Hi zusammen, ich habe mal meine alte DOSen-Software ausgegraben (China-Schieber an Parort) und das nun fuer PICs (18F14k50) umgebaut. Das Ding kann z.Zt. einen einzelnen Schieber mit Strom versorgen, auslesen und via seriellem Output an den PC schicken. Wenn Interesse besteht, dann koennte ich die Software bei gleicher Hardware auf 5 Schieber erweitern. Der PIC bezieht seinen Strom aus dem USB-Port und benoetigt keine externen Bauteile. Die Ausgabe ist ASCII mit 2 Nachkommastellen. 0000000140.36 0000000140.37 0000000140.36 Gibts dafuer einen Bedarf? Falls Interesse besteht, einfach hier posten. Denn anmelden kann ich mich derzeit nicht. Munter bleiben Wicki
Mich würde eher ein Link zu den billig China Messchiebern interessieren. Oder Produktbezeichnungen (Futter für Google) (Bin nix PIC User, sondern Arduino Fan)
wicki schrieb: > Gibts dafuer einen Bedarf? Im Prinzip ja. Das Problem der verbreiteten Schaltungen ist ja, dass sie nicht mit dem Messschieber laufen den man hat, nicht so viele unterstützt wie man braucht, nicht mit dem uC aufgebaut ist für den man ein Programmiergerät hat, und nicht mit der Software zusammenarbeiten, die man für die CNC verwendet, und daher blödereeise nicht 1:1 passt. Und zur Anpassung fehlen Mechanikern die Kenntnisse. Allerdings sehr ich nicht den Vorteil deiner Lösung. Der uC ist exotisch, die (serielle USB) Weitrrleitung endet im Nirvana. Niemand lässt dafür ein WinTerm laufen. Es müsste wenigstens ein Porgramm für Windows und/oder Linux her, was die Anzeige auf dem Bildschirm bildschirmfüllend mit Achsenbezeichnungen und winzigklein always on top kann, und ein Mach3/emc2 Integration die die Werte dort in der Oberfläche anzeigt. Dinge wie Vorzeichenwechsel und *2 und addieren von Achsen sollte auch unterstützt werden.
MaWin schrieb: > Das Problem der verbreiteten Schaltungen ist ja, dass sie nicht mit dem > Messschieber laufen den man hat, nicht so viele unterstützt wie man > braucht, nicht mit dem uC aufgebaut ist für den man ein Programmiergerät > hat, und nicht mit der Software zusammenarbeiten, die man für die CNC > verwendet, und daher blödereeise nicht 1:1 passt. Und zur Anpassung > fehlen Mechanikern die Kenntnisse. ich habe bislang nur die mit 2x24-bit Protokoll gefunden. Wenn jemand einen anderen hat, dann wuerde ich versuchen, auch den zum laufen zu bekommen. In meinem PIC steckt ein Bootloader, mit dem man den PIC selbst programmieren kann - ohne Programmiergeraet. Also waeren eigene Erweiterungen moeglich. > Niemand lässt dafür ein WinTerm laufen. Es müsste wenigstens ein > Porgramm für Windows und/oder Linux her, was die Anzeige auf dem > Bildschirm bildschirmfüllend mit Achsenbezeichnungen und winzigklein > always on top kann, und ein Mach3/emc2 Integration die die Werte > dort in der Oberfläche anzeigt. das ist doch relativer Kinderkram... "cat /dev/ttyUSB" in einem X-term mit gewuenscher Schriftart und -groesse ist die simpelste aller Loesungen. Man koennte auch in Java oder Python was basteln. Ich wuerde das in EMC2 integrieren wollen - das System ist ja ziemlich offen. Die Frage ist: braucht das wer? > Dinge wie Vorzeichenwechsel und *2 und addieren von Achsen sollte auch > unterstützt werden. Das waere der naechste Schritt. Ein Billigschieber kann nur 150mm. Der PIC koennte 2 (oder auch mehr) verketten. Und man kann dann 300 oder 450mm messen. Allerdings fuer den Preis der Verdrei- oder -vierfachung des Messfehlers.... Will man das? Und dann noch die Frage des "mehrere Schieber an einem PIC": Ganz billig ist die Loesung des sequenziellen Lesens aller Schieber. Dann gibts aber nur etwa 1 Messwert pro Sekunde. Mehr Aufwand ist das parallele Lesen aller angeschlossenen Schieber. Trotzdem kommen die Werte fuer eine Echtzeitsteuerung von Fraesen oder Lathen eigentlich zu langsam (meine Schieber produzieren etwa 3 Werte/Sekunde).
