
Hallo Gemeinde, ich bin am verzweifeln... Rein aus Interesse wollte ich gern den Temperaturverlauf über die Zeit für die Erwärmung vom DC-Motor (Wicklung, Gehäuse) berechnen und darstellen, evtl. erweitern auf Montagegehäuse I und II. Für den ersten Ansatz reicht es, wenn die Umgebung vom Motorgehäuse als konstant angenommen wird -> es gibt laut Datenblatt R_th für die Wicklung zu Gehäuse und R_th für Gehäuse zu Umgebung, sowie C_th für Wicklung und C_th für das Gehäuse. Jetzt habe ich mir die folgende Vorgehensweise überlegt (siehe Anhang). => Da meine Grundlagen E-Technik etwas länger her sind, habe ich nun das Problem der Bestimmung vom Ersatzwiderstand R_th und der Ersatzkapazität C_th! Könnt ihr mir erklären und aufzeigen, wie ich zu meinen "einfachen" R und C komme aus dem Ersatzschaltbild? Vielen Dank schon mal!!!
Angehängte Dateien:
-

Thermik.png
22 KB
Hans A. Zwick schrieb: > Könnt ihr mir erklären und aufzeigen, wie ich zu meinen "einfachen" R > und C komme aus dem Ersatzschaltbild? Für den stationären Fall gilt Rth=Rth1+Rth2, währed Cthx keine Rolle spielt. Ansonsten funktioniert eine Zusammenfassung nur für eine bestimmte Frequenz. Umwandlung Rth1 in Serie Cth2 -> Rth1p parallel Cth2p und dann zusammenfassen.
Danke für die Antwort. Die Frequenzabhängigkeit ist natürlich hinderlich, da ich ja auf den Zeitverlauf kommen möchte -> meine Heizquelle soll konstant sein, somit ist dort Frequenz = 0, also DC. Der stationäre Fall gibt mir doch eigentlich nur die Endtemperatur an, richtig? Wie komme ich also nun rechnerisch auf den Zeitverlauf???? Gruß, Hans
In der Vorlesung E-Antriebe hatten wir gelernt, dass man bei einfachen Anwendungen mit einem Wärmewiderstand und einer Wärmekapazität auskommt. (Das Verhalten ist dann analog zu einer einfachen RC-Aufladeschaltung.) Die Parameter lassen sich dann einigermassen bequem bestimmen, weil Temperaturmessungen nur an einer Stelle notwendig sind, z.B. am Gehäuse. (Das Verhalten ist analog zu einer einfachen RC-Aufladeschaltung.) Will man's genauer haben, muss man eben auch die Temperatur der Wicklung bestimmen (Sensor oder Widerstandsmessung der kurzzeitig stromlos gemachten Ankerwicklung) und die Werte der nunmehr komplizierteren "Ersatzschaltung" bestimmen.
Hallo Elektrofan, vielen Dank für deine Antwort. Wie in meinem Ursprungsbeitrag - etwas versteckt - zu lesen, sind im Datenblatt des Motors die beiden Wärmeübergangswiderstand und ~kapazität angegeben. Somit sind numersich die Werte vorhanden. Lediglich verstehe ich nicht, wie ich mit diesen Werten und einer konstanten Aussentemperatur auf die Wicklungstemperatur kommen soll... Ja, falls ich "im Motor" die Temperatur messen könnte, könnte ich den Wärmestrom bestimmen und somit rechnerisch auf die anderen Werte kommen. Jedoch glaube ich, dass bei mir "nur" ein Verständnis bzw. Vorgehensproblem besteht?!?! Ziel ist, die Wicklungstemperatur rechnerisch zu bestimmen und evtl. mit der Zeit das Modell noch zu erweitern, was eher kein Thema darstellen sollte, wenn der Weg klar ist... Grüße, Andreas
Der Wärmestrom entspricht doch der Verlustleistung des Motors. Hat man Nennbetrieb, nimmt man einfach die Daten aus dem Typenschild (Leistung, Wirkungsgrad). Hat man weniger Drehmoment, reduziert sich die Wärmeleistung aus der Ankerwicklung quadratisch. Ggf. kann man die Verluste der Feldwicklung (falls vorhanden), der Reibung und durch Ummagnetisierung (Eisenverluste) auch noch berücksichtigen.
Angehängte Dateien:
-

