Hallo
An einem Getriebemotor ist ein endlos drehbares Poti angeschlossen.
Über den analogen Eingand wird die Spannung gemessen und immer wenn
diese plötzlich abfällt eine Runde gezählt.
Strom bekommt der Motor immer in kurzen Impulsen, so lange wie der ESP
für 50 analoge Messungen benötigt, dann pausiert er für 100ms.
Ausgeben lasse ich mir die Rundenzeit und die Anzahl der Schritte die
für eine Runde notwendig waren.
Eigentlich ganz einfach, aber die Werte haben komische Ausreißer:
Kolja L. schrieb:> Ausgeben lasse ich mir die Rundenzeit und die Anzahl der Schritte die> für eine Runde notwendig waren.
Dann lass dir doch mal zeit_0 und alle drei Zeiten ausgeben, die du für
deine Rundenzeitberechnung verwendest, also die Ergebnisse aller drei
Abfragen von millis(), die du jede Runde machst. Damit hast du eine gute
Chance, rauszufinden, was da schief läuft. Und denke dran: millis()
liefert einen unsigned long Wert.
Kann man so machen, würde ich aber nicht.
Bilde doch in deiner Mess-Schleife eine Pseudogeschwindigkeit.
Immer beim Übergang des Potis von Max zu Min gibt es dann einen großen
Sprung.
Dann weist Du dass es eine neue Umdrehung war.
Ausgaben in zeitkritischen Stellen ist auch immer ziemlich schlecht.
1
voidloop()
2
{
3
abbort=false;
4
5
digitalWrite(servo,HIGH);
6
oldX=analogRead(A0);//Damit beim ersten Diff annaehernd 0 rauskommt
7
oldTime=millis();//Zeit beim Start merken
8
9
while(!abbort)
10
{
11
newX=analogRead(A0);//Neuen Wert vom ADC holen (Position 1)
Nabend
Mein Rechner spinnt gerade total, ich muss da leider erst dran...
Danke für dein Codebeispiel.
So ganz habe ich es noch nicht verstanden und auch noch nicht getestet.
Aber das mit der Ausgabe in den zeitkritischen Bereichen kann ich
nachvollziehen.
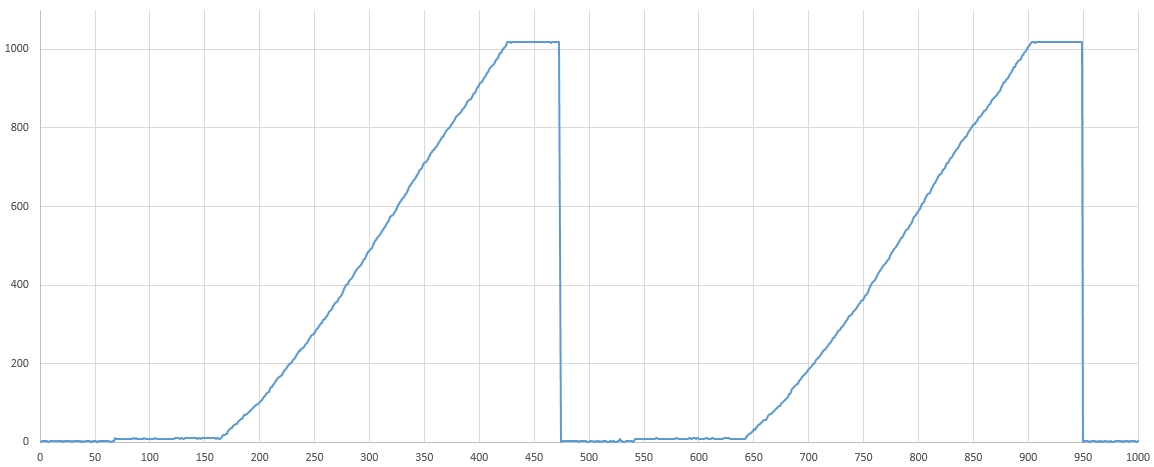
Im Anhang mal ein Bild von zwei Runden des Motors.
Also nur den A0 ausgelesen.
Ziel ist eine relativ genaue Positionierung des Motors.
Im eigentlichen Bereich des Potis (Steigung) ist es ja kein Problem.