wicki schrieb: > ich habe bislang nur die mit 2x24-bit Protokoll gefunden. > Wenn jemand einen anderen hat, dann wuerde ich versuchen, auch den zum > laufen zu bekommen. Das 6x 4-Bit Protokoll ist ebenfalls weit verbreitet. Beitrag "10stelliges 7-Segment DRO für WABECO Messschieber" Beitrag "Messchieber auslesen - unbekanntes Protokoll"
Thomas F. schrieb: > Das 6x 4-Bit Protokoll ist ebenfalls weit verbreitet. haben alle WABECOS dieses Protokoll? Dann wuerde ich einen zum testen bestellen. (denn noch einen 2x24bit brauch ich nicht)
wicki schrieb: > haben alle WABECOS dieses Protokoll? Ich habe im Jahre 2009 3 Anbaumessschieber für meine Fräsmaschine bei WABECO gekauft. Dazu verwende ich die Schieblehrenanzeige "SLA 1" von ELV (in der Zeitschrift "Maschinen im Modellbau" gab es einen Artikel, in dem stand, dass Messschieber und Anzeige zusammen passen), und es funktioniert. Das Protokoll ist beim "SLA 1" beschrieben: siehe Anhang. Da bei WABECO bei allen Messschiebern kein Hinweis über das Protokoll steht, nehme ich doch an, dass alle gleich sind. Ob die Glasmaßstäbe auch dieses Protokoll haben, kann ich nicht sagen. Gruß Dietrich
wicki schrieb: > Trotzdem kommen die Werte fuer eine Echtzeitsteuerung von Fraesen > oder Lathen eigentlich zu langsam (meine Schieber produzieren etwa > 3 Werte/Sekunde). Ja, dafür würde ich es auch nicht nutzen wollen. Die Datagramme kommen: 2*24 Normal Mode alle 350ms fastmode alle 20ms 6*4 alle 110ms Ich hab mir ne Anzeige gebastelt die PSoC /ARM verwendet. Ich lese 3 Kanäle simultan in voller Geschwindigkeit, auch im 2*24 Fastmode. Die Unterschiede in der Datagramm-Folge/Länge benutze ich auch zur automatischen Protokollerkennung. In letzter Zeit (2015) sind mir eigentlich nur noch Messschieber mit 6*4 Protokoll untergekommen Aldi/Lidl/Norma/China/Webaco-Anbaumessschieber 6*4 solltest du also unbedingt implementieren. Ob du mit dem Pic das auch simultan hinbekommst, kann ich nicht beurteilen. Mit dem M0@24MHz war es kein Problem Reiner
Danke fuer die Hinweise. Reiner W. schrieb: > Normal Mode alle 350ms > fastmode alle 20ms Aber wie bekomme ich das Ding in den fast-Mode? Als Tasten haben die nur "mm/inch", "zero" und "ON/off" iIgendwo hatte ich mal was dazu gelesen - aber ich finds nicht mehr wieder. > 6*4 alle 110ms und ich hab noch 2 etwas neuere "kraft" Messer (norma? penny?) die habe ich noch nicht getestet- vielleicht sind die 6*4
Angehängte Dateien:
-

ZD_Sylvac.png
62 KB
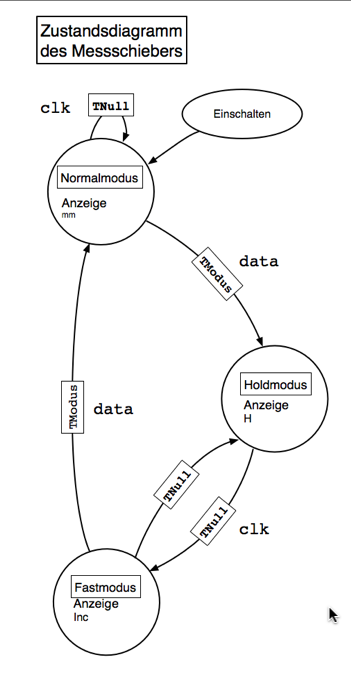
wicki schrieb: > Aber wie bekomme ich das Ding in den fast-Mode? Kann ich dir für deinen Messschieber auch nicht sagen. Meine Exemplare haben eine Modus-Taste. Kombiniert mit der Null-Taste kommt man damit in den Fastmode. Per uC kann man die Null-Taste durch 300ms High (1,5V) an der clk-Leitung erreichen und die Mode-Taste durch 300ms an der data Leitung. Du kannst ja mal versuchen, ob das bei deinen Modellen auch funktioniert. Anbei mein Zustandsdiagramm für die Messschieber. Den Fastmode erreichst du also durch einen Impuls auf der Data-Leitung gefolgt von einen Impuls auf der clk-Leitung. (Geht also über den Hold-Mode) Zurück kommst du mit einem Impuls auf der Data-Leitung. Achtung das hier gesagte gilt NUR für die 2*24bit Variante. Und ich kann auch nicht garantieren, dass das bei dir auch so geht;-) mir sind mindestens 3 verschiedene Bedienungen (SMs) für die alten 2*24er bekannt. Deshalb hab ich auch meine eigene SM drübergesetzt, die dann allgemein bei allen Messschiebern (2*24, 6*4) gleich funktioniert. Statt der eingebauten Holdmodi (falls vorhanden) verwende ich eigene Software-Hold-Modi. wicki schrieb: > und ich hab noch 2 etwas neuere "kraft" Messer (norma? penny?) > die habe ich noch nicht getestet- vielleicht sind die 6*4 Häng sie halt an einen Oszi. Reiner
wicki schrieb: > Die Frage ist: braucht das wer? Ja, wozu braucht er sonst Messchieber, wenn er sie nicht sehen kann ? Wenigstens sehen wenn er die Maschine manuell bedient möglichst gross und deutlich, der nächste (und sinnvolle) Schritt ist in der CNC zugreifbar haben. Ein Beispiel für Messchieber: Abgleich Schritte vs. reale Position. Willst du das per Hand machen ? Man schreibt einen G-Code Skript, der bis zu einem Sollwert läuft. Dazu muss man auf den Messchieberwert von der CNC aus zugreifen können. Oder man vermisst den Tisch, ob alle 1cm per Steppermotor auch wirklich 1.000cm erreicht werden, und wie gross das Umkehrspiel ist. Willst du 5000 Werte per Hand aufschreiben und abgleichen ? Das macht ein Skript, und dazu muss es, oh Wunder, auf die Messschieberwerte zugreifen könne. Und wenn du das nur für EMC2 zeigst wie es geht, werden die Mach3 Leute deine Messschiebersoftware gar nicht erst probieren.
