Hallo, meine ersten Hallsensor-Experimente mit dem TLE4905 [1] sind enttäuschend, obwohl viele Threads hier (und woanders) vorher vielversprechend klangen, der Sensor zweckmäßig erschien. Der Sensor soll helfen, die Drehzahl eines rotierenden Arms, durch einen DC-Motor angetrieben, zu messen und diese dann zu regeln. Der Sensor ist stationär montiert, der Arm rotiert über den Sensor hinweg, im Arm ist ein Magnet angebracht und der Luftspalt ist ca. 1 mm zw. Magnet und Sensor. Der Arm ist nur ca. 20 cm lang, um mal eine Größenvorstellung zu geben, der Sensor ist bei Radius ~40 mm montiert. Wenn ich einen Magneten (Neodym-Würfel mit 4 mm Kantenlänge) per Hand bzw. Kunststoffpinzette in N-S-Richtung senkrecht langsam über den Sensor führe, geht dessen Ausgang bei ca. 6 mm Abstand auf Low. Die Hysterese ist dabei auch klar erkennbar. Beschaltet ist der Sensor wie im Datenblatt empfohlen, lediglich die beiden C habe ich auf 10 nF erhöht, weil keine 4,7 nF zur Hand gehabt. Die 5 V kommen aus einem guten Netzteil. Wenn der Arm nun rotiert mit 1 oder 2 Hz oder so, dann kriegt der Sensor nix mehr mit davon. Bei einem größeren Magneten, Scheibe mit 8 mm ø und 5 mm Höhe, ebenfalls nicht. Meine Experimente zeigen mir zZt, daß der Sensor schnarchlangsam ist und für Drehzahlmessungen à la oben beschrieben komplett untauglich scheint. Das widerspricht aber zB Angaben wir "der Sensor kann locker einige Kilohertz erkennen". Nur wie? Ich kann ja keinen Dominostein-großen 500-g-Magneten da an den Arm zurren. Grüße, Jan. [1] http://cdn-reichelt.de/documents/datenblatt/B400/TLE4905L_TLE4935L_TLE4945L_TLE4935-2L%23SIE.pdf
Angehängte Dateien:
-

tle4905.png
26 KB
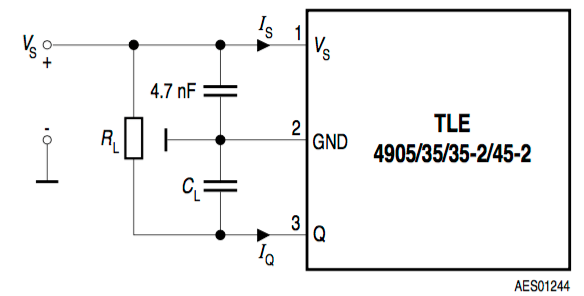
CL und RL bilden zusammen ein RC-Glied welches die Geschwindigkeit beeinflussen, lass einfach mal CL weg und schau dir dann das Signal an.
derElf schrieb: > CL und RL bilden zusammen ein RC-Glied welches die Geschwindigkeit > beeinflussen, lass einfach mal CL weg und schau dir dann das Signal an. Hallo derElf, das bringt genau gar keine Veränderung. Leider. Trotzdem danke für Deinen Tip.
Lt. Datenblatt hat der Sensor eine "Rise/Fall time" VON 1 uSek. Da stimmt was an Deinem Aufbau/ Schaltung nicht und ein größerer / stärkerer Magnet macht den Sensor auch nicht schneller. Lediglich der Luftspalt, der überbrückt werden kann wird größer.
Auf Seite 7 steht als Test Condition für C_L<33pF, also eher was parasitäres, als wirklich ein Bauteil.