therm1.png
62 KB

Da das recht schnell unübersichtlich wird, habe ich mich nie lange mit analytischen Lösungen beschäftigt und solche Probleme in LTspice lösen lassen. So wie es aussieht, bin ich damit nicht der einzige:
1 | However, if you’re interested in arbitrary time−varying |
2 | power input, or are starting with the grounded−capacitor |
3 | (i.e. physically significant) thermal network, the direct |
4 | mathematical approach is much less convenient. Instead, a |
5 | circuit simulator, such as SPICE, provides a flexible and |
6 | straightforward method. |
Roger Paul Stout, Thermal RC Ladder Networks http://www.onsemi.com/pub_link/Collateral/AND8221-D.PDF Von ihm gibt auch noch andere Docs zu dem Thema: General Thermal Transient RC Networks http://www.onsemi.com/pub_link/Collateral/AND8214-D.PDF Als Anhang eine Lösung im s-Bereich aus dem Handout von http://www.electronics-cooling.com/2014/08/webinar-thermal-rc-modeling-using-spreadsheet/ Das Video dazu ist leider nicht mehr verfügbar.
Angehängte Dateien:
-

cauer_wolf.png
43 KB -

cauer_lts.png
21 KB


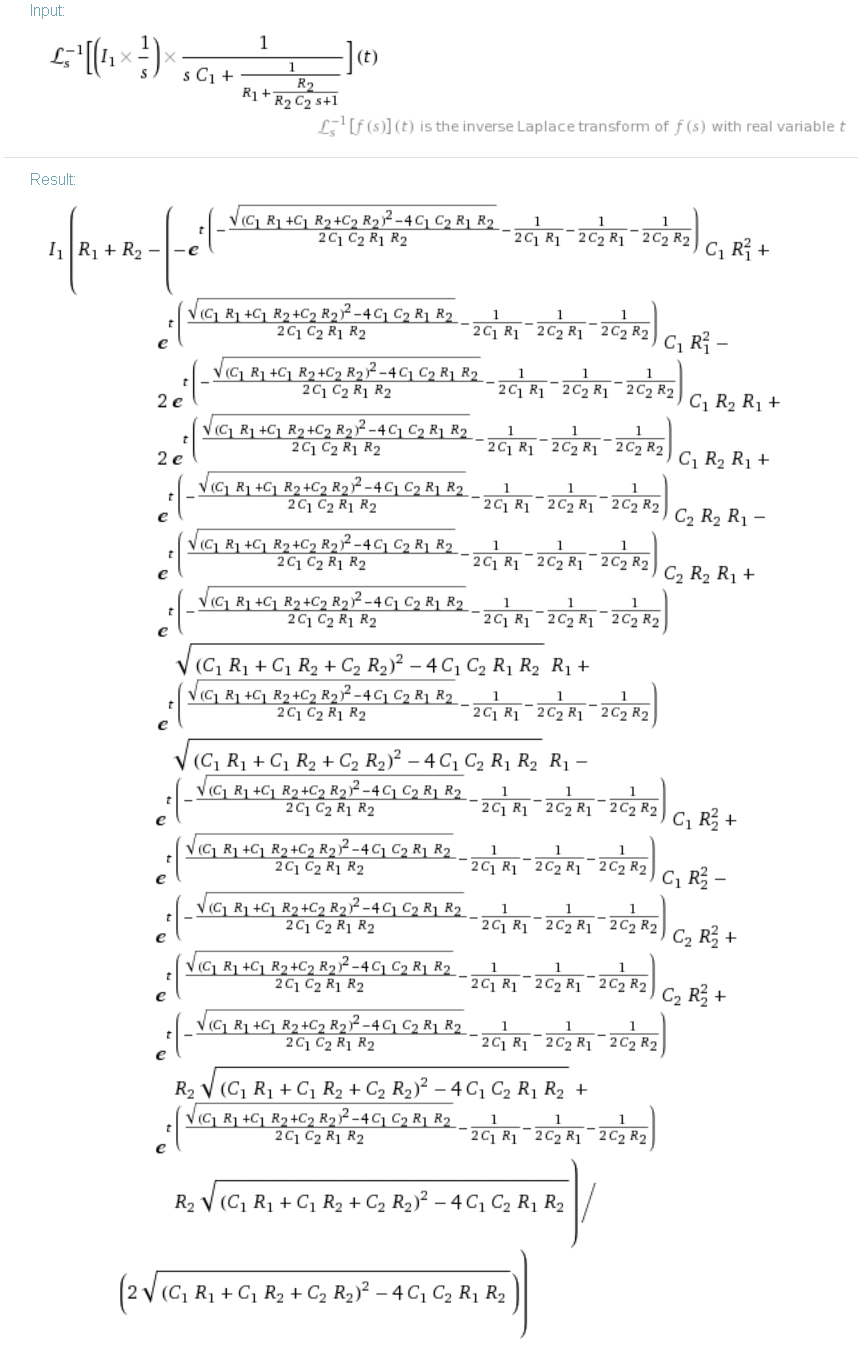
Da ich so eine Lösung im Bildbereich noch nie gemacht habe, hat es mich doch interessiert. Also die Formel
1 | InverseLaplaceTransform[1/(s*C_1+(1/(R_1+(R_2/(R_2*C_2*s+1))))),s,t] |
bei http://www.wolframalpha.com/ eingestellt und das Ergebnis in LTspice verglichen. Wenn nur C2 und R2 oder C2, R1, R2 vorhanden sind funktioiert es - nicht jedoch, wenn alle vier Teile dranhängen. Der Audruck unter der Wurzel ist als Parameter x1 definiert, die Vorzeichen im Exponenten hab ich separat in den Parametern xp bzw. xn berücksichtigt. Zum Zeitpunkt t0 bleibt nur 1/C1 übrig, daher aus dem Nenner entfernt. Der stationäre Wert muß sich zu U=I1*(R1+R2) ergeben. Könnte mir bitte jemand erklären, wo es klemmt?