Reiner W. schrieb: > Du kannst ja mal versuchen, ob das bei deinen Modellen auch > funktioniert. jau! Danke - das klappt auch bei meinem. Und ich habe einen gefunden, der offensichtlich das 6x4 Bit faehrt. Der Schieber sieht optisch genauso aus wie die anderen. Sollte eigentlich kein Problem sein, den ebenfalls zu lesen. Die Anschlussbelegung der Kontaktleiste ist identisch: + Clock Data - mal basteln.....
Vollzug! 6x4 Bit geht auch ;-) Dabei kommen die Werte dann aber quasi als echter Zahlenwert. Bei dem 2x24 muss ich den 24-Bit Wert noch umrechnen (durch 1612 teilen), um auf den Messwert zu kommen. Nun waere noch eine automatische Protokollerkennung wuenschenswert. Ebenso die parallele Bearbeitung mehrerer Schieber. Aber ich hab ja noch ein paar kb Platz ;-) Bekommt man eigentlich irgendwo Stecker, die in den Anschluss passen? Man muesste eigentlich einfach was aus einer kupferbeschichteten Leiterplatte fraesen koennen und mit einem kleinen Federchen auf die Anschluesse pressen.
Angehängte Dateien:
-

AutoProtokol1.png
78 KB -

AutoProtokol2.png
100 KB -

JST.png
160 KB
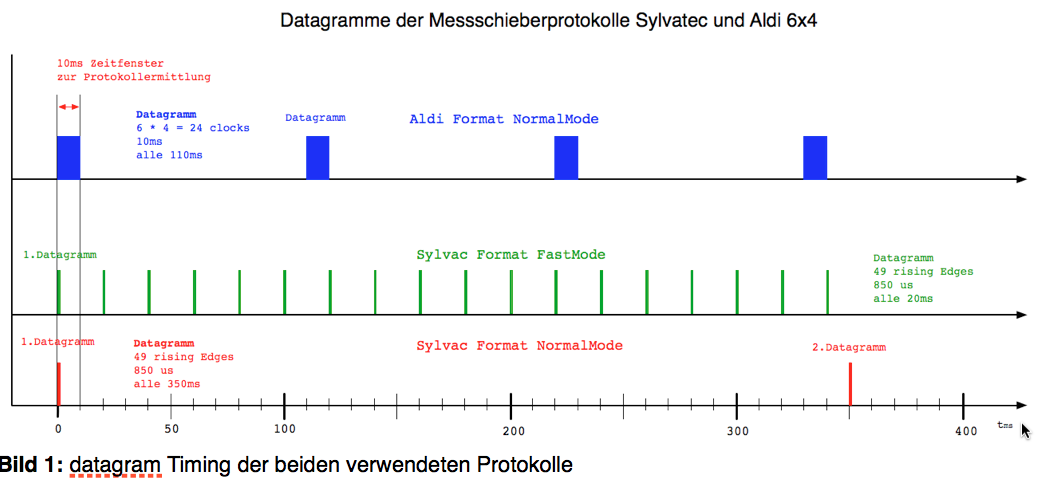
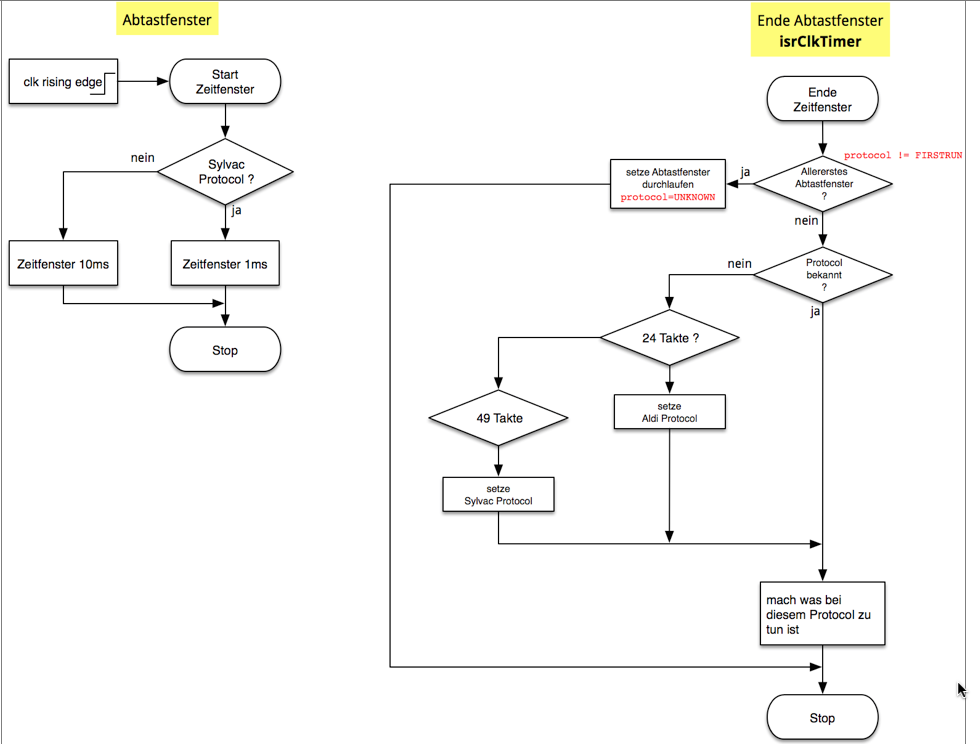

wicki schrieb: > Nun waere noch eine automatische Protokollerkennung wuenschenswert. Hängt natürlich von deinem Algorithmus ab. Ich verwende ein Abtastfenster für das Datagramm. Da definiert sich das Protokoll aus clk-Impulse innerhalb einer bestimmten Abtastlänge. Bei den beiden Protokollen 24*4(SYLVAC) und 6*4 (Aldi) reicht das, weil es da keine Überschneidungen gibt. (siehe Bild1) Die Protokollermittlung mache ich dann während jedem datagram. Das klapp dann natürlich auch, wenn