Hallo zusammen, ich habe derzeit folgendes Problem: Sobald ich mit meinem Motorstrom über ca. 2 A komme, steigt die Kommutierung aus und der Motor wird wieder im Schrittmotorbetrieb angelaufen. Liegt das vielleicht an meinen Elkos die als Zwischenkreiskapazität unterdimensioniert sind? Die können nämlich nur 1 A Rippelstrom ab. Hat das damit überhaupt etwas zu tun? Die Betriebsspannung vom Motor beträgt 14 V Es ist unabhängig ob der Strom durch die Drehzahl oder durch die am Motor hängende Last erreicht wird. Sobald die 2 A überschritten werden, funktioniert der Motorbetrieb nicht mehr richtig. Das Netzteil kann einen Strom von 30 A liefern. Hat jemand vielleicht einen Rat? Die Schaltfrequenz der MOSFETs beträgt 32 kHz. Eine Absenkung der Schaltfrequenz war auch erfolglos. Bin über jeden Tip dankbar!
Angehängte Dateien:
-

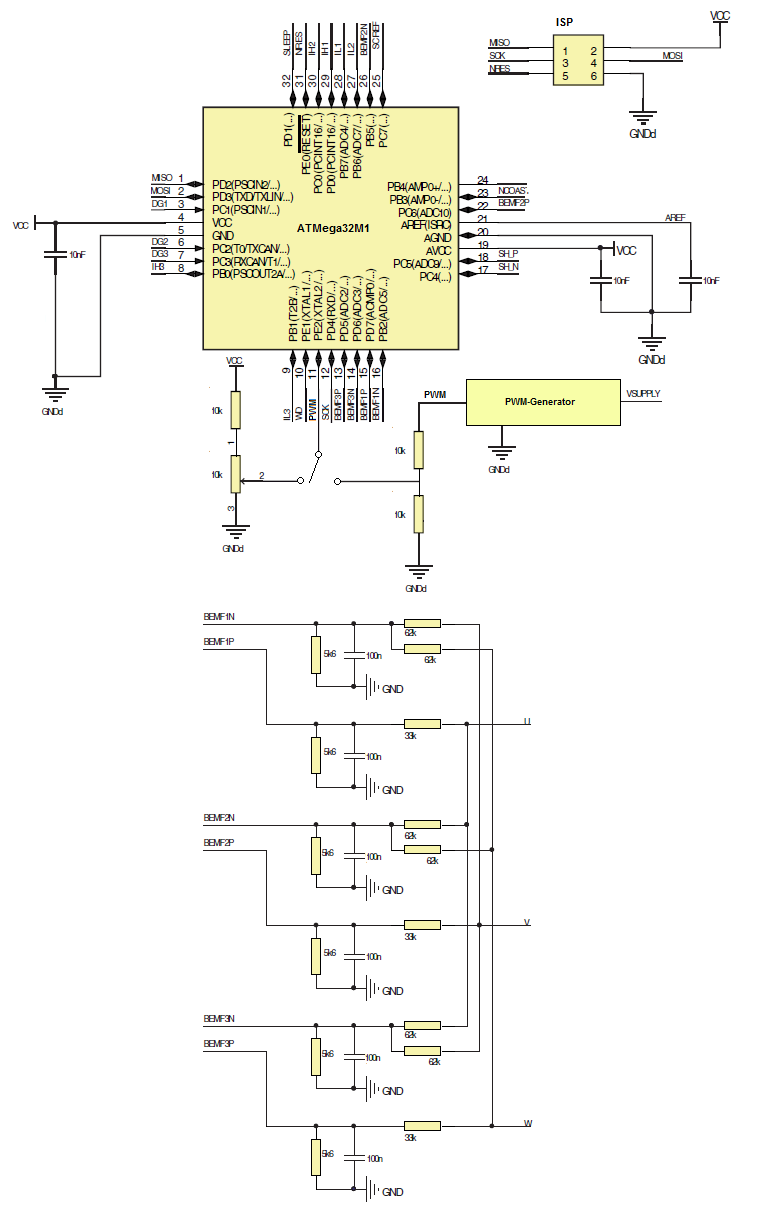
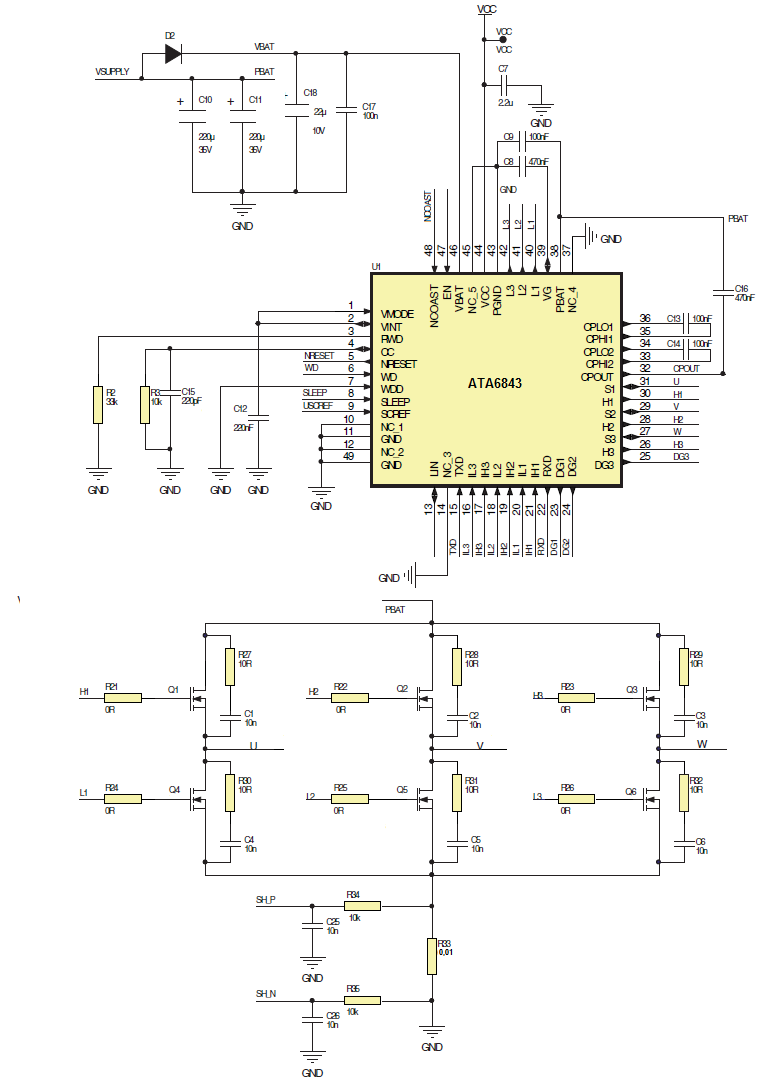
Schaltplan_2.png
86 KB -