Hallo, vielen Dank für die Beiträge und die Quellen vorallem! Aus dem Datenblatt kann man entsprechend den Wirkungsgrad und somit die Verlustleistung berechnen. Mich interessiert aber genau die Sache, welche "grammat" dargelegt hat. D.h. vorallem, man sollte NICHT im Zeitbereich arbeiten - was also mein "Faulheitsfehler" ist. Vorallem dann, wenn ich das Modell noch erweitern möchte und somit neue R's und C's dazu kommen... Somit werde ich auf jeden Fall mit LTSpice weiterarbeiten. @grammat: Vielen Dank für deine Mühe und dein Interesse. Leider kann ich bei der Ursache der Differenz deiner beiden Rechnungen nicht helfen. Aber mir erleuchtet es (ebenso) nicht, warum zum t0 nur 1/C1 gelten soll. Höchstens, wenn wirklich der Kondensator einen ISR ideal 0 hat und somit deutlich größer sein soll als der durch R1 gespeisten Zweig -> sollte sich aber mathematisch nicht so "abrunden" lassen... Bin gespannt, wie es weiter geht!
Hans A. Zwick schrieb: > Aber mir erleuchtet es (ebenso) nicht, warum zum t0 nur 1/C1 gelten > soll. Höchstens, wenn wirklich der Kondensator einen ISR ideal 0 hat und > somit deutlich größer sein soll als der durch R1 gespeisten Zweig -> > sollte sich aber mathematisch nicht so "abrunden" lassen... Das hat jetzt nichts mit einem realen Kondendsator zu tun, sondern ergibt sich aus der e-Funktion: e^(t*x)=1 für t=0
1 | -1*c1*r1+1*c1*r1 |
2 | -1*c1*r2+1*c1*r2 |
3 | +1*c2*r2-1*c2*r2 |
4 | +1*x1+1*x1 |
5 | /(2*c1*x1) |
6 | |
7 | 2*x1/(2*c1*x1) -> 1/c1 |
Das wird dann insgesammt zum 1-fx().
Angehängte Dateien:
-