im laufenden Betrieb umgesteckt wird;-) Bild 2 Zeigt das Vorgehen. Beim Einschalten (oder auch nach mehreren Fehlern - dann wurde umgesteckt) bekommt jeder Messschieber das Protokoll FIRSTRUN zugewiesen, wird also nicht ausgewertet. Das ist nötig, da beim Einschalten ja der Messschieber sich innerhalb eines datagrams befinden kann und die gezählten Restimpulse genau einem anderen Protokoll entsprechen könnte. Ab dem 2. datagramm wird das Protokoll dann ermittelt. wicki schrieb: > Bekommt man eigentlich irgendwo Stecker, die in den Anschluss passen? Also ich kenne zumindest Messschieber mit MINI-USB und solche, die zumindest einen Footprint für Mini-USB drauf haben. Einige Anbieter vertreiben auch direkt passenden Kabel für den 0815-Messschieber. (Must du gurgeln, hab grad keinen zur Hand) Ich selber verwende inzwischen JST siehe Bild3 (falls unbedingt Stecker sein muss). Die bekommst die preiswert bei den üblichen Kandidaten. wicki schrieb: > Man muesste eigentlich einfach was aus einer kupferbeschichteten > Leiterplatte fraesen koennen und mit einem kleinen Federchen auf Würde ich nicht unbedingt empfehlen. Die meisten Probleme hatte ich bisher mit Steckverbindungen, zumal der Einsatzort ja i.d.R. nicht der Sauberste ist. Ich rate zu löten und versiegeln. Reiner
Reiner W. schrieb: >> Man muesste eigentlich einfach was aus einer kupferbeschichteten >> Leiterplatte fraesen koennen und mit einem kleinen Federchen auf > > Würde ich nicht unbedingt empfehlen. Ist auch meine Erfahrung: Mit selbstgefrästen Kontakten hatte ich immer Wackelkontakte. Ich habe dann die Leitungen direkt angelötet und durch eine Bohrung im Deckel durchgeführt.