Wenn eine Position außerhalb angesteuert werden soll, sollte es wie
folgt laufen:
Der Motor dreht sich 2 volle Umdrehungen und misst die Rundenzeit.
Daraus errechnet der µC sich die Zeit von einer markanten Stelle
(Senkrechte)
bis zur Soll-Position.
Die Steps in dem o.g. Code habe ich eingeführt,
um den Bremsweg herauszunehmen und um dem Weg zu einer Position einfach
Schritte zuordnen zu können.
Aber vielleicht gibt es ja andere / bessere Wege?
Danke und Gruß
Kolja
War das mit der Hand gedreht?
Oder mit einer konstanten Drehzahl?
Wenn das nämlich mit konstanter Drehzahl gedreht war, werden dir die 2
Stellen wo sich nichts ändert die meisten Probleme machen.
Wenn du hingegen einen annähernd sauberen Sägezahn pro Motorumdrehung
raus bekommst, hast du ja einen linearen Zusammenhang zwischen
Motorposition und Spannung am ADC.
> Aber vielleicht gibt es ja andere / bessere Wege?
Einen vernünftigen Sensor nehmen, zum Beispiel optisch wie beim Asuro
http://www.cs.hs-rm.de/~linn/vpdv07/asuro3/asuro-website/images/rad_asuro.JPG
oder mit einem Hall-Sensor.
Es hindert dich ja auch niemand daran, zwei Sensoren zu verwenden. Einen
für die kleinen Teilschritte und einen, um die Ausgangslage zu
markieren. Die meisten Tintenstrahldrucker und Aufzugtüren machen das
auch so - kann also keine schlechte Idee sein.
Dein Poti wird ohnehin nach einigen tausend Umdrehungen kaputt gehen,
aber das hatten Wir dir ja schon vor ein paar Wochen erklärt.
Nicht mit der Hand, sondern durch den Getriebemotor.
Völlig konstant ist die Winkelgeschwindgkeit wohl nicht,
aber das gilt es jetzt herauszufinden.
Und ja, die 3(!) Ebenen machen mir ja die Sorgen.
Im ersten Teil sind es einmal Werte um 5 und dann Werte um 10.
(So in etwa...)
Jeder Wechsel von 5 auf 10 auf Steigung auf 1000 auf 5 kann ja als
Marker genutzt werden.
Mir geht es endgültig nicht darum die Anzahl der Runden zu zählen,
sondern eine Position zwischen 0° und 359° anzufahren.
@Stefan
Auch hatte ich schon mal gesagt, dass leider kein Platz für einen
weiteren Sensor vorhanden ist.
Das Poti gegen eine Drehencoder tauschen würde gehen, aber die gibt es
ja nicht mit <100 Steps.
Kolja L. schrieb:> Das Poti gegen eine Drehencoder tauschen würde gehen, aber die gibt es> ja nicht mit <100 Steps.
Gibt es schon:
http://roboter-teile.shopgate.com/item/454d473330
Wenn du da nur die positive Flanke einer Spur nimmst, hast du 360/4 = 90
Striche pro mech. Umdrehung.
Auf Dauer ist das wie schon gesagt nichts mit dem Poti. Der geht
wahrscheinlich ziemlich schnell hinüber und/oder ändert seine Funktion
abhängig vom Abnutzungsgrad.
Für was willst du denn den Motor positionieren können?
Sprich, was für eine Anwendung steckt dahinter?
Der Verlinkte Motor ist etwas zu schwach.
Wir haben hier Modellbauservos mit ca 10kgcm.
Daher darf ein möglicher Encoder auch nicht so groß sein.
Ein Mehrgangpoti mit knapp 200 Durchmesser passt definitiv nicht...
Die Anwendung ist eine Ventilsteuerung.
Auf das Servohorn kommt eine Nuss (13mm) und dann wird es anstatt dem
Hahn auf das Ventil montiert.
Gruß Kolja
Kolja L. schrieb:> Relativ reicht, da wir die Absolute Position gar nicht wirklich> benötigen.
Also auch nicht Singleturn absolut?
Wie genau musst du denn eine Umdrehung auflösen können?
Für meine Begriffe, ist singelturn absolut doch relativ,
oder wie definierst du das?
Als Auflösung wären 5° schon toll.
Im o.g. Serial Output sind es ca 400 Schritte pro Umdrehung,
so viel muss nicht.
