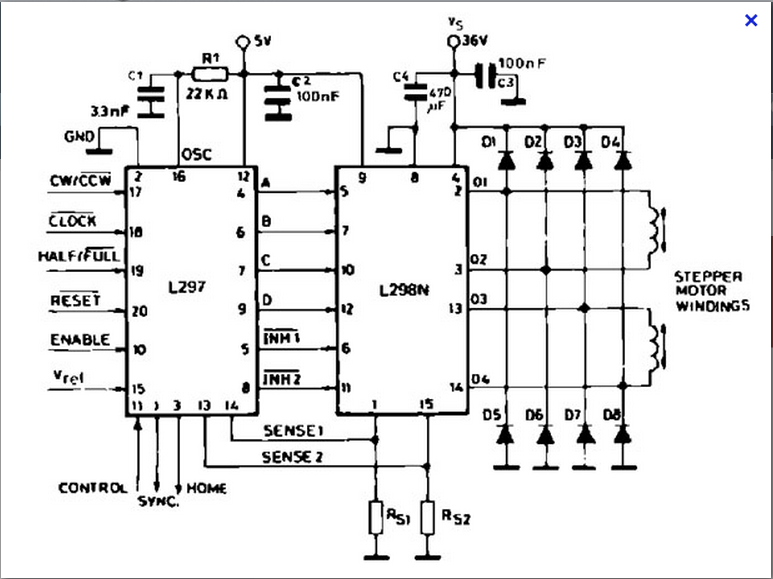
Hallo ich suche ein wie oben beschreiben ein Schrittmotortreiber Chip den mir jemanden empfehlen kann. Ich habe bis jetzt mit einem L298 und einem L297 gebastelt http://www.mikrocontroller.net/attachment/158092/Schaltung.png doch leider bringen die in Kombination mit meinen 12V 0,4A Schrittmotoren nicht die gewünschte Leistung. Habe es auch mal diese fertigen L298 Treiber http://www.ebay.de/itm/Module-L298N-Dual-H-Bridge-DC-Stepper-Motor-Drive-Controller-Board-for-Arduino-/171168406093?hash=item27da6e9a4d:g:Oq8AAOxyTjNSfKXw versucht und konnte zu meinem entsetzten sogar noch mehr Leistung aus meinen Motoren raus holen ( Die frage ist wie lange die das durchhalten ). Bei dem E-bay Teil habe ich noch einen Kondensator abgeklemmt und ihn gegen einen mit über 50V ersetzt was mir dann auch Spannungen bis 50V ermöglichte. ( kein Langzeit Test ) Ich gehe davon aus das die Widerstände 0,5Ohm in meiner L297 Schaltung den Motor bremsen. Deshalb meine Überlegung ist jetzt direkt in die Motorzuleitung Messwiderstände ( 0,005 Ohm ) einzubauen und diese über ein Operationsverstärker an die Sensekontakte des L297 zu bringen. Das ist aber leichter gesagt als getan weil so ein Operationsverstärker gar keine Wechselspannung mag und Dioden das Messergebnis verfälschen. Die Messung an der Motorleitung gehört auf jeden Fall zu den Modernen Techniken aber was wirklich up to date ist konnte ich auch nicht in diesem Forum raus finden. Kennt jemand einen bezahlbaren TreiberChip mit dem ich hohe Spannungen ( min 50V ) fahren kann und eine bessere Lösung haben als die L298/L297 ? Oder kennt jemand eine Möglichkeit wie ich den Messwiderstände auslesen kann und ein Wert von ca. 0,5V heraus bekommen kann.
{kind=link}
Hier findest du eine Übersicht über gängige Treiber: http://www.schrittmotor-blog.de/ubersicht-uber-gangige-integrierte-schrittmotor-treiber/ Dein Problem ist allerdings nicht der -zugegebenerweise ziemlich in die Jahre gekommene Treiber- sondern der Motor dessen Wicklung zu hochohmig ist. Das Modul aus dem ebay-Link kannst Du vergessen, da ist ja nichtmal der L297 für die Stromregelung mit drauf. Mit freundlichen Grüßen Thorsten Ostermann Rechne mal nach, dein Motor hat ca. 30 Ohm. Da sind die 0,5R der Sense-Widerstände das kleinste Problem.