@ Jan R. (janra) >Sensor. Der Arm ist nur ca. 20 cm lang, um mal eine Größenvorstellung zu >geben, der Sensor ist bei Radius ~40 mm montiert. >Hysterese ist dabei auch klar erkennbar. Beschaltet ist der Sensor wie >im Datenblatt empfohlen, lediglich die beiden C habe ich auf 10 nF >erhöht, AUA!!! CL ist ein PARASITÄRER Kondensator! Den bringt man NICHT zusätzlich als Bauteil in die Schaltung, der ist schon dort, typisch 33pF (Ausgangskapazität des ICs + Tastkopfeingangskapazität beim Messen). >Meine Experimente zeigen mir zZt, daß der Sensor schnarchlangsam ist und >für Drehzahlmessungen à la oben beschrieben komplett untauglich scheint. Nö. Deine Beschaltung ist falsch. Bei RL=1,2kOhm und Cl=33pF (PIKOFarad, das ist Faktor 3300 kleiner als deine 10nF!!!) mach das Ding 1us Anstiegszeit. Damit kann man locker 10kHz messen.
Jan R. schrieb: > Wenn der Arm nun rotiert mit 1 oder 2 Hz oder so, dann kriegt der Sensor > nix mehr mit davon. Ist das wirklich der Sensor oder ist deine Software so lahm? Schau dir das mal auf dem Oszilloskop an. Falls nicht vorhanden, tut es auch eine LED mit vorgeschalteter Treiberstufe (irgend ein Logikgate). Eine weitere Möglichkeit: Du hast den Sensor hinter einer gut leitenden Metallplatte (Alu oder Kupfer) versteckt. Die Wirbelströme im Metall verhindern dann eine schnelle Änderung des Magnetfeldes.
Hp M. schrieb: > Ist das wirklich der Sensor oder ist deine Software so lahm? > Schau dir das mal auf dem Oszilloskop an. Falls nicht vorhanden, tut es > auch eine LED mit vorgeschalteter Treiberstufe (irgend ein Logikgate). > > Eine weitere Möglichkeit: Du hast den Sensor hinter einer gut leitenden > Metallplatte (Alu oder Kupfer) versteckt. Die Wirbelströme im Metall > verhindern dann eine schnelle Änderung des Magnetfeldes. Hey, beides nicht der Fall: Den Sensor beobachte ich zZt ausschließlich am Oszi, denn die Software ist noch gar nicht geschrieben. Und der Sensor hat kein Metall in seiner Nähe. Der Arm ist aus Kunststoff, die (Projekt-)Basisplatte aus Multiplexholz. Der Sensor ist mit der ganzen Länge seiner Beine (THT) an einer Lochraster angelötet.
@Jan R. (janra) >Kunststoff, die (Projekt-)Basisplatte aus Multiplexholz. Der Sensor ist >mit der ganzen Länge seiner Beine (THT) an einer Lochraster angelötet. Man muss aber auch die Ausrichtung des Magnetfeld zum Sensor beachten, der ist nur in einer Richtung empfindlich, in den anderen theoretisch komplett taub. Praktisch wird man immer ein wenig Streufeld haben, das scheinbar auch in anderen Richtungen funktioniert, aber mit deutlich geringerer Empfindlichkeit.
