Hallo, ich möchte gerne einen MEMS-Chip MPU6050 möglichst eben auf eine Lochrasterpl. befestigen. Bei der BreakoutPlatine sind zwei Löcher, wahrscheinlich für Schrauben. http://playground.arduino.cc/uploads/Main/mpu-6050.jpg Was für Schrauben muss ich da nehmen? Haben diese dann einen Abstandhalter zwischen Chip und Platine? gibt es ein Gegenstück(Mutter)? Muss durch die LR-Platine gebohrt werden? Hab bei Reichelt und Conrad nach Platinenzubehör oder ähnliches gesucht, bin aber leider nicht fündig geworden. Oder hab es nicht erkannt =) Schönes Neues Jahr! JohnC.
Ich würde mir darum garkeine Gedanken machen sondern das Bauteil direkt mit doppelseitigem Klebeband auf die Lochrasterplatine pappen. Natürlich kann man ihn auch mit passenden Schrauben und Abstandhaltern wieder auf die Lochrasterplatine pflanzen. Für erste Experimente sollte das vollkommen ausreichen. Spätestens wenn es um eine konkrete Anwendung geht, wird die MEMS-Platine dann sowieso entweder mechanisch möglichst direkt an den Rumpf eines Fluggerätes gekoppelt um keine Verzögerung durch Dämpfende Elemente zu bekommen oder bewusst gedämpft aufgehängt um Vibrationen zu filtern. Auf jeden Fall sollte eine Aufhängung des Sensors bei einer konkreten Anwendung möglichst definiert erfolgen um alle dämpfenden Parameter im Griff zu haben. Eine wie auch immer geartete Befestigung auf einer selbst mit schwingenden und ausserdem noch dämpfenden Lochrasterplatine ist da eher kontraproduktiv. Frank
John C. D. schrieb: > ich möchte gerne einen MEMS-Chip MPU6050 möglichst eben auf eine > Lochrasterpl. befestigen Brauchst du nicht! Nach der Montage macht man eine Kalibrierung und speichert den Offset.
Marc H. schrieb: > Brauchst du nicht! Nach der Montage macht man eine Kalibrierung und > speichert den Offset. Da ist mehr wie ein Offset fällig, das ist eine richtige Koordinatentransformation. Die frisst Rechenleistung...
@Marc Horby: Genau um die Kalibrierung geht es mir =) Der Chip sollte ja so eben wie möglich ausgerichtet sein und dafür wollte ich ihn auf eine LRP befestigen auf der eine kleine Kamerawasserwaage befestigt ist. So etwas in der Art: http://www.amazon.de/COM-FOUR%C2%AE-Kamera-Blitzschuhabdeckung-schwarz-Wasserwaage/dp/B00KS10XSA/ref=pd_cp_421_2?ie=UTF8&refRID=01BX6NTQRMM9GWPD92ZS Diese kommt dann auf eine kardanische Aufhängung. Nicht optimal, aber für etwas besseres reichen meine Mittel nicht =) @Frank B.: An Klebeband hatte ich auch schon gedacht. Ich kenne aber nur etwas dickeres Klebeband und da wäre es möglicherweise nicht gleichmäßig auf der Platine befestigt. Die Anwendung ist das Testen der Orientierungseigenschaften von dem Chip. Das heißt (zunächst), Orientierung ohne dynamische Beschleunigungen messen. Und dafür muss ich es möglichst eben befestigen, damit ich die Ausrichtung der LRP messen kann. Ich guck mal im Schreibladen oder Hobbyladen, vllt haben die dünnes Klebeband. Muss dann alles neu löten ;-P
@Schreiber(Gast): Rechenleistung ist kein Problem. Denkst du an etwas bestimmtes, was die Kalibrierung angeht? Wollte eigentlich ganz klassisch zunächst messen und mitteln. Wenn der Offset da schon nicht stimmt, dann basieren die Transformationen alle schon auf das falsche Referenzsystem. Vor allem, wenn ich meine Berechnungen mit den Accelerometern stützen möchte.
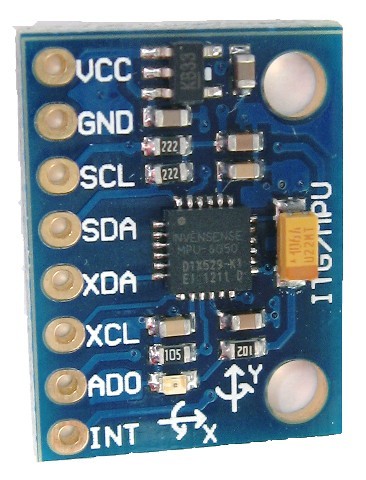
Die Befestigungslöcher auf der Platine haben 3 mm Durchmesser.