:
Bearbeitet durch User
Dog G. schrieb: > Kombination mit meinen 12V 0,4A Schrittmotoren Deine Motoren halt nur 0.4A aus, diese 0.4A werden an 12V fliessne, wenn der Strokm nicht andereweitig begrenzt wird. Das eBay Teil begrenzt den Strom nicht, an 50V werden also eher 1.7A fliessen und die 83 Watt den Motor beschädigen, der nur 3 Watt aushält. Dein gebastel kann den Strom auf 0.4A regeln, falls VRef auf 0.2V gelegt wurde (was sogar etwas wenig ist, nimm lieber 2.7 Ohm Widerstände und 1V an VRef). Die 50V werden von der Schaltung zwar runtergeregelt (dafür braucht man auch nicht mehr die vollen 0.4A) aber führen zu höherer möglicher Drehzahl des Motors, sind also ein Vorteil (wobei ich bei ca. 40V bleiben würde, damit man etwas Sicherheitsreserve hat). Aber der steinalte L298/L297 macht kein Microscritt. daher kann es sein, daß dein Motor schon beim einfachen Drehen ohne Last stehen bleib, weil er in Resonanzen kommt. Das wird besser wenn eine Last dran kommt, und noch besser wenn ein Schwingungsdämpfer wie Vexta Smart Damper dran kommt, aber richtig gut wird es erst durch Microschritt. Deine 0.4A schaffen viele, ein TB6560 ist übertrieben, ein DRV8825 oder A4088 wie sie billig bei eBay angeboten werden passen besser. Sie erreichen nicht ganz deine 50V, sondern eher 35V/45V. Selbst ein A3967 liefert genug Strom, aber nur 30V. Die Mikroschrittreiber müssen übrigens auf 0.4V*1.414 als Strom eingestellt werden, also 0.56A. Mehr Leistung, als diese Treiber bringen, wäre auf Dauer nichts für deinen Motor. Der ist aber mit den 12V eh unglücklich gewählt. Wenn man einen baugleichen Motor mit nur 2.3V aber 2A hätte, würde der mehr Leistung bringen, vor allem schneller laufen. Für 2A braucht man dann 2.8A Treiber, das könnte dann ein TB6560 sein. Vergiss ULN2803 oder L298 Treiber.
OK also suche ich mir erst einmal ein Niederohmigen Motor ! ( Ich hab´s geahnt ) Ein 5V/0,8A oder lieber 3.4 V/1.7 A ? Ich mach mir ein bisschen Sorgen um die Ströme ! Meine Treiber haben zum teil 50W bis zu 1 Minute gezogen bis der Motor zu heiß wurde. Mit welchen Strömen und Spannungen kann ich den so ein 3,4V Dingen fahren ? @Ostermann Danke für die Liste mit den Treibern ( Ich war schon mal auf der Seite, habe diese Liste aber nicht gefunden ) Ich habe den Motor schon oft an die grenzen gefahren und brauche auch immer nur kurzzeitig die Kraft aber dann muss die Drehzahl gehalten werden oder die Anlage kann auch komplett ausgehen .
:
Bearbeitet durch User
Hallo Dog Ger Es ist grundsätzlich egal was du für einen Schrittmotor nimmst, solange du eine Quelle hast mit genügend hoher spannung. Die meisten modernen Schrittmotortreiber regeln den Strom. Suche dir einen Schrittmotor mit passender Leistung(Mechanisch) und baue die Steuerung danach dementsprechend auf. Für kleine Leistungen habe ich bis jetzt immer das board von Pololu mit dem A4988 benutzt. Dieses sollte für deine Anforderungen reichen. Bei diesem Board muss man nur ein wenig aufpassen mit den eingängen, da diese sehr stak auf störungen reagieren. ich habe alle eingänge mit einem kleinen Tiefpass entstört (aber nicht zu tief, sonst kann man nicht mehr schnell drehen) Ich bin momentan gerade an einem Board am selber entwickeln welches bis 15A pro Phase vertragen sollte. Wenn ich fertig bin kann ich dir gerne eine Platine geben damit du basteln kannst. Lg
@ kokoianer Das mit der Platine hört sich verlockend an wenn ich dich in irgendeiner weise bei deinem Projekt unterstützen kann kannst du mir gerne schreiben. ( 3D Drucker …) Also werde Ich mir jetzt erst einmal ein Schrittmotor suchen der genug Leistung hat. Dazu hätte ich jetzt nochmal paar dumme Fragen. -Ein 5V/0,8A oder lieber 3.4 V/1.7 A ? ( Er sollte ein Spitzenstrom von 3A nicht überschreiten ) -Mit welchen Spannungen kann ich die fahren (nur) die 3fachen Nennspannung oder geht da noch mehr. ( Für mich bis 50V kein Problem ) -Auf welche Nenndaten vom Schrittmotor muss ich achten um ein guten Drehmoment bei ca. 120 Umdrehungen die Minute zu haben. Es gibt die Unterschiedlichsten Angaben die ich schon durch Übersetzungs-Problemen nicht vergleichen kann. ( Wenn ihr mir direkt ein Motor vorschlagen wollt: Bin an einen Nema 17 gebunden und möchte in der günstigen region von +/-18€ bleiben ) brauche 3 Stück.
