Hallo Leute, ich bin derzeit auf der Suche nach einem Motortreiber für meinem Motor. (Datenblatt: http://de.nanotec.com/fileadmin/files/Datenblaetter/Linearaktuatoren/L41mV/L4118M1804-T6x2-A50.pdf) Hierbei handelt es sich um ein bipoloren Schrittmotor. Der Strombedarf je Phase liegt bei 1.8A und er wird bei 24V betrieben. Leider habe ich sehr wenig Ahnung, was für Motortreiber es gibt und welche Anforderungen er erfüllen muss. Ich habe einen l298 ausprobiert. Der ist leider nach wenigen Sekunden den Hitzetot gestorben. Jetzt suche ich ein Treiber oder Controler-Chip(am besten schon auf einem Board drauf), der entweder mit solchen Strömen umgehen kann oder die Stromstärke regulieren kann. Mit freundlichen Grüßen Ha4ti
H4ti schrieb: > Ich habe einen l298 ausprobiert. Der ist leider nach wenigen Sekunden > den Hitzetot gestorben. Mal unabhängig davon, dass das ein Opa ist: Der L298 schafft 24V, 1.8A locker. Wahrscheinlich hast du den Chip falsch angesteuert. Schaltplan wäre hier spannend und Signaltimings dazu.
Im Grunde ein schöner Motor: 2,8 A mit 1,1 Ohm. A4982, A4988, ..... Ein Beispiel: Beitrag "Schrittmotoransteuerung mit A4982 und ATmega328"
Wenn man bei ebay nach Schrittmotor und Treiber sucht, wird man zugeschüttet. MfG Klaus
m.n. schrieb: > Im Grunde ein schöner Motor: 2,8 A mit 1,1 Ohm. 1.8A. > Ich habe einen l298 ausprobiert. Der ist leider nach wenigen Sekunden > den Hitzetot gestorben. Bei 24V und nahezu 1ohm, da fliegen die Funken. Du brauchst eine Stromregelung oder du nimmst einen Motor mit 24V Spezifikation. Diese drehen sich aber langsam... Sonst, es steht schon alles im Netz geschrieben!
H4ti schrieb: > Hierbei handelt es sich um ein bipoloren Schrittmotor. Der Strombedarf > je Phase liegt bei 1.8A und er wird bei 24V betrieben. 24V ist schon mal nicht verkehrt. Niemand verlangt aber, dass der motor tatsächlich mit 1.8A bestromt werden MUSS. Entscheidend ist das Drehmoment welches Du für Deine konkrete Anwendung benötigst, da reichen oftmals auch 1 - 1,2A. Aufgrund des 3D-Drucker Hypes bzw. der Reprap-Bewegung haben die Pololu/Stepstick-Treiber eine große Bekannheit und Verbreitung erfahren. Technisch auf Kante bzw. je nach Brille sogar grundfalsch konstruiert sind sie jedenfalls unübertroffen preisgünstig für Experimente. Technisch am weitesten entwickelt sind IMHO die Treiber-ICs von Trinamic, als günstigste Variante gibt es derzeit die Silent Stepstick Treiber von Watterott.
Angehängte Dateien:
-

Schaltung_L298.png
12 KB
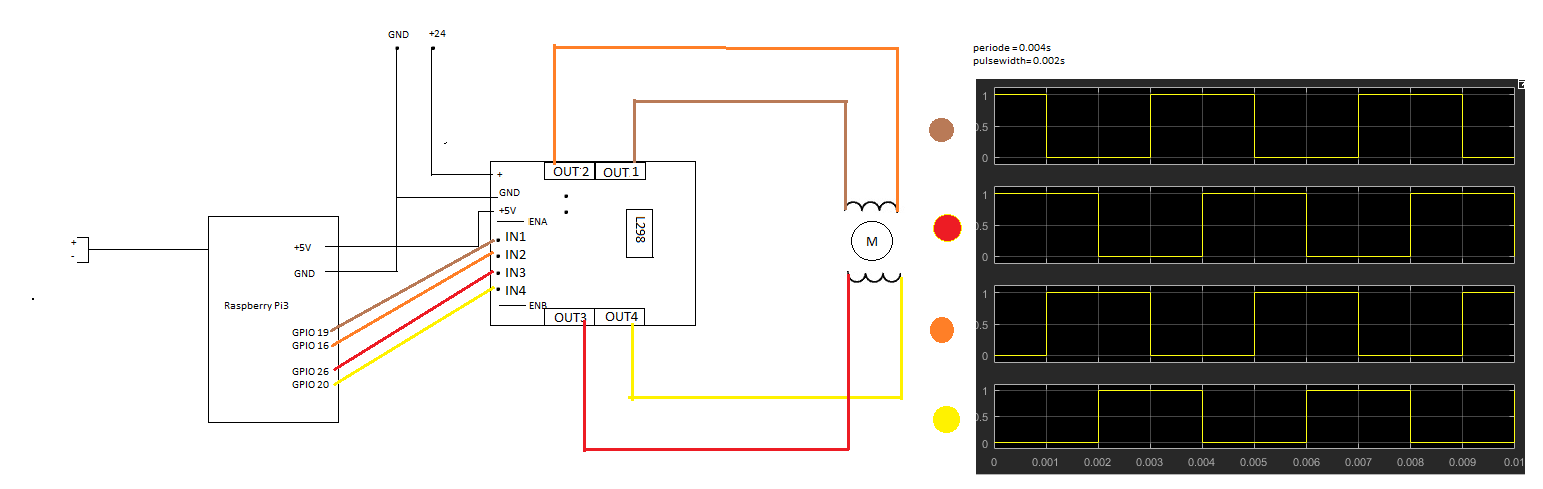
Ok, ich habe mich mal bemüht ein hübsches Schaltbild zu malen. Das verwendete Signal ist da auch grafisch dargestellt. Es wird in dieser Form vom Simulink erzeugt und an den RPi übertragen. Die Periodendauer beträgt 0.004s und die Pulseweite 0.002s. Anfangs hatte ich ein Netzteil angeschlossen, das nur 2.7A maximal liefern konnte, das hat sich aber immer ausgeschaltet im Betrieb. Deshalb bin ich dann auf ein stärkes Netzteil umgestiegen Was ist denn nur verkehrt, wenn das eigl laufen müsste :( ?