Reiner W. schrieb: > zumal der Einsatzort ja i.d.R. nicht der > Sauberste ist. > Ich rate zu löten und versiegeln. ja - das ist n Argument... Nun mal was anderes: wie macht Ihr das mit der galvanischen Trennung? Die Schieber jetzt einfach auf die Fraese aufschrauben oder mit isolierter Halterung? Die, die ich hier habe, haben zwar alle dem "+" als Masse, aber a) ist das ja nicht wirklich schoen b) kann man sich u.U. nicht darauf verlassen, dass das immer so ist c) lasse ich die Schieber momentan gegen ein vom PIC erzeugtes "schwebendes -" laufen. Ein also irgendwo zwischen 1 und 3 Volt angesiedeltes Potenzial Insbesondere "c" ist nicht wirklich aesthetisch, bringt aber den Verzicht auf jede Art von zusaetzlichem Bauteil. Wie seht Ihr das ? Munter bleiben Wicki
Angehängte Dateien:
-

Eingang_1.png
140 KB
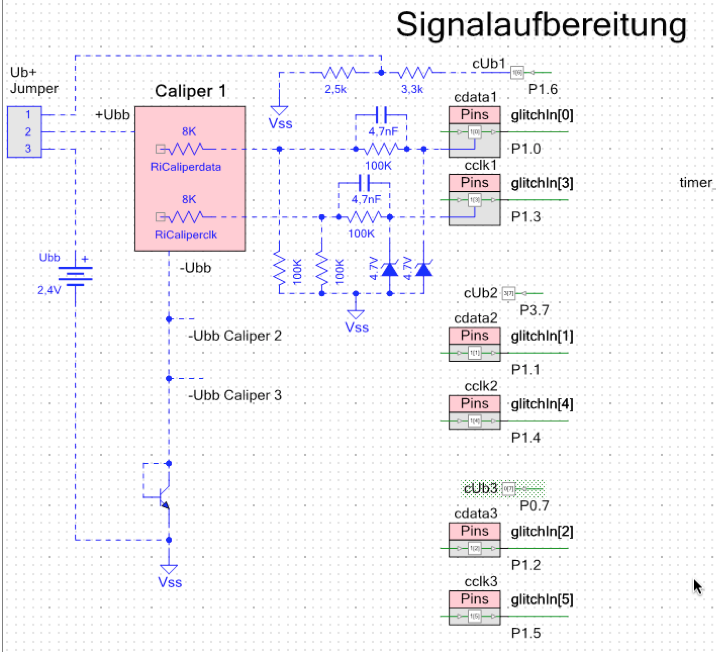
Wicki W. schrieb: > Nun mal was anderes: wie macht Ihr das mit der galvanischen Trennung? Ich hab mal eine Variante mit Digital Isolatoren Si8420 getestet, das ging perfekt. Habt sie dann allerdings in der V1.0 nicht verwendet. Das ist etwas aufwendiger, weil die Dinger nicht bidirektional arbeiten und auf der data/clk Leitung ja auch geschalten werden muss. In der nächsten Version will ich das aber so machen. Derzeit mach ich das höchst unprofessionell etwa nach c) Die Versorgungsspannung stelle ich direkt mit einem Pin vom uC pro Messschieber zur Verfügung. Damit ist es einfach, die 6x4 Schieber zu nullen. Dabei wird die Spannung dann für ca. 100ms unterbrochen. Einen Fastmode kennen die ja nicht. Der Nullpegel der Schieber wird mit einem Transistor auf 0,7V angehoben. Damit liegt der Ausgangspegel der Schieber dann im TTL Bereich und kann direkt gekoppelt werden. Auf die Z-Dioden hab ich dann auch noch verzichtet, da reichen mir die im PSoC Chip integrierten (in V1.0). Die data/clk Pins werden bidirektional betrieben, deshalb der Spannungsteiler am Eingang. Die beiden C's sorgen dann wieder für eine ordentliche Impulsqualität. ACHTUNG! Diese Version darf nur eingesetzt werden, wenn alle 3 Schieber gleiches Messepotential (+/-) haben oder sicher isoliert montiert sind. Und die Masse der Auswerteelektronik muss natürlich auch isoliert sein. Bei der Spannungsversorgung mit einem Innenwiderstand von 3,3k passiert allerdings im Kurzschlussfall (Messschieber unterschiedliches Messepotential und nicht isoliert) nicht wirklich was;-) Bei mir arbeitet die Variante an einer großen Fräse bei 3 2x24bit Schieber und ca. 2m Kabellänge am Schieber, seit ca. 6 Monaten ohne Problem Die Variante ist zwar recht preiswert und tuts auch, aber professionell geht anders;-) Wicki W. schrieb: > b) kann man sich u.U. nicht darauf verlassen, dass das immer so ist Ich hab beide Versionen, was ich erst bemerkt habe, als ich verzweifelt nach dem Kurzschluss gesucht habe;-)
Wicki W. schrieb: > Die Schieber jetzt einfach auf die Fraese aufschrauben oder > mit isolierter Halterung? Meine drei Messschieber sind metallisch fest verschraubt, also über die Maschine auf PE-Potential. Versorgungsspannung kommt aus einem alten PC-Netzteil. Bisher keinerlei Probleme.
