Hallo zusammen,
wir sind zurzeit dabei innerhalb eines Projekts einen AD-Wandler mit
einem Arduino über die SPI- Schnittstelle in Betrieb zu nehmen.
Allerdings häufen sich dabei leider die Probleme.
Es handelt sich um einen 18-Bit AD-Wandler ADS8698 mit 8 Kanälen
(http://www.datasheets360.com/pdf/-2640322731015858730?query=ADS8698&pqid=70380223).
Die Verkabelung erfolgt gemäß der SPI-Kommunikation über die Leitungen
SDI, SDO, CS und SCLK. Vorschaltungen für den AD-Wandler haben wir
größtenteils aus dem Datenblatt übernommen, um bessere Ergebnisse zu
erzielen (Spannungsversorgung, Vorschaltung bei interner Referenz etc.).
Weiterhin haben wir den Anschluss RST/PD des AD-Wandlers dauerhaft auf
HIGH und DAISY auf LOW gesetzt.
Bisher versuchen wir über das Setzen der Programmregister (Kapitel 8.5.2
im Datenblatt) einen Befehl an den AD-Wandler zu schicken und uns
letzten Endes die Antwort über die SDO-Leitung herausgeben zu lassen.
Unser Befehl (Programm Register) setzt sich dabei aus 16 Bits zusammen,
wobei die ersten 7 Bits die Register Adresse angeben, das nächste Bit
gibt an ob es sich um einen Lese- oder Schreibbefehl handelt und die
letzten 8 Bits beinhalten den Befehl. Unmittelbar danach müssten über
die SDO-Leitung die Daten, welche in das Register geschrieben worden
sind, ausgegeben werden.
Wir senden dementsprechend in unserem Sketch zunächst den Befehl
SPI.transfer(0x05);
um anzugeben, dass wir einen Schreibbefehl senden wollen, mit dem wir
festlegen welche der 8 Kanäle in den Power-Down versetzt werden und
welche nicht.
Anschließend senden wir weitere 8 Bits mit unserem Datensatz:
SPI.transfer(0xAA);
Demzufolge sollten uns als nächstes über die Datenleitung SDO
abwechselnd 0 und 1 gesendet werden (AA).
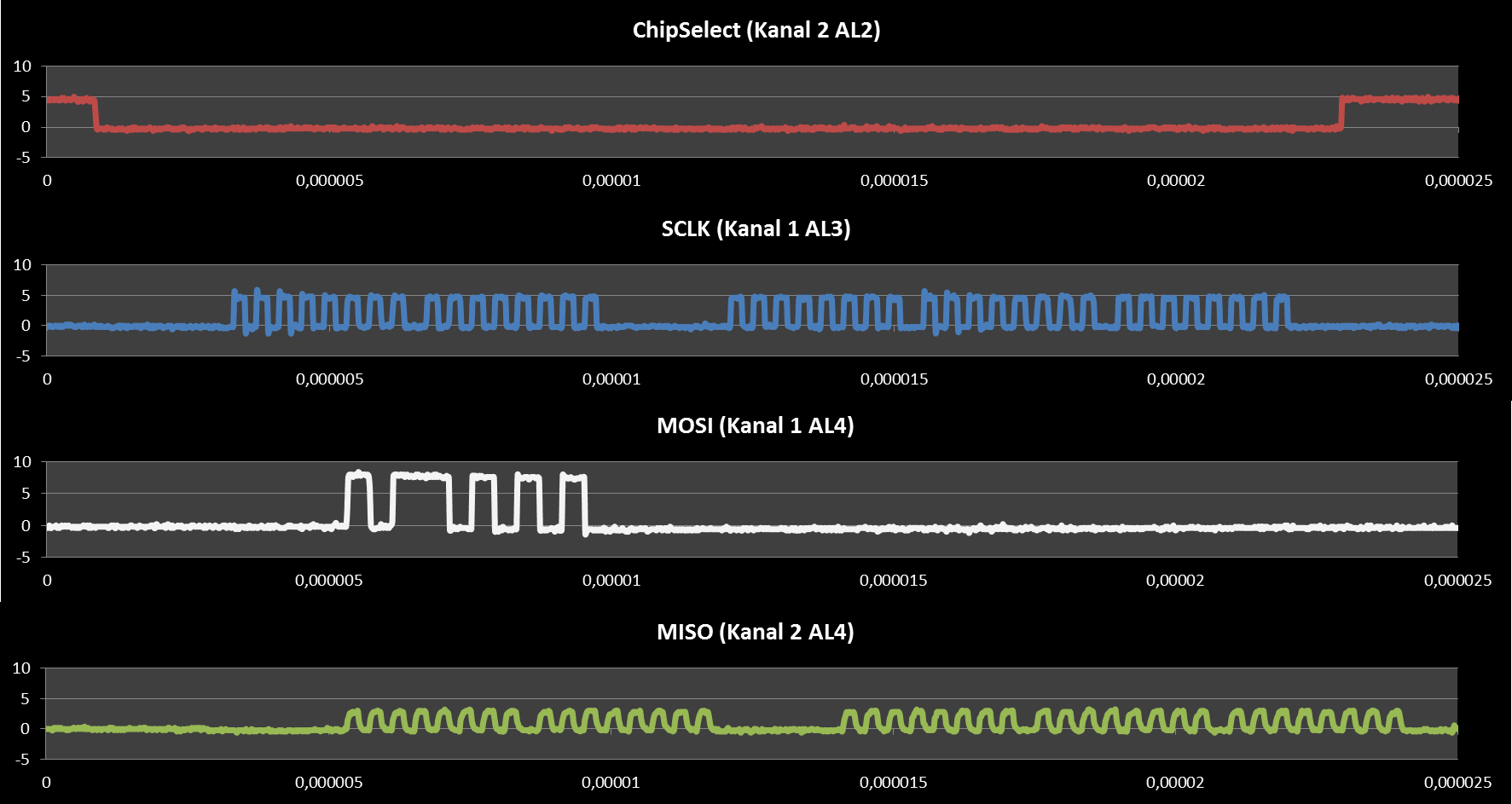
Im Anhang ist ein solcher Datenaustausch dargestellt (aufgenommen mit
Oszilloskop, jedoch nicht hundertprozentig synchron dargestellt).