H4ti schrieb: > Was ist denn nur verkehrt, wenn das eigl laufen müsste :( ? Du brauchst eine Stromregelung! I=U/R = 24V/1.1ohm = ca. 24A. Beschreibe mal dein Projekt, dann kann man dir besser helfen einen passenden Treiber zu finden. mfg
H4ti schrieb: > Ok, ich habe mich mal bemüht ein hübsches Schaltbild zu malen. Das > verwendete Signal ist da auch grafisch dargestellt. Es wird in dieser > Form vom Simulink erzeugt und an den RPi übertragen. > > Die Periodendauer beträgt 0.004s und die Pulseweite 0.002s. > > Anfangs hatte ich ein Netzteil angeschlossen, das nur 2.7A maximal > liefern konnte, das hat sich aber immer ausgeschaltet im Betrieb. > Deshalb bin ich dann auf ein stärkes Netzteil umgestiegen > > Was ist denn nur verkehrt, wenn das eigl laufen müsste :( ? Wie wäre es zum Beispiel mal mit Eagle zu arbeiten? Ich kann kaum glauben, dass du die Enable-Pins nicht benutzt. Warum hast du dich dafür entschieden den L298 durch den Pi direkt zu treiben und hast nicht gleich die L297/L298 Kombi benutzt und diese durch den Pi angesteuert? aSma>> schrieb: > Beschreibe mal dein Projekt, dann kann man dir besser helfen einen > passenden Treiber zu finden. Wenn schon der L298 falsch angesteuert wird, wird ein anderer Treiber kaum helfen.
aSma>> schrieb: > Beschreibe mal dein Projekt, dann kann man dir besser helfen einen > passenden Treiber zu finden. Der Raspberry soll diesen Schrittmotor mit Linearführung ansteuern. Der Motor ist bereits vorhanden und soll dazu genutzt werden, eine definierte Zugkraft auf eine Feder auszuüben. Das ganze ist nicht zeitkritisch, darf also durchaus etwas langsamer verfahren. Wirklich schnell ist der Motor ohnehin nicht. aSma>> schrieb: > Du brauchst eine Stromregelung! I=U/R = 24V/1.1ohm = ca. 24A. Reicht es zur Strombegrenzung einfach einen zusätzlichen Widerstand zwischen den Treiber und der Motor einzubauen. Bzw. 2 Widerstände, ein für jede Spule. U/I=R --> 24V/1.8A= 13.333 Ohm. Minus dem Spulenwiderstand, wären das ungefähr 12 Ohm
H4ti schrieb: > Hierbei handelt es sich um ein bipoloren Schrittmotor. > Der Strombedarf je Phase liegt bei 1.8A > und er wird bei 24V betrieben. ??? Du meinst, du hast ein 24V Netzteil. > Ich habe einen l298 ausprobiert. > Der ist leider nach wenigen Sekunden den Hitzetot gestorben. Nun, bei 24V wohl. Macht an den 1.1 Ohm deiner Motorwicklung 21.8A. Das hält der L298 nicht mal mit Kühlkörper aus. Dein Motor hat eine effektive Spannung von 2V und eine Spitzenspannung von 2.828V wie man leicht im Datenblatt nahclesen kann. Der Treiber muss den Strom begrenzen. Die 24V helfen dabei eine schnelle Stromanstiegsgeschwindigkeit zu erreichen damit der Motor auch schnell drehen kann. Wenn du nicht schnell drehen musst: Reicht der L298 an 5V (bei maximal 5.6A Strombedarf). Ansonsten: TB6560 passt für 24V (belastet mit maximal 1.2A wegen step down Chopper) und den Spitzenstrom von 2.8A (am Motor) der mit shunt-Widerständen von 0.18OHm (niederinduktiv) eingestellt wird. Und der kann dann immerhin auch Mikroschritte, was für gleichmässigeren Motorlauf ohne Stellstand wegen Resonenzen führt. Ein 1000uF Elko sollte an die 24V.