Angehängte Dateien:
-

tle4905-2.png
86 KB
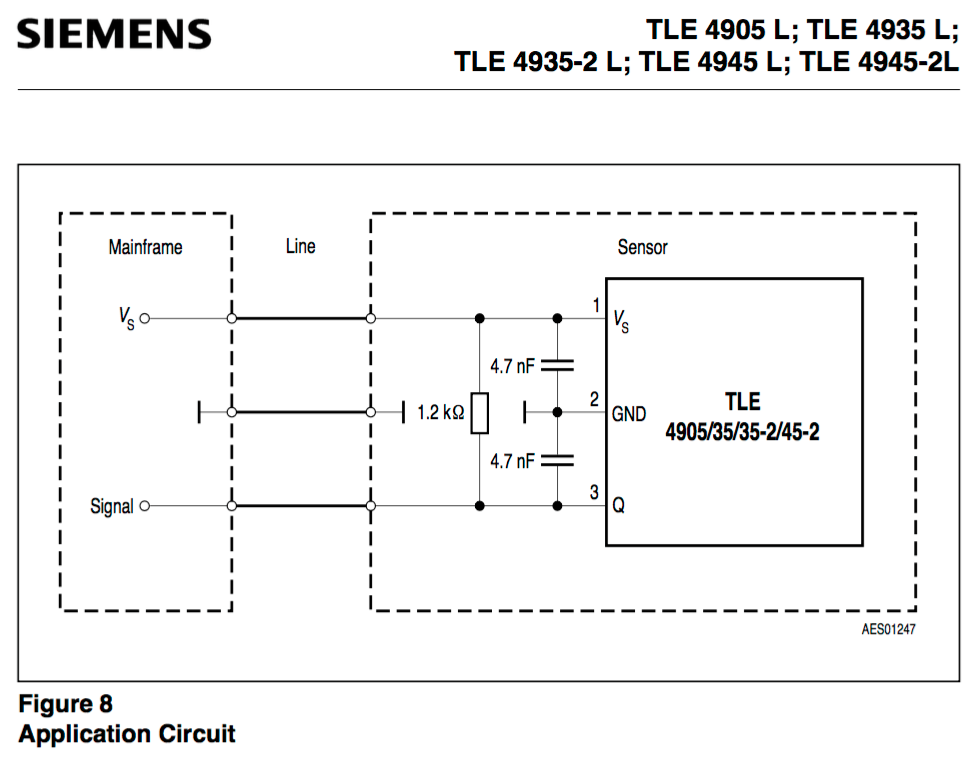
Falk B. schrieb: > AUA!!! > > CL ist ein PARASITÄRER Kondensator! Den bringt man NICHT zusätzlich als > Bauteil in die Schaltung, der ist schon dort, typisch 33pF > (Ausgangskapazität des ICs + Tastkopfeingangskapazität beim Messen). Ah, auf diese Idee bin ich nicht gekommen. Nur weisen die Beschriftungen an dieser Skizze doch sehr deutlich auf externe Beschaltung hin, oder? Wie auch immer: Durch den Kommentar oben habe ich CL entfernt und erhalte gleiches Ergebnis.
@Jan R. (janra) >Ah, auf diese Idee bin ich nicht gekommen. Nur weisen die Beschriftungen >an dieser Skizze doch sehr deutlich auf externe Beschaltung hin, oder? CL = Capacity Load = Lastkapazität ist in Elektronikerkreisen bekannt. >Wie auch immer: Durch den Kommentar oben habe ich CL entfernt und >erhalte gleiches Ergebnis. Dann hast du immer noch einen Fehler. Hast du die Pins auch nicht vertauscht? Wenn du den IC drehst hast du Vs und Q vertauscht. Man beachte Figure 3 im Datenblatt. Die bedruckte Seite des ICs, quasi das "Gesicht" muss in Richtung magnetischer Südpol zeigen. Wenn man den Magneten von oben nähert wird das nix.
Falk B. schrieb: > @Jan R. (janra) > >>Kunststoff, die (Projekt-)Basisplatte aus Multiplexholz. Der Sensor ist >>mit der ganzen Länge seiner Beine (THT) an einer Lochraster angelötet. > > Man muss aber auch die Ausrichtung des Magnetfeld zum Sensor beachten, > der ist nur in einer Richtung empfindlich, in den anderen theoretisch > komplett taub. Praktisch wird man immer ein wenig Streufeld haben, das > scheinbar auch in anderen Richtungen funktioniert, aber mit deutlich > geringerer Empfindlichkeit. Das habe ich beim Experimentieren mit der Kunststoffpinzette mit dem Würfelmagneten auch bemerkt. Es gehen genau 2 Orientierungsrichtungen des Magneten zum Sensor: Nord-Süd und Süd-Nord. Sonst quasi nix.
Hmm, die Sache mit 2x4,7nF ist tatsächlich im Datenblatt. Naja. 1,2k x 4,7nF = 5,6us Zeitkonstante, das ist immer noch sehr flott. Also liegt es entweder an der falschen elektrischen Beschaltung oder falschen Ausrichtung des Magneten zum Sensor.