Dabei wird klar ersichtlich, dass alle Kanäle die richtigen Ergebnisse
liefern, bis auf die MISO-Leitung, welche die Antwort des AD-Wandlers
beinhaltet. Komischerweise bekommen wir dort durchgängig eine leicht
zeitverzögerte Version unseres Clock-Signals, welches wir mit dem
Arduino erzeugen. Wir wissen diesbezüglich einfach nicht mehr weiter.
Unser Sketch sieht wie folgt aus:
1 | #include <SPI.h>
|
2 | // Variablen zum Speichern der Antwort-Bytes erzeugen
|
3 | byte AntwortByte1 = 0;
|
4 | byte AntwortByte2 = 0;
|
5 | byte AntwortByte3 = 0;
|
6 | // Benennung der Pins am Arduino Mega
|
7 | const int CS = 53; // Pin 10 beim Uno
|
8 | const int RST_PD = 54; // Pin für Reset/Power Down -> Dauer-High
|
9 |
|
10 | void setup()
|
11 | {
|
12 | // Pins definieren
|
13 | // Master Input, Slave Output
|
14 | pinMode(MISO, INPUT); // Pin 50 beim Mega, Pin 12 beim Uno
|
15 | // Master Output, Slave Input
|
16 | pinMode(MOSI, OUTPUT); // Pin 51 beim Mega, Pin 11 beim Uno
|
17 | // Ausgabe Taktsignal an ADC
|
18 | pinMode(SCK, OUTPUT); // Pin 52 beim Mega, Pin 13 beim Uno
|
19 | // Ausgabe Start der Kommunikation
|
20 | pinMode(CS, OUTPUT); // Pin 53 beim Mega, Pin 10 beim Uno
|
21 | digitalWrite(CS, HIGH); // Chip Select auf HIGH -> keine Kommunikation
|
22 | digitalWrite(RST_PD, HIGH); // Reset/Power Down auf HIGH -> Normalbetrieb
|
23 |
|
24 | // SPI-Schnittstelle initialisieren
|
25 | SPI.beginTransaction(SPISettings(500000, MSBFIRST, SPI_MODE1));
|
26 | // Schnittstelle für seriellen Monitor starten
|
27 | Serial.begin(9600);
|
28 | } // Ende des Setups
|
29 |
|
30 | void loop()
|
31 | {
|
32 | // ADC ansteuern
|
33 | digitalWrite(CS, LOW); // Chip Select auf LOW -> Start Kommunikation
|
34 | delayMicroseconds(10); // kurze Pause
|
35 | SPI.transfer(0x05); // erstes Anweisungs-Byte
|
36 | SPI.transfer(0xAA); // zweites Anweisungs-Byte
|
37 | delayMicroseconds(10); // kurze Pause
|
38 |
|
39 | // abspeichern der Antwort-Bytes
|
40 | AntwortByte1 = SPI.transfer(0); // Empfangen des ersten Antwort-Bytes, in Variable 1 abspeichern
|
41 | AntwortByte2 = SPI.transfer(0); // Empfangen des zweiten Antwort-Bytes, in Variable 2 abspeichern
|
42 | AntwortByte3 = SPI.transfer(0); // Empfangen des dritten Antwort-Bytes, in Variable 3 abspeichern
|
43 | digitalWrite(CS, HIGH); // Chip Select auf HIGH -> Ende Kommunikation
|
44 |
|
45 | } // Ende des Loops
|
Wir würden uns wirklich sehr über ein wenig Hilfe von Experten freuen!
Vielen Dank im Voraus!
Gruß