Hi nochmal, also so wie es aussieht, ist es wohl kaum machbar, mit einem PIC (16MHz interner IRC) mehrere Schieber simultan auszulesen. Zumindest bei den 2x24-Protokollen. Ich muss mit hoechstens 5uSec abtasten und auswerten und dafuer habe ich in der Zeit nicht genug Befehle zur Verfuegung. Und um einen kompletten Bitstream vom 5 Schiebern abzuspeichern und diesen dann spaeter auszuwerten - dafuer fehlt mir der Platz. Also muss ich es entweder: a) sequenziell oder b) mit mehreren PICs oder c) mit externem OSC und hoeherem Takt lesen Mit "c" muesste es gehen - waere aber mit Softwareaufwand und -optimierung verbunden. (10 Eingaenge innerhalb vom 5 uSec abfragen und die Ergebnisse verwertbar abspeichern - das koennte auch bei 48Mhz eng werden) "b" waere Hard- und Softwareaufwand. Aber beliebig skalierbar. "a" reduziert die Zahl der pro Sekunde auswertbaren Messwerte. (statt 50/Sekunde waren es dann nur noch ca. 10) Und nun weiss ich nicht so recht, was ich nun bevorzugen soll. Oder habe ich irgendwo n Denkfehler da drin? Munter bleiben Wicki
Wicki W. schrieb: > Ich muss mit hoechstens 5uSec abtasten und auswerten und dafuer > habe ich in der Zeit nicht genug Befehle zur Verfuegung. Wie sieht denn dein Algorithmus aus? Ich löse bei jedem clk einen IR aus und in der ISR schreib ich die date-leitung dann weg. Da ist die ISR dann extrem kurz. Beim 2*24 sind's ja nur ca. 70kHz Reiner
Reiner W. schrieb: > Wie sieht denn dein Algorithmus aus? Ich löse bei jedem clk einen IR aus hmmm.... klar.... interessanter Ansatz. Interrupt on change hatte ich irgendwie voellig verdraengt. Bei 5 Schiebern koennen ja theoretisch 5 IRs gleichzeitig auftreten. Das duerfte auch recht komplex werden - denn jeder kann ja gerade an einer anderen Stelle in seinem Protkoll haengen. Aber es ist wert mal drueber nachzudenken.
Wicki W. schrieb: > Oder habe ich irgendwo n Denkfehler da drin? Obwohl es sicherlich auch ein PIC schafft, kann ein Design, das pro Messschieber einen uC verwendet, ja sinnvoll sein, wenn man die Platine so aufbaut, daß davon mehrere nebeneinander anordnungsbar sind, und ihre Daten über möglichst nur ein USB Port zum PC (Mach3 etc.) transportieren können, also von uC zu uC reichen bis zum uC der das USB bedient. Und du wolltest gar keine Anzeige, so wie ich dich verstand.
Michael B. schrieb: > Obwohl es sicherlich auch ein PIC schafft, das mit dem einen PIC, das frage ich mich ja grade, ob das wohl wirklich geht. Es soll absolut minimalistisch sein. Also ohne externe Bauteile. Ich muss moeglichst ein Abtastraster von 5 uSec einhalten und der PIC ist mit 16 MHz getaktet (sonst brauch ich einen Quarz). Also habe ich 16*5/4=20 Befehle zur Verfuegung - so grob gerundet. Mit diesen 20 Befehlen muss ich 5 Taktleitungen testen, den Status des Protokolls abfragen und den Datenleitungsstatus zur Auswertung abspeichern. Das klingt verdammt knapp....
Angehängte Dateien:
-

Auszug_Sylvac.png
24 KB

Wicki W. schrieb: > Ich muss moeglichst ein Abtastraster von 5 uSec einhalten und der PIC > ist Ich kenne zwar deinen konkreten Algorithmus nicht, da hast du noch nichts zu geschrieben. Und leider habe auch vom PIC keine Ahnung;-) aber das klingt fast so, als würdest du die Leitungen pollen. Damit hast du in der Tat bei dem 2*24 Protokoll keine Freude. Anbei ein Auszug aus dem Sylvac_Protokoll. Interessant sind die beiden letzten Zeilen, demnach ist die DatenLeitung nur +/- 1us an der steigenden clk-Flanke gültig. Und ich habe bei längeren Anschlussleitungen (ca. 2m) die Erfahrung gemacht, dass man sich da tunlichst dran halten sollte, weil die Signalqualität dann schon ziemlich schlecht ist. Das geht eigentlich sinnvoll nur noch mit einem IR an der steigenden clk-Flanke. Innerhalb der ISR brauchst du ja dann nur noch die data-leitung in ein Array schieben. Das sollte auch der Pic in 1us schaffen. Die Auswertung machst du dann nachdem das Abtastfenster abgelaufen ist. Selbst beim schnellsten Protokoll (2*24 Fastmode) hast du dann 20ms Zeit dafür. Selbst für den extrem unwahrscheinlichen Fall, dass bei 3 Messschiebern 2 clk-Impulse unterschiedlicher Messschieber exakt synchron sind, und eine ISR somit eine Verzögerung > 1us und die data-leitung nicht mehr korrekt gelesen werden könnte (hatte ich eigentlich noch nicht) na dann ist halt ein Datagramm falsch. Aber so schnell würde das dein Auge nicht mitbekommen;-) Du brauchst also pro Messschieber einen IR_on_rising_edge und evtl. einen zusätzlichen timer-IR, je nachdem, wie du das Abtastfenster realisiert. Also ich kann nur sagen, ich habe damit bei 3 Messschiebern simultan keine Probleme. Und ich kann mir auch nicht vorstellen, dass das der PIC nicht schaffen sollte. Aber der letzte Satz ohne Gewähr. Reiner
Reiner W. schrieb: > Also ich kann nur sagen, ich habe damit bei 3 Messschiebern simultan > keine Probleme. Und ich kann mir auch nicht vorstellen, dass das der PIC > nicht schaffen sollte. Aber der letzte Satz ohne Gewähr. ich wiederum kann sagen: mehr als ein Schieber wird mit einem pic 18f14k50 ohne Quarz schon ganz schoen eng. (simultan) Interrupt on edge gibt es nur 3, ICOs gibts zwar mehr, aber die Unterscheidung, welcher Pin und welcher Level uns welcher Status des Protokolls es ist - das braucht so viele Befehle, dass Interrupts verloren gehen. Insbesondere sind die IOCs der PICs auch nicht unproblematisch (http://www.xargs.com/pic/portb-change-bug.html). Also bin ich von der "ein-Pic-fuer-5-Schieber"-Loesung weg und baue nun eine skalierbare "ein-Pic-pro-Schieber"-Loesung. Bei 2 EUR/PIC ist das wohl wirtschaflicher..... ;-) Ich werde aber die "ein-Pic-liesst-5-Schieber-sequenziell"-Loesung auch mal testweise probieren.