Gerd schrieb: > Lt. Datenblatt hat der Sensor eine "Rise/Fall time" VON 1 uSek. Ja, aber ich lese das als Anstiegszeit/Abfallzeit, also ein rein elektrischer Wert für die Flankensteilheit. Wie schnell der Sensor in Abhängigkeit von der Stärke des Magnetfeldes reagiert (propagation delay = Verzögerungszeit) habe ich im DB nicht finden können. Da solche Sensoren aber auch in Tastaturen Verwendung finden, möchte ich annehmen, dass sie mit 10..20Hz zurecht kommen.
Angehängte Dateien:
-

tle4905-3.jpg
33 KB
So habe ich den Sensor montiert. Bei der Beschaltung der 3 Beinchen bin ich mir sehr sicher, daß die stimmt. Er funzt ja schließlich auch, nur halt sehr langsam. Aber mit schöner steiler Flanke dank Schmitt-Trigger im Sensor.
Hp M. schrieb: > Wie schnell der Sensor in Abhängigkeit von der Stärke des Magnetfeldes > reagiert (propagation delay = Verzögerungszeit) habe ich im DB nicht > finden können. Im ganzen DB taucht das Wort Frequenz überhaupt nicht auf. Was mich auch vor dem ersten Posting hier bereits mißtrauisch machte, ob der Sensor überhaupt kann, was ich von ihm will. Für einen Endschalter mag der taugen, aber für schneller irgendwie nicht ...
@Hp M. (nachtmix) >Ja, aber ich lese das als Anstiegszeit/Abfallzeit, also ein rein >elektrischer Wert für die Flankensteilheit. Ja. >Wie schnell der Sensor in Abhängigkeit von der Stärke des Magnetfeldes >reagiert (propagation delay = Verzögerungszeit) habe ich im DB nicht >finden können. Ja. >Da solche Sensoren aber auch in Tastaturen Verwendung finden, möchte ich >annehmen, dass sie mit 10..20Hz zurecht kommen. Deutlich mehr. Das Bild ist arg klein, man muss es mit der Sparsamkeit nicht übertreiben. Sieht trotzdem OK aus. >Die 5 V kommen aus einem guten Netzteil. Was für eins? Ein USB-Ladergerät? China-Billigschaltnetzteil?
@Jan R. (janra) >vor dem ersten Posting hier bereits mißtrauisch machte, ob der Sensor >überhaupt kann, was ich von ihm will. Für einen Endschalter mag der >taugen, aber für schneller irgendwie nicht ... Er kann, hab ich selber schon zur Drehzahlmessung bei 20-30 Hz benutzt und da war der Sensor noch nicht mal ansatzweise ausgereizt.
Angehängte Dateien:
-

tle4905-4.jpg
420 KB
Falk B. schrieb: > > Das Bild ist arg klein, man muss es mit der Sparsamkeit nicht > übertreiben. > Sieht trotzdem OK aus. > >>Die 5 V kommen aus einem guten Netzteil. > > Was für eins? Ein USB-Ladergerät? China-Billigschaltnetzteil? Nein, das ist ein Labornetzteil von ELV: PPS 5330. Sonst hätte ich billiges Steckernetzteil geschieben ;)
Gut, und jetzt zeigst du uns noch den Magneten auf deiner Scheibe. Ich tippe mal, daß er falsch gepolt ist. Wenn der Magnet auf deiner Holzscheibe klebt, muss der NORDpol in Richtung Sensor zeigen, denn das "Gesicht" zeigt nach oben. Bei einem Würfel ohne Markierung kann man sich mal schnell täuschen, welcher Pol wo liegt. Bei einem Stabmagneten weniger ;-) Mit dem hier ging es vor 10 Jahren problemlos. http://www.reichelt.de/Reedrelais-Magnete/MAGNET-2-0/3/index.html?&ACTION=3&LA=2&ARTICLE=151642&GROUPID=3291&artnr=MAGNET+2.0 Der Abstand zwischen Magnet und Sensor waren um die 2-3mm.