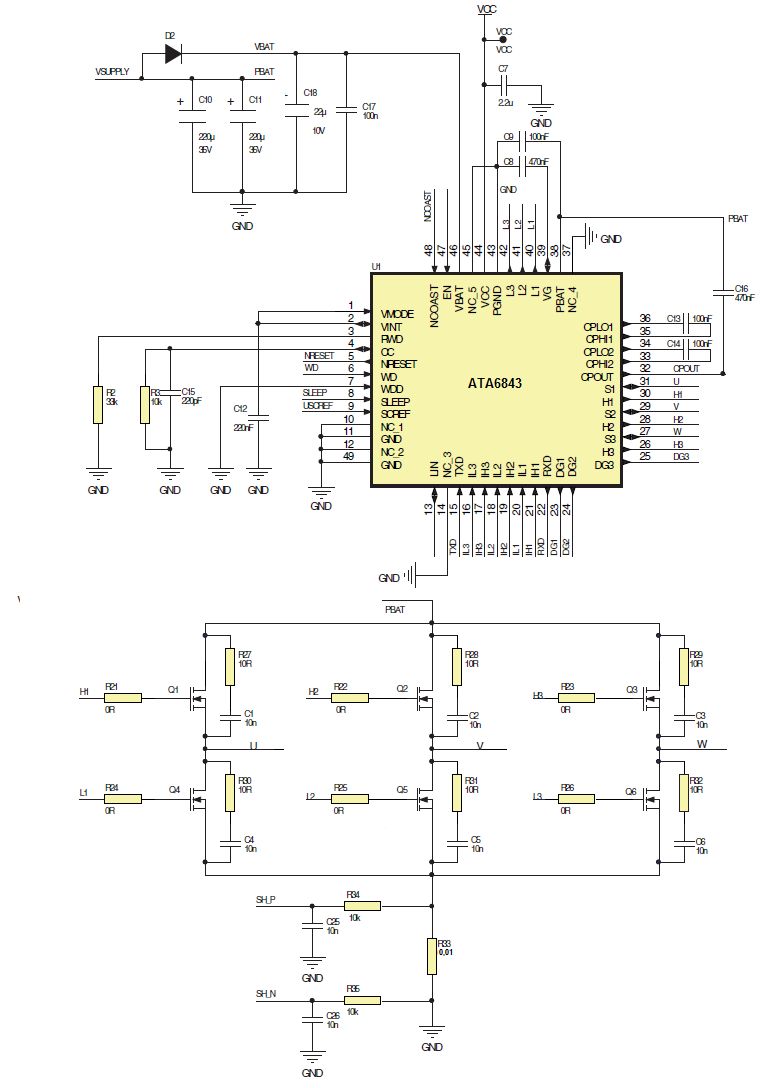
Elektrischer_Schaltplan.bmp
2,4 MB
Kalle schrieb: > Liegt das vielleicht an meinen > Elkos die als Zwischenkreiskapazität unterdimensioniert sind? Die können > nämlich nur 1 A Rippelstrom ab. Wenn da wirklich nur 2* 220µF sind, kannst du da gut und gerne nochmal 1000µF+ rauftun. Denk auch an robuste Verkabelung der gesamten Endstufe, dicke Drähte und so kurz wie möglich. Kalle schrieb: > Sobald die 2 A überschritten werden, > funktioniert der Motorbetrieb nicht mehr richtig. Oszillografiere doch mal die Spannung über dem Shunt. Wenn du da mit steigender Drehzahl Spitzen siehst, kommt es möglicherweise zum 'Shoot-Through' und deine Totzeit ist zu kurz. Das ATA Dings kenn' ich nicht, aber es wird sicher eine Einstellmöglichkeit dafür haben. Kalle schrieb: > Die Schaltfrequenz der MOSFETs beträgt > 32 kHz. Eine Absenkung der Schaltfrequenz war auch erfolglos. Senkt aber die Verluste. Meistens ist es sinnvoll, die PWM gerade ausserhalb des Hörbereichs zu halten, das reicht.