:
Bearbeitet durch User
Danke für dein Angebot, ich bin aber bestens bedient. Ein Schrittmotor muss Stromgeregelt sein. ob er 5v oder 3.4v hat ist irrelevant. diese Spannung sagt nur dass du im Stillstand diese Spannung anlegen kannst und es fliesst der Nennstrom. Sobald der Motor aber zu drehen beginnt(natürlich gewollt) brauchst du höhere Spannungen um den Nennstrom zu erhalten. Es geht viel mehr als die 3 Fache Spannung. Ich betreibe meine (kleinen) meistens mit 20-25v. Was ist dein gefordertes drehmoment? Da gibt es ja grundlegende Physik. Leistung = Umdrehung*Drehmoment(natürlich in der SI Einheit). Leistung = Spannung*Strom. Überschlagsmässig kannst du jetzt die angegebenen Werte rechnen. Lg
Kann ich vom Holding Torque (Haltemoment) den Drehmoment bei meiner drehzahl ableiten ? Was haltet ihr vom 17HS19-2004S1 ? Und dazu dann den TB6560 ? (http://www.ebay.de/itm/TB6560-3A-Controller-Steuerung-CNC-Schrittmotor-Stepper-Motor-Treiber-Driver-/381397233255?hash=item58cd0bee67:g:M4EAAOSwHmhV8lEl)
:
Bearbeitet durch User
Hallo Vom Holding Torque kann nicht direkt abgeleitet werden. das ist im stillstand, wenn der Motor in bewegung ist sinkt die torque. Das könnte man in der Werbung vergleichen mit dem Satz "Bis zu..." wobei 120rpm relativ langsam ist. Wieviel Torque brauchst du denn? für was? Im Anfahrmoment muss zudem immer eine Haftreibung überwunden werden, weshalb sicherlich genügend reserve eingepant werden sollte. Der Motor ist sicher nicht schlecht, kommt auf die Anforderungen drauf an. mit diesem Treiber habe ich keine Erfahrung. Siehr aber aus als ob er funktionieren würde(laut web). Ich beforzuge jedoch pro Motor eine Steuerung und nicht eine Platine für mehrere Motoren. Lg
Nein, kannst du nicht. 2 Motoren mit gleicher Baugröße und unterschiedlicher Wicklungsauslegung können das gleiche Haltemoment haben, aber sehr unterschiedliche Nennströme und damit eine ganz andere Drehmoment-Kurve. Mehr Strom bei gleicher Größe entspricht in der Regel mehr Drehmoment im oberen Drehzahlbereich. Mit freundlichen Grüßen Thorsten Ostermann
Dann ist der: 17HS16-2004S1 besser für mich ?
Dog G. schrieb: > Kann ich vom Holding Torque (Haltemoment) den Drehmoment bei meiner > drehzahl ableiten ? Nein. Ein Motor mit gleicher holding torque aber niedriger Spannung hat bei höherer Drehzahl normalerweise ein höheres Drehmoment, schafft also eine höhere Drehzahl an derselben Mechanik. Die meisten Motoren halten bis 200V aus. Die Stromregelung besserer Treiber regelt das dann passend herunter. Die Stromaufnahme aus dem Netzteil bleibt gleich (ob du nun 12V/0.4A oder 4V/1.2A Motoren hast). Nur nicht-stromgeregelte Treiber ohne Mikroschritte sollte man nicht nehmen. > Was haltet ihr vom 17HS19-2004S1 ? Wir wissen nicht, welches Drehmoment bei welcher Drehzahl du benötigst (und du weisst es offenbar auch nicht).