cauer_wolf2.png
69 KB -

cauer_lts2.png
22 KB

Fehler war, dass ich den Einheitssprung - θ(t)-> 1/s - nicht direkt berücksichtigt habe. Bei Problemen erster Ordnung ist ergibt sich das automtisch; es hätte mir aber schon auffallen können, als in der Lösung für R1, C1, C2 ein Einheitsimpult δ(t) auftauchte. Faul wie ich bin, habe ich I1 auch gleich mitgenommen. Damit funktioniert es nun, zeigt aber wie komplex solche Lösungen schon für zwei Stufen werden.
1 | InverseLaplaceTransform[I_1*(1/s))*(1/(s*C_1+(1/(R_1+(R_2/(R_2*C_2*s+1)))))),s,t] |
In der Quelle B1 steht als Funktion: V=fx()) Da ist doch was faul, denn eine öffnende und zwei schließende Klammern! LTspice bringt aber keine Fehlermeldung. Versteh ich nicht. Habe ich das richtig verstanden, daß du die Sprungantwort des Systems dekomponiert hast, also zerlegt in 4 Komponenten?
Abdul K. schrieb: > In der Quelle B1 steht als Funktion: > V=fx()) > > Da ist doch was faul, denn eine öffnende und zwei schließende Klammern! > LTspice bringt aber keine Fehlermeldung. Versteh ich nicht. Hab ich tatsächlich übersehen und die Fehlermeldung durch Klammer in fx() verschwinden lassen ohne weiter darüber nachzudenken - sagte ich schon, dass ich eher faul bin? ;) > Habe ich das richtig verstanden, daß du die Sprungantwort des Systems > dekomponiert hast, also zerlegt in 4 Komponenten? Das war Wolfram A. - ich hab nur I*θ(t) -> I/s eingebaut und dann wieder in den Zeitbereich zurückrechnen lassen. Wenn ich schon dabei bin - der erste Absatz meines vorigen Beitrags sollte eigentlich so aussehen: Fehler war, dass ich den Einheitssprung - θ(t)-> 1/s - nicht direkt berücksichtigt habe. Bei Problemen erster Ordnung ist ergibt sich das automatisch aus der Grenzwertbetrachtung; es hätte mir aber schon auffallen können, als in der Lösung für R1, R2, C2 ein Einheitsimpuls δ(t) auftauchte. Und auch in der Formel war noch eine Klammer zu viel, da ich das nach Korrektur in wolframalpha nicht in meine Textdatei zurückkopierte.
1 | InverseLaplaceTransform[I_1*(1/s)*(1/(s*C_1+(1/(R_1+(R_2/(R_2*C_2*s+1)))))),s,t] |
Aha. Faule Menschen mit wenig aber dichtem Output sind mir sehr sympathisch! Wenn du in die B1 noch tripdv=1m reinschreibst, werden mehr Punkte berechnet. Dann sieht die Fehlerkurve gleich anders aus. "Mark Data Points" aktivieren.
Abdul K. schrieb: > Wenn du in die B1 noch tripdv=1m Danke - wieder was neues gelernt. Kannte ich bisher nur von den A-Devices.
Hallo. Ich interessiere mich für eine ähnliche Fragestellung. Und zwar möchte ich die thermische Balastung eines Synchron-Linearmotors abschätzen. Ggb ist im Datenblatt die thermische Zeitkonstante T_th. Diese habe ich mir so vorgestellt, wie ein RC-Tiefpass. Dann erhalte ich ein Glied wie zu erwarten: Ty/Tx = 1/(1 +s*T_th). Ich frage mich: Was sind Tx und Ty genau? Wenn es Tempeaturen sind ist Tx dann die Anfangstemperatur, sagen wir mla Raumtemperatur, oder ist sie ohne Strom im Motor Null? Ty wäre dann die Motortemperatur. Mir fehlt aber irgendwo noch die Umgebung ans sich.. Kennt jemand gute thermische Modell, mit denen man ausreichend die Tempperatur abschätzen kann oder kann mir was zu meinen Fragen sagen? Thx und VG, Thoma
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.