Kannst du deine Idee mit der Pseudogeschwindikeit noch mal erläutern?
Oder Passt das nicht wegen den waagerechten Bereichen?
Danke und Gruß
Kolja L. schrieb:> Für meine Begriffe, ist singelturn absolut doch relativ,> oder wie definierst du das?
Es gibt inkrementelle Geber. Wie der von mir oben verlinkte.
Die auswertende Elektronik wacht auf und weis erst mal nicht wo sie
überhaupt steht. Sie hat keine absolute Winkelposition pro
Motorumdrehung.
Deshalb muss der Motor erst gegen einen Referenzpunkt fahren. Jetzt weis
die auswertende Elektronik, dass sie bei der mechanischen Position 0°
ist und kann über das Zählen der Impulse relativ verfahren. Schaltet man
die Elektronik ab, fängt das Szenario mit der Referenzierung wieder
komplett von vorne an.
Dann gibt es Singelturn Absolut Geber. Wie z.B. ein Resolver. Mit ihm
kann man (wenn er mechanisch einmalig richtig eingestellt wurde) die
Motorposition innerhalb einer Motorumdrehung absolut bestimmt werden.
Die auswertende Elektronik kann die Überläufe der mechanischen Umdrehung
mitzählen und somit auch auf mehrer Umdrehungen genau die Position
bestimmen. Schaltet man allerdings die Elektronik ab und verdreht den
Motor, weis die Elektronik nur die Motorlage. Nicht aber die
Multiturninformation Der Motor kann ja während dem Ausschalten verdreht
werden ohne dass es die Elektronik mitbekommt.
Dann gibt es noch die Multiturn Geber. Sie haben meist noch ein internes
Getriebe und können nach dem Aufwachen sofort die Multiturninformationen
liefern (innerhalb eines Gewissen Wertebereichs).
Das was Du also scheinbar benötigst ist entweder einen Inkrementalgeber
mit einem Referenzpunkt, oder einen Singelturn Absolutwertgeber.
Also mir reicht es, wenn ich immer einen definierten Schritt vorwärts
drehen kann und es möglich ist den letzten Wert auch wieder anzufahren.
Das wäre am einfachsten zu erreichen, wenn der Motor rückwärts laufen
würde,
aber dann brauche ich einen Motortreiber.
Außerdem ist ein Linkslauf wegen der Montage auf dem Ventil ungünstig,
da diese sich dann lösen könnte.
Daher ist mein Schritt zurück, alle Schritte - einer vorwärts.
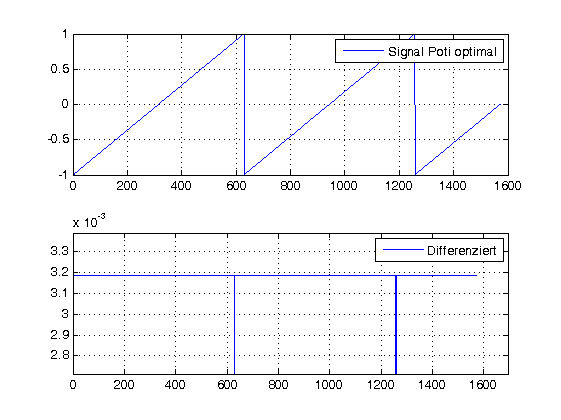
Kolja L. schrieb:> Kannst du deine Idee mit der Pseudogeschwindikeit noch mal erläutern?
Ich dachte Du willst nur ganze Umdrehungen zählen. Dann hätte es bei
absichtlich falsch angewandter Subtraktion immer einen schönen Pikser
bei jeder Umdrehung in der Geschwindigkeit gegeben (siehe Anhang
Optimal.png).