> Wir wissen nicht, welches Drehmoment bei welcher Drehzahl du benötigst > (und du weisst es offenbar auch nicht). Drehzahl: Zwischen 2-3 s−1 (Umdrehungen pro Sekunde) sollte sich der maximale Drehmoment befinden. Ich kann auch noch über den Zahnriemenantrieb die Übersetzung etwas verändern ( Faktor 0,5-2 ) Drehmoment: Das beste was ich in einen Nema 17 im Bereich von 18€ kriege
Dog G. schrieb: > Das beste was ich in einen Nema 17 im Bereich von 18€ kriege Also ungefähr 0.65N http://www.ebay.de/itm/DE-Ship-High-Torque-Nema-17-Stepper-Motor-65Ncm-2-1A-DIY-CNC-3D-Printer-Extruder-/231657760339 Allerdings kann man den nicht kaufen weil Leistungsdiagramme fehlen (sie werden schlecht sein). http://www.omc-stepperonline.com/download/pdf/17HS24-1206S.pdf Ähnlich aber deutlich teurer was von Nanotec http://de.nanotec.com/produkte/250-st4118-schrittmotor-nema-17/ Der ST4118D3004 hält das Drehmoment bis ungefähr 300upm, also 5u/s, bei 48V auch bis 7.5 u/s Eine Zahnriemenuntersetzung von 1:2 könnte sinnvoll sein. Genauere Auslegung wenn du einen Motor mit Kurve im Datenblatt anschleppst und weisst, wie viel Volt der Treiber bringt (du sagst ja 50V).
:
Bearbeitet durch User
OK meine Einkaufsliste: Schrittmotor: http://www.ebay.de/itm/331440962687?_trksid=p2055119.m1438.l2649&ssPageName=STRK%3AMEBIDX%3AIT Treiber : ( hoffentlich reicht die Spannung ) http://www.ebay.de/itm/381397233255?_trksid=p2055119.m1438.l2649&ssPageName=STRK%3AMEBIDX%3AIT Und weil ich nicht so lange auf die Treiber warten will hab ich mir noch den hier gegönnt. http://www.ebay.de/itm/262183131012?_trksid=p2057872.m2749.l2649&ssPageName=STRK%3AMEBIDX%3AIT Ich kümmre mich jetzt erst einmal um andere dinge und ab Anfang Februar mach ich dann hier weiter. Danke für die Tip´s ob sie mich in die richtige Richtung gelenkt haben werde ich dann schreiben.
:
Bearbeitet durch User
Die Einheit für Drehmoment ist Nm nicht N... Die 0,65Nm sind für den kleinen Motor sehr optimistisch. Ich könnte 0,48Nm anbieten: http://www.mechapro.de/shop/Schrittmotoren/42mm-Flansch-Nema17/Schrittmotor-Nidec-Servo-KH4248-B95101::46.html Mit freundlichen Grüßen Thorsten Ostermann
Hallo Michael, > Die meisten Motoren halten bis 200V aus. Die Stromregelung besserer > Treiber regelt das dann passend herunter. Die Stromaufnahme aus dem > Netzteil bleibt gleich (ob du nun 12V/0.4A oder 4V/1.2A Motoren hast). Mit solchen allgemeinen Aussagen wäre ich sehr vorsichtig. Ich habe mal bei verschiedenen Motorherstellern angefragt, welche Spannungen die für welche Motorgröße spezifizieren. Oriental Motor spezifiziert z.B. für Nema17 Motoren max. 48V, für noch kleinere Motoren z.T. nur 24V oder 36V. Man kann z.T. auch noch höhere Spannungen verwenden (100V für Nema23/56mm Flansch), aber das ist dann vom Hersteller nicht spezifiziert. Abgesehen davon verlässt man jenseits der 48V auch den Bereich der Schutzkleinspannung. Da muss man sich dann bzgl. Isolation gut überlegen, was man tut. Mit freundlichen Grüßen Thorsten Ostermann
Dog G. schrieb: > OK meine Einkaufsliste: Schrittmotor: Ebay-Artikel Nr. 331440962687 Ich sehe, du scheisst drauf, was du da kaufst, Hauptsache billig Michael B. schrieb: > Allerdings kann man den nicht kaufen weil Leistungsdiagramme fehlen (sie > werden schlecht sein).
