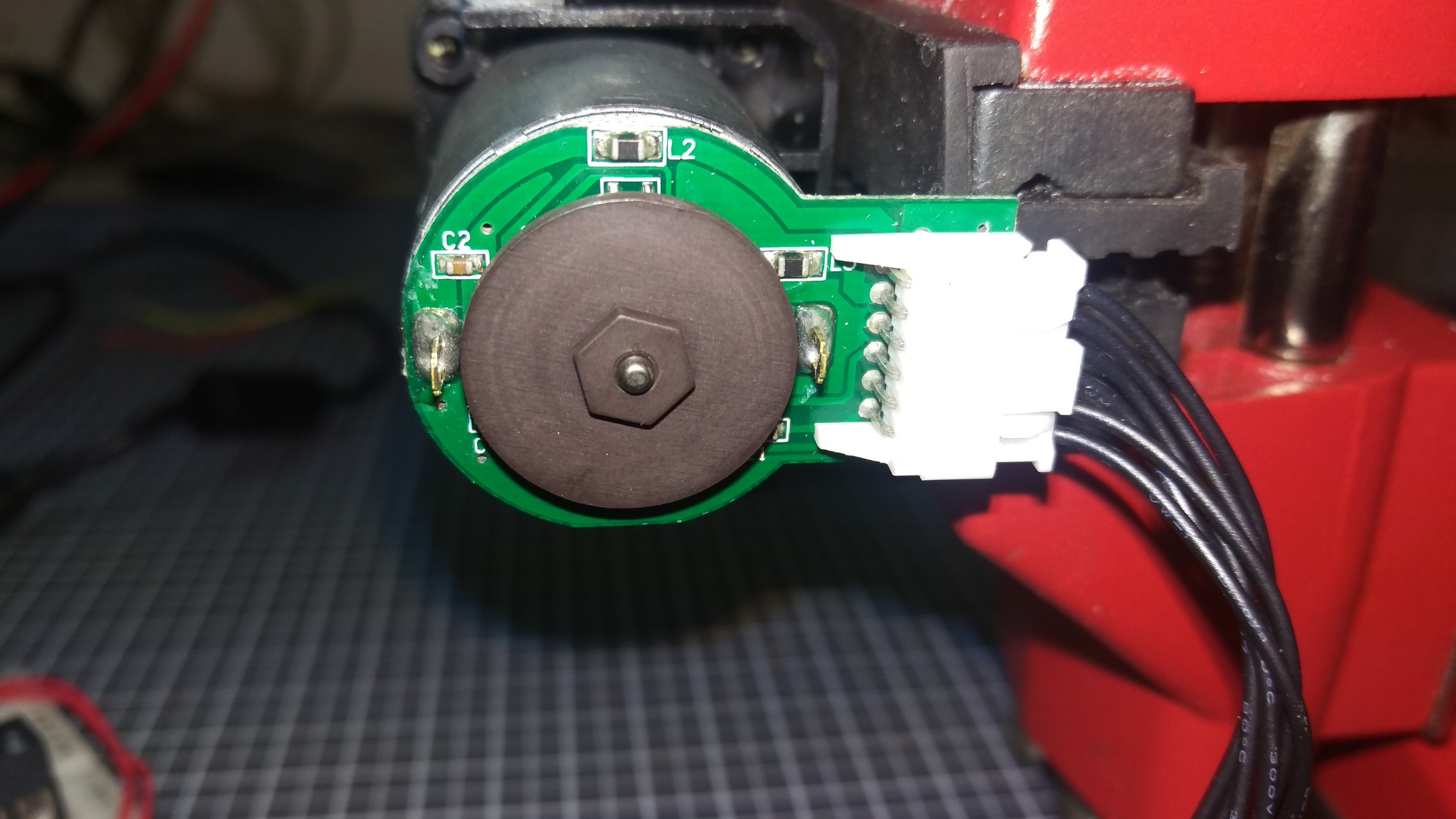
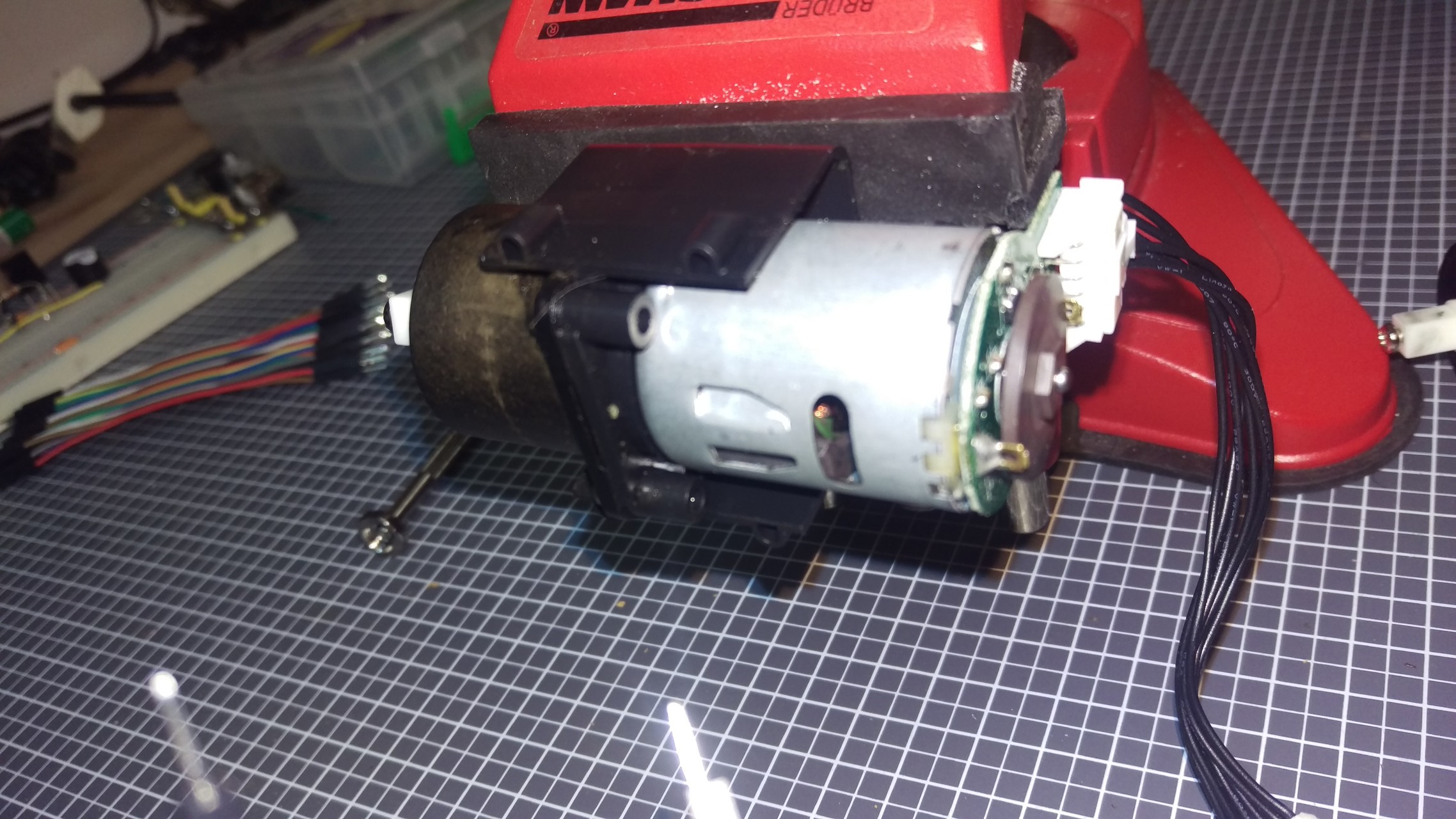
Hallo, möchte meinen DirtDevil Staubsaugroboter etwas umbauen. Der Staub wird neu von einem iRobot entfernt. Auf den DirtDevil wird ein RaspberryPi verbaut, inkl. WLAN und Kamera um den Bot fernzusteuern über ein Smartphone. Allerdings habe ich schon Probleme den Motor mit einem ATMega bzw Arduino anzusteuern. ESC Regler aus dem Modellbau schaffen es auch nicht den Motor richtig anspringen zu lassen...Habt ihr eine Idee wie diese angesteuert werden? Der Motor hat im ganzen 6 Pins, wobei 1-3 wahrscheinlich für die "Phasen" sind...Pin 4 von oben ist auf dem PCB vom Staubsauber nicht verbunden und Pin 5 auf dem Motor nicht verbunden. Gehe davon aus, dass Pin 6 ein Sensor ist? Vielen Dank für eure Hilfe und liebe Grüsse Christian
Angehängte Dateien:
-

IMAG0005.jpg
340 KB -

IMAG0006.jpg
500 KB
Chrigu M. schrieb: > Der Motor hat im ganzen 6 Pins, wobei 1-3 wahrscheinlich für die > "Phasen" sind... Das Ding sieht nach einem Gleichstrommotor aus, wie sie gerne im Modellbau verwendet werden. Das nehme ich aufgrund der beiden