:
Bearbeitet durch User
Angehängte Dateien:

{kind=link}
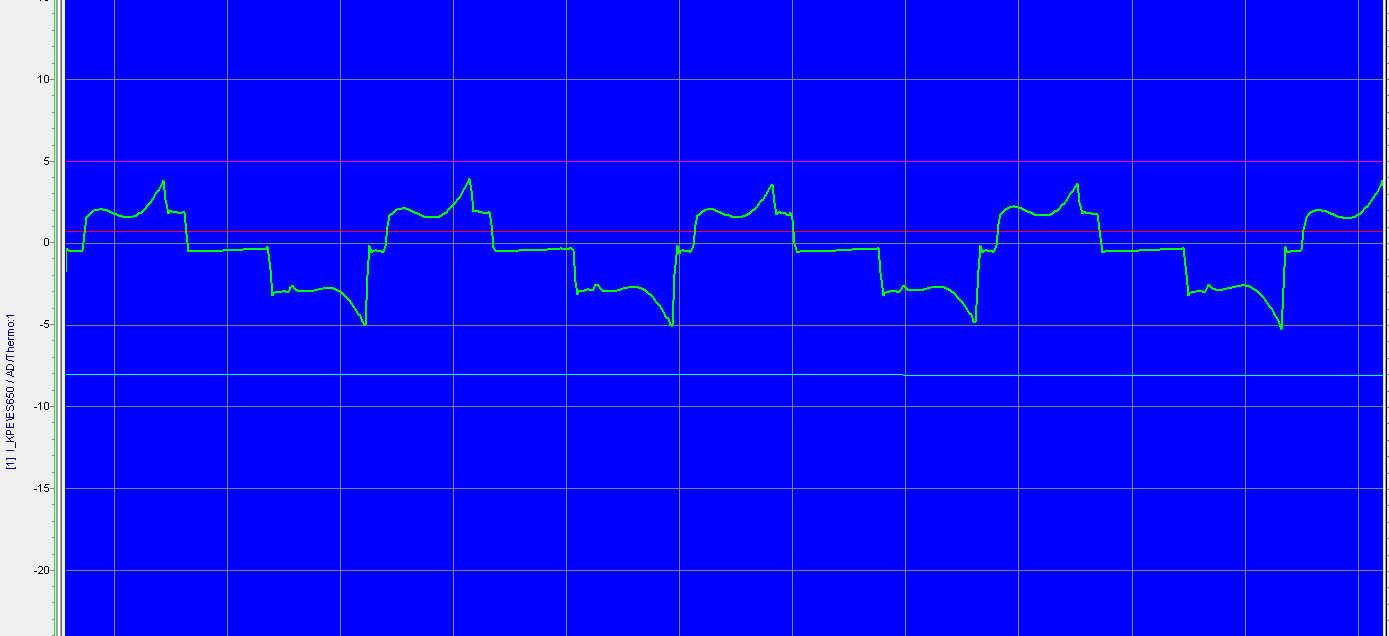
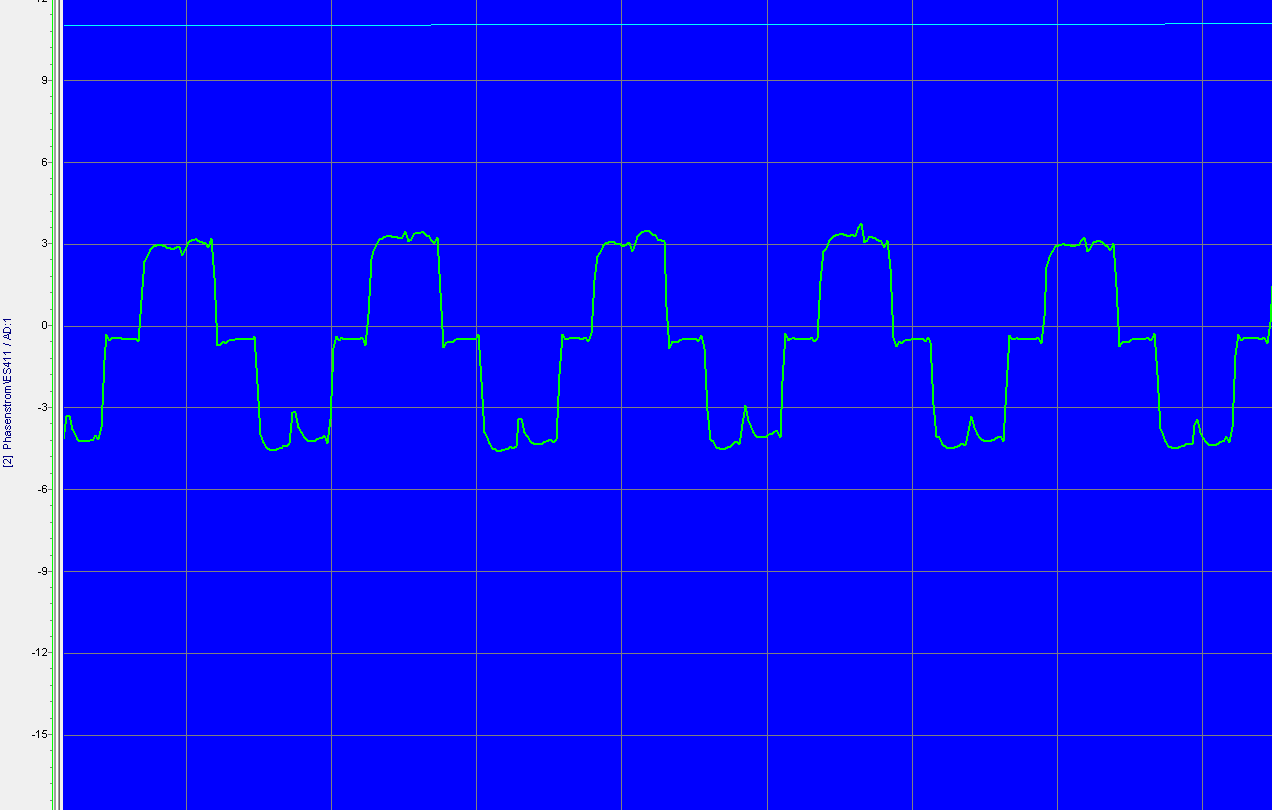
Hallo zusammen, also als erstes zur Cross Conduction Zeit, diese stellt sich durch die RC-Kombination am Port CC vom Gate-treiber (ATA6843) ein, die bei Atmel Datenblatt hinterlegte Formel für die Berechnung der "Totzeit" lautet: Kcc*Rcc*Ccc -> meine alte Konfiguration ergibt eine Totzeit mit der Konstanten Kcc(= 0,405) von 0,891µs Habe den Widerstand heute 33kOhm erhöht um die Totzeit zu verlängern, somit ergibt sich eine neue Totzeit von 2,94µs Die Zwischenkreiskapazität habe ich auf jeweils 1000µF erhöht. Ein erneuter Versuch zeigt leider wieder das es trotzdem nicht funktioniert. Ein Oszilloskop habe ich leider nicht zur Hand aber ich zeichne einen der Phasenströme auf. Mir fällt auf das der Phasenstrom absolut