Im gleichen Bild sieht man auch, wie das Signal optimaler Weise aussehen
würde. Ein schöner Sägezahn. So hättest Du dann jeder Spannung einen
Winkel zuordnen können:
0V = 0°
1V = 359°
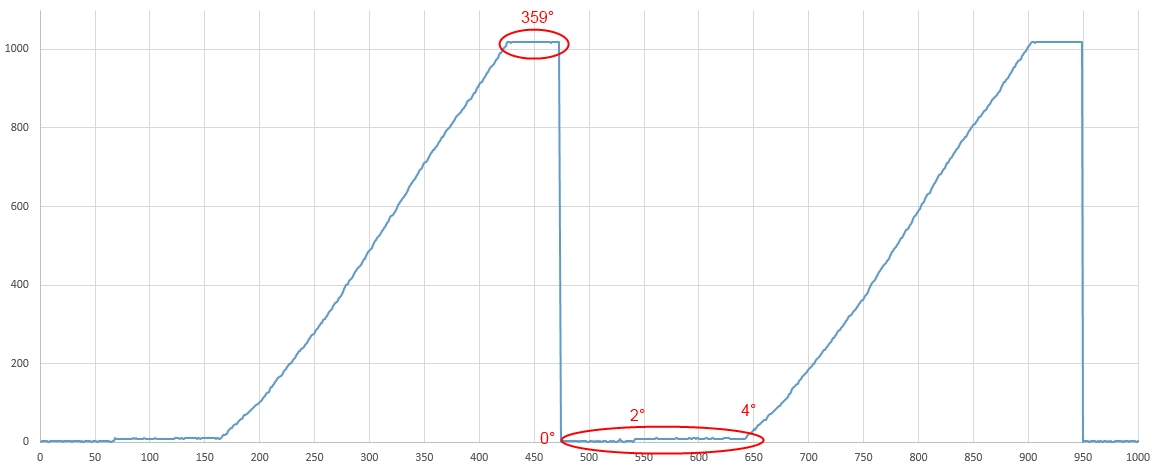
Durch die Stellen wo Du aber keine Steigung hast (siehe rote
Markierungen in Bild ServoPoti.jpg) bekommst Du keine weiteren
Informationen. Sprich, es gibt Bereiche die Dein Motor durchfährt, indem
Du keinen aktuellen Winkel feststellen kannst. Im Prinzip ist an der
Stelle Deine Regelung blind.
Wenn Du nun genau in so einen Bereich positionieren willst, wird dein
Regler immer zwischen diesen Stellen toggeln. Er versucht die Position
zu erreichen. Fährt hinein, die Position ändert sich aber nicht.
Irgendwann kommt wieder eine Position, aber zu groß. Scheiße, der Regler
denkt sich wieder da drehe ich mal um. Dann fährt er wieder in die
andere Richtung, bekommt aber wieder keine aktuelle Position...usw. usw.
Danke für die ausführliche Hilfestellung!
Das Sketch soll erst drei Runden fahren.
Eine Runde bedeutet das überschreiten eines eindeutigen Punktes.
ich habe es mit dem Marker gemacht (wenn größer 1000 wird er gesetzt und
wenn der Wert dann wieder unter 1000 fällt, ist der eindeutige Punkt
gefunden.)
Du machst das über die Pseudogeschwindigkeit (hab ich jetzt verstanden,
gute Idee)
Da die erste Runde keine vollständige ist (meistens jedenfalls) wird
diese vernachlässigt und nur aus den benötigten Schritten von Runde 2
und 3 der Mittelwert gebildet.
Dann wollte ich schauen, wie gut ich damit einzelne Positionen anfahren
kann.
Wenn das reicht (wovon ich nicht ausgehe) ist gut,
wenn nicht, muss ich mir weitere eindeutige Punkte suchen.
Vielleicht finde ich die ja auch über die Pseudogeschwindigkeit,
was ja eigentlich die Steigung ist.
Dann könnte man immer von dem letzten überfahrenden Punkt anfangen die
Steps zu zählen.
Ein Poti, welches ein so schönes Bild macht, wie du in deinem Zweiten
dargestellt hast,
kann es mechanisch leider nicht geben.
Einen kleinen Totbereich gibt es immer...
Kolja L. schrieb:> Vielleicht finde ich die ja auch über die Pseudogeschwindigkeit,> was ja eigentlich die Steigung ist.Kolja L. schrieb:> Steigung ist natürlich nicht richtig, da subtrahiert und nicht dividiert> wird...
Steigung und Geschwindigkeit ist beides richtig.
Die Differenziation bzw. "Steigung" der Position bezogen auf die Zeit
ist ja gerade die Geschwindigkeit.
Ich hatte nur, um nicht dividieren zu müssen, auf die Zeitdifferenz 1
normiert.
{kind=link}