goldfarbenen Ösen, die durch die Platine gelötet sind, an. Die Ls und Cs sorgen für eine Funkentstörung des Bürstenmotors. > Pin 4 von oben ist auf dem PCB vom Staubsauber nicht > verbunden und Pin 5 auf dem Motor nicht verbunden. Gehe davon aus, dass > Pin 6 ein Sensor ist? Wenn da ein Sensor (Vermutlich um eine Blockade des Motors zu signalisieren) verbaut ist, dann müsste der zwei Anschlüsse haben. Die Scheibe könnte magnetisch sein, wodurch ein Reedkontakt oder vergleichbares pro Umdrehung (mehrmals) geschaltet wird.
Hallo, ja ich habe sollche Motoren auch noch hier zu liegen, das sind wie hier beschrieben http://www.exp-tech.de/robotik/servos-motoren/172-1-metall-getriebemotor-25dx56l-mm-mit-48-cpr-encoder Gleichstrommotoren mit Encoder mittels Magnetscheibe und Hallsensoren.. gruss Tom
Guten Tag Zusammen, vielen Dank für die Info. Sind tatsächlich Gleichstrommotoren. Sie drehen nun mit dem Arduino Vorwärts: Pin 1 = HIGH Pin 2 = LOW Pin 3 = LOW Rückwärts: Pin 1 = LOW Pin 2 = LOW Pin 3 = HIGH Danke euch und schöne Weihnachten :) Grüsse Christian
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.