> > Ich sehe, du scheisst drauf, was du da kaufst, Hauptsache billig > Tja mit dem Leistungsdiagramme hast du schon recht. Doch da ich keine hohen Drehzahlen brauch 120 U/min und mit der Übersetzung noch etwas raus holen kann bin ich das Risiko eingegangen. Ich mach das nicht für die Firma sondern Privat. Wenn der Motor es nicht bringt habe ich schon eine andere Verwendung für ihn und dann kann ich immer noch das dreifache für ein Nanotec ausgeben.
Wenn meine Treiber und Motoren angekommen sind, brennt mir jetzt schon die Frage auf den Fingern wie ich meine Motoren und Treiber teste. Gibt es ein simple Technik den Drehmoment vom Schrittmotor so zu messen, dass ich ihn mit anderen eigenen Messungen vergleichen kann ? -Ich hab da was mit Gummiband und Federwaage die der Schrittmotor über eine Schnur spannen muss im Kopf . Den Drehmoment wieder in elektrische Energie zu verwandeln und dann messen was man verheizt scheint ohne passenden Poti nicht einfach zu werden des weiteren habe ich kein „Generator „ der mehr oder weniger in dem Leistungsbereich liegt. Den wenn ich ein 2ten Schrittmotor nehme und in mit einem Poti als Bremse nutze muss dieser ja wahrscheinlich stärker sein als der zu Testende Schrittmotor . - Ich hätte da noch ein leistungsstarken BL-Motor aber wie ich den Strom verheize weiß ich nicht und will auch keine Riesen Sache daraus machen. -Ein Kollege meint es wurde früher mit einer Art Balkenwaage gemacht . ( Pendelmaschine ) vielleicht kann ich mit einem Einfachen Gleichstrommotor den Schrittmotor ausreichend bremsen und die Hebelkraft dann messen. Hat schon mal jemand von einen ähnlich Aufbau gehört oder getestet?
Dog G. schrieb: > aber wie ich den Strom verheize weiß ich nicht Bevorzugt mit Glühlampen passender Leistung. Grössere Leistungen mit Widerständen im Wassereimer (Das macht man bevorzugt kurz vorm wöchentlichen Badetag).
Doch auch die Glühlampen oder badeten Widerstände muss ich ja regeln damit ich den Punkt abpassen kann wenn die ersten Schrittverluste auftreten. Wo ich beim Nächten Problem wäre wie erkenne ich die Schrittverluste wären des Betriebes ? (Möglicherweise durch hören aber gibt es eine genauere Methode ?)
:
Bearbeitet durch User
Wenn jemand mehr zeit in so was investieren will der kann sich das durchlesen aber so viel aufwand wollte ich jetzt nicht treiben : http://www.schuelerkonferenz.edu.tum.de/fileadmin/w00brm/www/Facharbeiten_2008/brem_andreas_2008_www.pdf Will da jetzt auch kein neues Thema draus machen. Vielleicht werde ich mir mal eine Wirbelstrombremse zeichnen und ausdrucken aber ob die den Drehmoment aushält und gut Einstellbar ist fraglich. Werde erst mal versuchen ein einfachen DC-Motor (Akkuschrauber) mit einem Labornetzteil gegen den Motor laufen lassen und den DC-Motor mittig auf eine Balkenwaage schrauben die mir dann mit der Bremskraft Gewichte hebt. Müsste damit sogar die genauen Nm errechnen können.