Ich habe auch nur etwas zur max. Schaltfrequenz des TLE4906L gefunden: Output fall time: max. 1μs Output rise time: max. 1μs (Rl = 1.2kΩ, Cl = 50pF) Delay time: typ. 13μs Switching frequency: 0-15kHz
Jan R. schrieb: > Das habe ich beim Experimentieren mit der Kunststoffpinzette mit dem > Würfelmagneten auch bemerkt. Es gehen genau 2 Orientierungsrichtungen > des Magneten zum Sensor: Nord-Süd und Süd-Nord. Sonst quasi nix. Scheint mir falsch su sein. Wenn das Magnetfeld parallel zur Sensoroberfläche steht, sieht der Sensor nur den ankommenenden oder weglaufenden Pol. Dieser Moment kann recht kurz sein. Das Magnetfeld muss senkrecht zu der Sensorfläche stehen. Wenn du mehrere dieser Magnetwürfelchen hast, dann leg sie mal zu einem Stab zusammen. Bei der stabilsten Anordnung liegt dann immer der Nordpol des einen Magneten auf dem Südpol des nächsten. Also etwa so: NS NS NS NS Am besten markierst du dir die zum Nordpol *) gehörende Fläche mit einem Filzschreiber. *) Im englischen heisst das eindeutiger "north seeking pole" , also der Pol des Magneten, der Norden sucht. Welcher das ist, kannst du einfach herausbekommen, indem du den Magneten so auf eine glatte Tischplatte legst, dass seine Pole nach Osten und Westen zeigen. Wenn du dann ein bischen auf die Tischplatte klopfst, dreht sich der Magnet von selbst in die Nord-Süd-Richtung. Bei manchen NdFeB Magneten ist der Effekt sogar so stark, dass sie überhaupt nicht in O-W-Richtung liegen bleiben.
Angehängte Dateien:
-

tle4905-5.jpg
290 KB
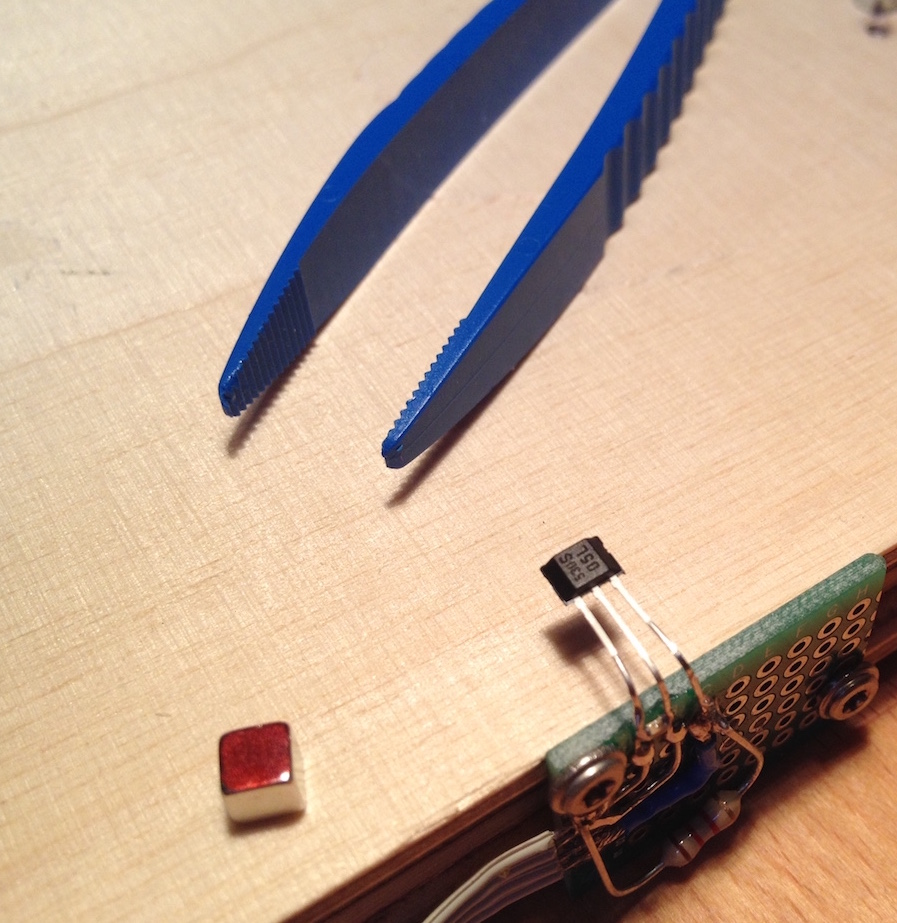
Bevor ich das noch vergesse: vielen Dank schonmal für eure Antworten! Und so schnell. Echt super! Hier ist mein Setup, wie ich den Magneten ohne Dreharm manuell über den Hallsensor bewege. Plastikpinzette zur Vermeidung irgendwelchen Eisens, eine Fläche des Würfels rot markiert. Woher weiß ich, daß das N oder S ist? Indem ich den Würfel vorsichtig von seinen Kumpels abzupfe, wo er ungerne fortmöchte. Rot unten, also zum Sensor gedreht, geht gar nichts, rot oben geht schnarch-langsam. Den Arm kann ich zZt nicht knipsen, da ein Bekannter freundlicherweise so nett ist, den bei sich noch besser auszuwuchten. Beschreibend kann ich aber ergänzen, daß auf dessen Unterseite eine Bohrung existiert der Größe der Diagonale einer Würfelfläche, so daß der da leicht, aber mit guter Haftung/Klemmung drinbleibt. Mit der Eintauchtiefe in der Bohrung kann