http://www.fingers-welt.de/Postille/Ausgabe2/Postille_2015.pdf Hier, ab Seite 34 inkl. Signalaufbereitung, Link zum Quellcode im Text. Viele Grüße Paul
Angehängte Dateien:
{kind=link}
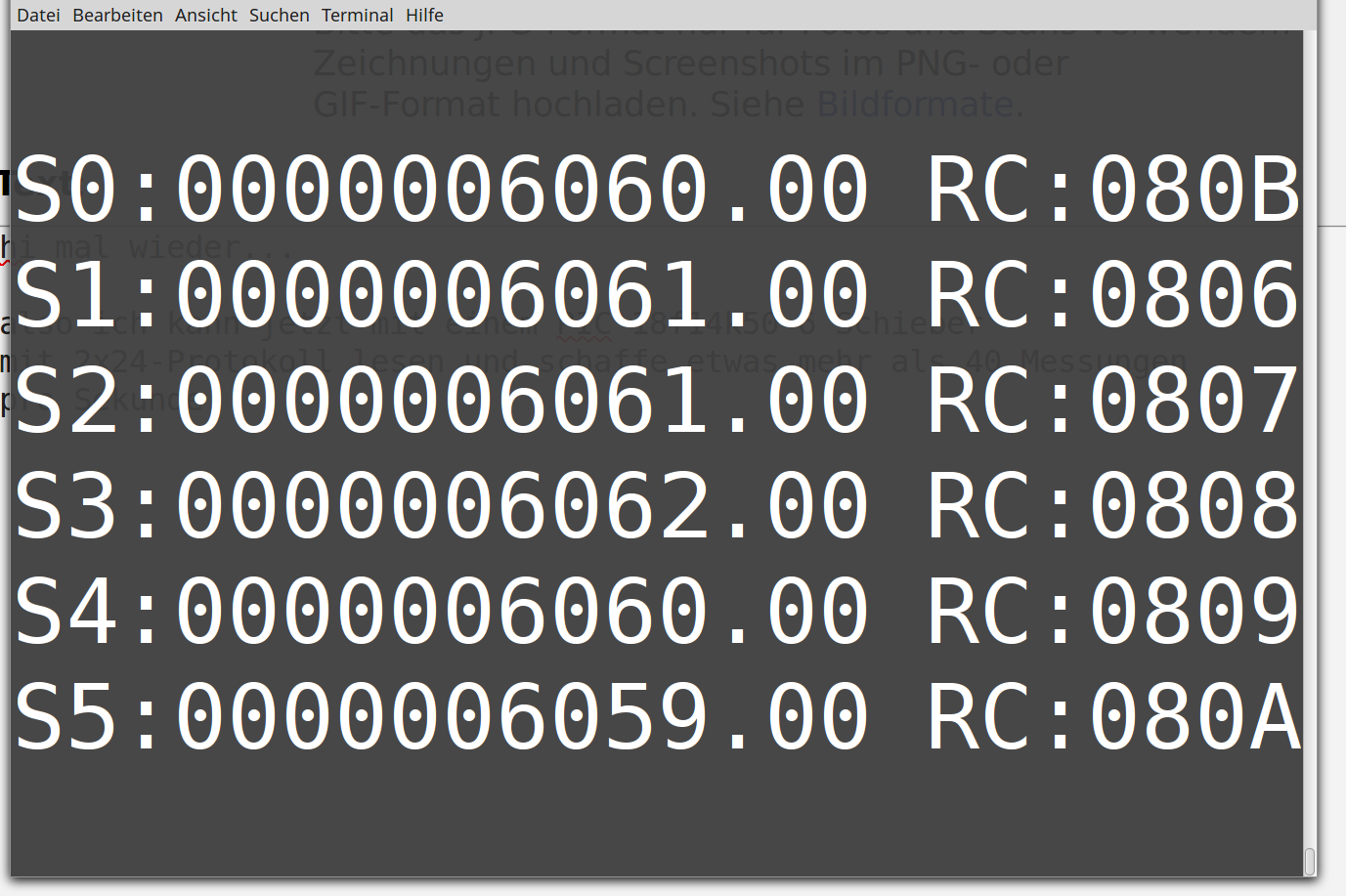
Hi mal wieder... also ich kann jetzt mit einem PIC 18f14k50 6 Schieber mit 2x24-Protokoll lesen und schaffe etwas mehr als 40 Messungen pro Sekunde. (also nicht ganz 10/Schieber/Sekunde) Die Daten werden als ANSI/ASCII-Stream mit 115200 Baud ausgeworfen, werden von einem 2303 nach USB umgesetzt und koennen z.B. in einem Terminalfenster in 98-Punkt-(oderwasauchimmer)-Schrift anzeigt werden. Nun muss ich noch das 6x4-Protokoll mit einbauen (laufen tuts ja schon) und dann mal testen, wie es mit 6 echten Schiebern gleichzeitig laeuft. (momentan simuliere ich alles mit einem einzigen Schieber) Es koennte dadurch u.U. schneller werden. Ausserdem sollte das noch skalierbar sein, weil der serielle Output abgeschaltet wird, wenn keine Daten gesendet werden. D.h.: auch 12, 18 oder 24 Schieber sollten ueber einen einzigen USB-Port gehen. Wenn sich nun noch ein Irrer findet, der das mal testen moechte: Einfach mailen.... munter bleiben wicki
Wicki W. schrieb: > momentan simuliere ich alles mit einem einzigen Schieber) Das ist aber Unsinn, weil 6 Schieber natürlich zeitlich versetzt ihren Takt und Startsignal senden. Das simultan auswerten musste 150ns pro Bit erfordern. Aber da man sowieso nicht 1500 Messwerte/Sekunde senden muss/kann, reicht es, einen nach dem anderen zu erfassen, dauert ja höchstens 1ms bis der jeweils abgehörte sendet.
Michael B. schrieb: >> momentan simuliere ich alles mit einem einzigen Schieber) > > Das ist aber Unsinn, weil 6 Schieber natürlich zeitlich versetzt ihren > Takt und Startsignal senden. Das simultan auswerten musste 150ns pro Bit > erfordern. Daher sagte ich ja: mit echten Schiebern sollte es etwas schneller werden, weil man ja momentan nicht mehr messen kann, als real Signale anliegen. Wenn aber in den Sendepausen von Schieber 0 die anderen senden, koennen diese Signale in der Zeit verarbeitet werden. Das teste ich aber noch aus. Simultan geht es mit dem PIC mit 16MHz definitiv nicht. Mit einem auf 64MHz bequarzten koennte es vielleicht klappen. Wuerde aber trotzdem sehr viel Codeoptimierung erfordern.