H4ti schrieb: > Ok, ich habe mich mal bemüht ein hübsches Schaltbild zu malen.... > > Was ist denn nur verkehrt, wenn das eigl laufen müsste :( ? Dein Schaltbild ist einfach nur gequirlter Müll! Entschuldige bitte diese drastische Ausdrucksweise, aber mehr fällt mir momentan dazu nicht ein. Jedenfalls bezweifel ich aufgrund Deiner Äußerungen, dass im Raspi-Programm eine gescheite Schrittmotorsteuerung implementiert ist. Der L298 ist iirc nur eine H-Brücke, um Schrittmotoren damit zu bewegen bekommt er in der Regel noch einen L297 spendiert. Die beiden im Kombination sind Technik von vorgestern, ich hatte oben bereits aktuelle Alternativen erwähnt, die wesentlich einfacher zu handeln sind, da reichen zwei Signale, step und dir. Auch wenn Du auf dem L298 beharrst solltest Du Dich zuerst mal mit der prinzipiellen Funktionsweise von Schrittmotoren etwas vertrauter machen, z.B. wikipedia. Dann hilft auch des Lesen von Datenblättern oftmals weiter, der L297 ist iirc beim L298 ganz fett erwähnt.
M. K. schrieb: > Wenn schon der L298 falsch angesteuert wird, wird ein anderer Treiber > kaum helfen. Seine Schaltung kann durchaus funktionieren bei einen 24V spezifizierten Motor. Man müsste wohl nur noch die EN Pins ansteuern. Habe jetzt keine Lust mir das Datenblatt anzugucken. Der Stepper wird hier wohl in Vollschritt angesteuert. Man müsste halt nur noch die beschleunigten Massen kennen, um zu wissen ob eine Beschleunigungsrampe nötig sei. Oder man verfährt langsamer. mfg
MaWin schrieb: > Nun, bei 24V wohl. > > Macht an den 1.1 Ohm deiner Motorwicklung 21.8A. > > Das hält der L298 nicht mal mit Kühlkörper aus. Schnell gerechnet und schon verkehrt :-( Offensichtlich das Datenblatt vom L298 nicht verstanden. H4ti schrieb: > Reicht es zur Strombegrenzung einfach einen zusätzlichen Widerstand > zwischen den Treiber und der Motor einzubauen. Bzw. 2 Widerstände, ein > für jede Spule. > U/I=R --> 24V/1.8A= 13.333 Ohm. Minus dem Spulenwiderstand, wären das > ungefähr 12 Ohm Unabhängig von der Wärmeentwicklung würde das gehen - allein, damit Du erst einmal ein kleines Erfolgserlebnis hast. Für eine Drehung ohne große Last reichen aber auch 47 Ohm oder auch zwei Glühbirnen 24 V / 5 W aus dem KFZ-Bereich zum Beispiel.
m.n. schrieb: > Schnell gerechnet und schon verkehrt :-( > Offensichtlich das Datenblatt vom L298 nicht verstanden. Auch wenn ich damit zugebe, das Datenblatt auch nicht verstanden zu haben, wieso ist die Rechnung verkehrt?
Kauf dir was fertiges. 5 Treiberplatinen für einen knappen Zehner, sind billiger, als die Chips einzeln zu holen: http://www.ebay.de/itm/5X-A4988-Stepper-Motor-Schrittmotor-Treiber-Driver-3D-Drucker-RepRap-DE-TE208-/400942367320?hash=item5d5a070258:g:v4QAAOSwgQ9VhvR3 MfG Klaus
bianchifan schrieb: > Niemand verlangt aber, dass der motor tatsächlich mit 1.8A bestromt > werden MUSS. Bei einem Schrittmotor empfiehlt sich das aber oft, zumindest wenn man den Motor einsetzt, um nach außen ein Drehmoment abzugeben. Sonst kann man gleich einen kleineren Motor einsetzen.
H4ti schrieb: > m.n. schrieb: >> Schnell gerechnet und schon verkehrt :-( >> Offensichtlich das Datenblatt vom L298 nicht verstanden. > > Auch wenn ich damit zugebe, das Datenblatt auch nicht verstanden zu > haben, wieso ist die Rechnung verkehrt? Ist halt wieder so ein unnützer Einspruch. Jedenfalls, nicht ziellführend. Es wird wohl darauf hingewiesen, dass diese H-Brücke aus Transistoren besteht. Die daraus abfallende Spannung senkt den Strom zusätzlich. Man man m.n.
H4ti schrieb: > .... Der Motor ist bereits vorhanden und soll dazu genutzt werden, eine > definierte Zugkraft auf eine Feder auszuüben. Bist du sicher, dass die Wicklung intern nicht genauso heiß wie der L298 geworden ist? Manchem Kupferlackdraht tut das nicht gut - zumindest der Isolierwirkung des Lackes nicht.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.