Dog G. schrieb: > leider bringen die in Kombination mit meinen 12V 0,4A Schrittmotoren > nicht die gewünschte Leistung. Frage dich doch zu allererst mal, wie schnell deine Schrittmotoren drehen sollen. Davon hängt nämlich ab, wie hoch deine Versorgungsspannung sein soll. Je höher, desto schneller kannst du deine Motoren drehen lassen. Heutige Schrittmotor-treiber enthalten nämlich zwei Vollbrücken im PWM-Modus. Da wird der gewünschte Strom (aufgeteilt je nach Mikroschrittwinkel) durch den Motor getrieben. Im statischen Fall oder bei nur geringer Geschwindigkeit spielt da der ohmscheWiderstand deiner Motorwicklungen die Hauptrolle. Aber je schneller zu drehen ist, desto schneller müssen die Motorströme geändert werden und dafür braucht es Spannung. Schau bei den üblichen Treibern (von Allegro, ON, TI) nach, was für RDS_on sie haben. Je geringer, desto besser. Die Chips sind zumeist nämlich in recht winzigen QFN gehaust und brauchen deshalb für ihr thermal-pad auf dem Bauch viel mehr als sie selbst groß sind an Kupferfläche auf der Unterseite der LP - da hilft es ungemein, wenn der gekaufte Chip 100 mOhm weniger hat als ein anderer. Eine Ausnahme sind die etwas älteren Chips von ON, die im DIL daherkommen und auf ihrer Oberseite die Fläche haben, die auf den Kühlkörper geschraubt werden soll. W.S.
Eine Ausnahme sind > die etwas älteren Chips von ON, die im DIL daherkommen und auf ihrer > Oberseite die Fläche haben, die auf den Kühlkörper geschraubt werden > soll. Du meinst wie der TB6600 oder TB6560 ? konnte nix von einem RDS_on finden !
Die Idee ein DC-Motor bzw. war ich schon bei einem BL-Motor mit Hall-Sensoren auf eine Balkenwage zu spannen habe ich verworfen. Als ich mit dem Doppelten Kreuzgelenk zur Verbindung fertig war und die Motorhalterung zeichnete stellte ich fest das die Sache doch mehr Zeit kostet als ich investieren will. Also werde ich jetzt ganz einfach über eine kleine Winde an der Decke mit dem Motor Gewichte an einer Schnur hoch heben. Die Gewichte ( Muttern und co. ) sind nacheinander an der Schnur befestigt so das sich das Gewicht langsam erhöht. Danach einfach die gehobene Gewicht wiegen und rechnen: Gewicht in kg x Radius der Spule in Meter x 9,81 = Nm Ich habe diesen Schrittmotor :http://www.pollin.de/shop/downloads/D310455D.PDF getestet: 28,5V, maximaler Treiber Strom 0,5A, halbschritt, 2 Umdrehungen die Sekunde Ich bin auf 6,37 Ncm gekommen. Wahnsinn wie genau ich das doch mit simpelsten Mitteln prüfen konnte.
:
Bearbeitet durch User
Nach ein paar Test´s ist meine erste Euphorie erst mal ein bisschen gebremst. Das obige Ergebnis ist nicht ganz richtig. Nachdem ich den Radius noch mal gemessen habe bin ich auf ein Ergebnis von 8,33Ncm gekommen. Als ich den Motor dann mit weniger Spannung und Strom genau nach Datenblatt betrieben habe brachte der dann sogar 9,64Ncm. Laut Datenblatt sollte aber der Schrittmotor nur auf 6,5Ncm kommen und da ich nicht glaube dass die das Datenblatt schlechter machen muss ich bei mir auf Fehler suche gehen. Testaufbau: Motor klemmt auf dem Tisch und hat ein Zahnrad dessen „ Windendurchmesser“ 17mm beträgt. Über ein dünnes Stahlseil werden über eine Umlenkrolle an der Decke in Reihe angebundene Unterlegscheiben ( 112g Stk. ) hochgehoben. Gewicht von 1kg=8,33Ncm und 1,16kg=9,64Ncm Dazu hätte ich jetzt paar Fragen an die Profis: - Gibt es eine sichere Möglichkeit den ersten Schrittverlust zu erkennen ohne Drehgeber oder das überwachen der Stromspitzen ? (letzteres ist wegen der kleinen Drehzahl zu schwer zu erkennen ) - Warum kann der oben genante Motor bei 24V und 0,5A ca.15% mehr Last heben als bei 28V und 0,5A ? ( beide mit dem gleichen L298 / L297 Treiber im Halb-schritt )
:
Bearbeitet durch User
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.