Wicki W. schrieb: > Daher sagte ich ja: mit echten Schiebern sollte es etwas schneller > werden, > weil man ja momentan nicht mehr messen kann, als real Signale anliegen. > Wenn aber in den Sendepausen von Schieber 0 die anderen senden, koennen > diese Signale in der Zeit verarbeitet werden. Ich weis ja nicht, wie dein Auslesealgorithmus aussieht, aber da du die Messschieber nicht veranlassen kannst synchron zu senden(jedenfalls wüsste ich nicht wie), müsstest du ja davon ausgehen, dass mehrere Schieber theoretisch zur selben Zeit senden. Das wird zumindest hin und wieder passieren, da die clk Frequenzen der einzelnen Schieber nicht exakt identisch und schon gar nicht besonders stabil sind. Also das ohne Interrupt zu beherrschen stelle ich mir schon recht schwierig vor. Hut ab, wenn du dass hinbekommst. Was das senden der Daten angeht, so wirst du hoffentlich nur senden, wenn sich der Wert eines Messschiebers geändert hat. Wenn du unbedingt ohne IR arbeiten musst/willst, würde ich das Konzept ein PIC, ein Messschieber sicher bevorzugen. Aber he, probiere es aus, da lernt man am meisten bei.
Michael B. schrieb: > Das simultan auswerten musste 150ns pro Bit > erfordern. Wie hast du da gerechnet ?
Reiner W. schrieb: > Also das ohne Interrupt zu beherrschen stelle ich mir schon recht > schwierig vor. Ist einfacher als mit IR. Ich schaue nach, ob eine Leitung laenger als x-uSec LOW ist. Ist sie es, dann ist sie in einer Telegrammpause und ich warte y-uSec auf den Start der Telegramms. Kommt es nicht, nehme ich die naechste Leitung. Daher sollte er mit mehreren Schiebern schneller werden, als wenn ich mit einem einzelnen sechs simuliere. > Was das senden der Daten angeht, so wirst du hoffentlich nur senden, > wenn sich der Wert eines Messschiebers geändert hat. Coole Idee ;-) Das Senden dauert zwar nur 3-4ms pro Schieber-Telegramm aber da ist tatsaechlich Optimierungspotenzial.... > Wenn du unbedingt ohne IR arbeiten musst/willst, würde ich das Konzept > ein PIC, ein Messschieber sicher bevorzugen. Fuers Senden der Daten, dafuer koennte eine IR-Routine was bringen. Dann haette ich die 4 ms auch noch zum Schieberdaten lesen zur Verfuegung. > Aber he, probiere es aus, da lernt man am meisten bei. jau - schaun wir mal.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.