:
Bearbeitet durch User
John C. D. schrieb: > Wollte eigentlich ganz klassisch zunächst messen und mitteln. Wenn der > Offset > da schon nicht stimmt, dann basieren die Transformationen alle schon auf > das falsche Referenzsystem. Vor allem, wenn ich meine Berechnungen mit > den Accelerometern stützen möchte. Es geht nicht nur um den Offset, denke mal darüber nach, was jeder der Beschleunigungssensoren anzeigt 1) wenn die Platine wagerecht auf dem Tisch liegt 2) wenn die Platine um eine Achse um 45° geneigt wird 3) wenn die Platine zusätzlich noch in einer anderen Achse um 45° geneigt wird Tipp: Die Erdgeschleunigung ist immer genau 1g, die Summe der Messwerte aller drei Sensoren auch, aber nur wenn man vektoriell addiert.
Mir geht es hier wirklich erstmal um die Offsets. Eine Transformation macht erst Sinn, wenn ich ein Referenzsystem habe. Das kann ich aber nur bestimmen, wenn ich eine definierte Ausgangslage habe. Und die ist in meinem Fall die orthogonale Ausrichtung des Chips zur Gravitation. Die Filterung und Transformationen stehen schon.
John C. D. schrieb: > Die Anwendung ist das Testen der Orientierungseigenschaften von dem > Chip. Das heißt (zunächst), Orientierung ohne dynamische > Beschleunigungen messen. In dem Fall würde ich das Sensormodul erst einmal abgesetzt von der Hauptplatine auf eine etwas massivere Acrylglasplatte schauben. Mit den vorhandenen Befestigungsbohrungen geht das ja recht einfach. Gewinde in die Acrylplatte bohren ist ja kein Hexenwerk. Dann kann man das Ganze nachher ordentlich mit einer Wasserwaage ausrichten und sicher sein, das man genau bei null anfängt zu messen. Frank
Angehängte Dateien:
-

mpu-6050.jpg
58 KB
{kind=link}
Uhu U. schrieb: > Die Befestigungslöcher auf der Platine haben 3 mm Durchmesser. Frank B. schrieb: > In dem Fall würde ich das Sensormodul erst einmal abgesetzt von der > Hauptplatine auf eine etwas massivere Acrylglasplatte schauben. > Mit den vorhandenen Befestigungsbohrungen geht das ja recht einfach. Hat sich eigentlich mal einer das Foto des Moduls genauer angesehen? Der Typ, der das Layout verbrochen hat, gehört geohrfeigt. Der Kerko ist bestimmt keinen Millimeter vom oberen Loch entfernt, der Widerstand mitsamt der zugehörigen Leiterbahn immerhin geschätzt einen Millimeter vom unteren Loch entfernt. Da kann man bestenfalls mit M2,5 Senkkopfschrauben (am besten aus Kunststoff) arbeiten!
Magnus M. schrieb: > Uhu U. schrieb: >> Die Befestigungslöcher auf der Platine haben 3 mm Durchmesser. > > Frank B. schrieb: >> In dem Fall würde ich das Sensormodul erst einmal abgesetzt von der >> Hauptplatine auf eine etwas massivere Acrylglasplatte schauben. >> Mit den vorhandenen Befestigungsbohrungen geht das ja recht einfach. > > Hat sich eigentlich mal einer das Foto des Moduls genauer angesehen? Der > Typ, der das Layout verbrochen hat, gehört geohrfeigt. Der Kerko ist > bestimmt keinen Millimeter vom oberen Loch entfernt, der Widerstand > mitsamt der zugehörigen Leiterbahn immerhin geschätzt einen Millimeter > vom unteren Loch entfernt. Da kann man bestenfalls mit M2,5 > Senkkopfschrauben (am besten aus Kunststoff) arbeiten! Es wäre aber auch möglich das die Löcher nur für einen Arretierungsstift dienen sollen, wer weiß für welchen Zweck ein Chinese das Board designed hat...
Magnus M. schrieb: > Da kann man bestenfalls mit M2,5 Senkkopfschrauben (am besten aus > Kunststoff) arbeiten! Ich hab hier zwei von den Dingern auf dem Tisch liegen. Ich frage mich schon länger, wozu man auf dem Platinchen zwei so monstöse Löcher braucht - eins würde für 10 solche Dinger ausreichen... > Der Typ, der das Layout verbrochen hat, gehört geohrfeigt. Er scheint geohrfeigt worden zu sein: bei meinen ist das Layout leicht geändert: der Kondensator am Loch ist nicht mehr vorhanden, auch keine Pads dafür. Dafür haben sie neben dem Spannungsregler eine Lötbrücke gesetzt, die den Regler überbrückt, falls das Teil mit 3,3 V betrieben werden soll.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.