ich auch zusammen mit Verbiegen der Sensorbeinchen den Luftspalt variieren, ihn minimieren ohne daß es kratzt. Damit beim Pinzettenschwenk keinen Impuls am Oskar verpasse, mache ich den in den Rolling Mode und so, daß einmal von links nach rechts 10 s dauert. Sobald ich etwas schneller über den Sensor fahre, merkt der nix mehr. Mittlerweile, auch mit euren vielen guten Tips, tippe ich auf Exemplarfehler. Leider habe ich auch nur einen hier, kann den also nicht mal beiseite legen und einen anderen probieren.
>Damit beim Pinzettenschwenk keinen Impuls am Oskar verpasse, mache ich >den in den Rolling Mode und so, daß einmal von links nach rechts 10 s >dauert. Sobald ich etwas schneller über den Sensor fahre, merkt der nix >mehr. Vielleicht merkst DU es nur nicht. Wenn die Verweilzeit über dem Sensor kurz ist, ist auch der Puls sehr kurz! Wenn dein Oszi dann vielleicht noch je nach Einstellung den Mittelwert bildet oder eine sehr niedrige Abtastrate verwendet, sieht man nix! Schalte mal die Datenerfassung auf Peak Detect! Stell das mal auf 100ms/DIV. > Mittlerweile, auch mit euren vielen guten Tips, tippe ich auf >Exemplarfehler. Unwahrscheinlich.
Der Widerstand ist doch nur ein Pullup hast du vielleicht einen zu kleinen Widerstandswert genommen so das sich der Transistor etwas schwer tut das ganze auf Low zu ziehen? Zw. den Versorgungspins habe ich bisher immer einen 100nF Kerko genommen. Am Ausgang keinen verwenden der belastet den Transistor nur zusätzlich. Ich hatte einen kleinen Rundmagnet 2mm in eine Aluscheibe eingearbeitet die von einem Motor angetrieben wurde und das funzte wunderbar.
So, ein neuer Sensor ist da und der tut nun auch wie erwartet. Die 12 Hz in dem Aufbau macht er locker, spuckt ganz saubere Rechtecke dank des eingebauten Schmitt-Triggers auf den Schirm des Oszis und verschluckt auch keins davon. Könnte der Motor schneller drehen, dann wären sicher auch höhere Raten als 12 Hz drin. Der Motor ist aus einem Floppy-LW und nur so vom ø eines 1-€-Stücks, also eher schwach. Für die Anwendung mit dem Dreharm aber super. Und ist mit 5 V komplett zufrieden. Der Magnet ist nach wie vor der 4x4x4-Würfel. Der Pullup gem. Datenblatt ist noch drin in meiner Beschaltung, auch wenn ich am AVR den int. Pullup mit angemacht habe. Schadet nichts. Euch allen nochmals besten Dank für Tips und Einschätzungen!
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.