unsymmetrisch verläuft. Könnte das durch einen Vorwiderstand am Gate behoben werden? Man erkennt auch das sobald der Motor aussteigt eine Strom- bzw- Spannungsspitze erkennbar ist. Wird wahrscheinlich daran liegen, dass der High-Side und Low-Side Schalter der halbbrücke durchschalten. Ich habe insgesamt 3 Grafiken angehängt, bei der ersten sieht man den unsymmetrischen Phasenstromverlauf. Die zweite Grafik zeigt den Zeitpunkt an dem der Motor aussteigt (hoher Strom. -bzw. Spannungsimpuls). Die dritte Grafik zeig den symmetrischen Phasenstrom, vom BLDC-Controller der original für die Ansteuerung des Motors verwendet wird. Der Phasenstrom ist jeweils hellgrün in der Grafik dargestellt. Wenn ein Vorwiderstand helfen könnte, wie groß sollte dieser ca. sein? Vielen Dank!
Wenn der Motor wie ein Stepper Motor agiert, dann ist der Motor fähig schneller zu kommutieren als die angelegte Kommutierungsrate. Wenn die Kommutation so früh erfolgt, dass der Motor nicht folgen kann, führt das dazu, dass der Motor zu spät die nächste Phase erreicht, bei gleichzeitiger Stromerhöhung. Das soll abrupt passieren, nicht weit von der idealen Rate. (AN857) Das Problem könnte also vielleicht auch an einem falschen Zeitpunkt der Kommutierung liegen. Im Prinzip misst man die BEMF und die Zeit zwischen zwei zero crossings, was 60° entspricht. Insgesamt sind es ja 6 Phasen mit je 60°. Die Zeit zwischen zero crossings wird durch zwei dividiert, wodurch man den Zeitpunkt für die Kommutierung der nächsten Phase, nach dem letzten zero crossing erhält. Wobei die Kommutierung tatsächlich einige Grad früher erfolgen soll, was man als sogenanntes Timing bezeichnet. Es stimmt also evt. etwas nicht an der BEMF Messung oder Berechnung der Kommutierungsphasen. Vielleicht helfen die entsprechenden application notes (AN857, AN901 etc.) auch weiter.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.