
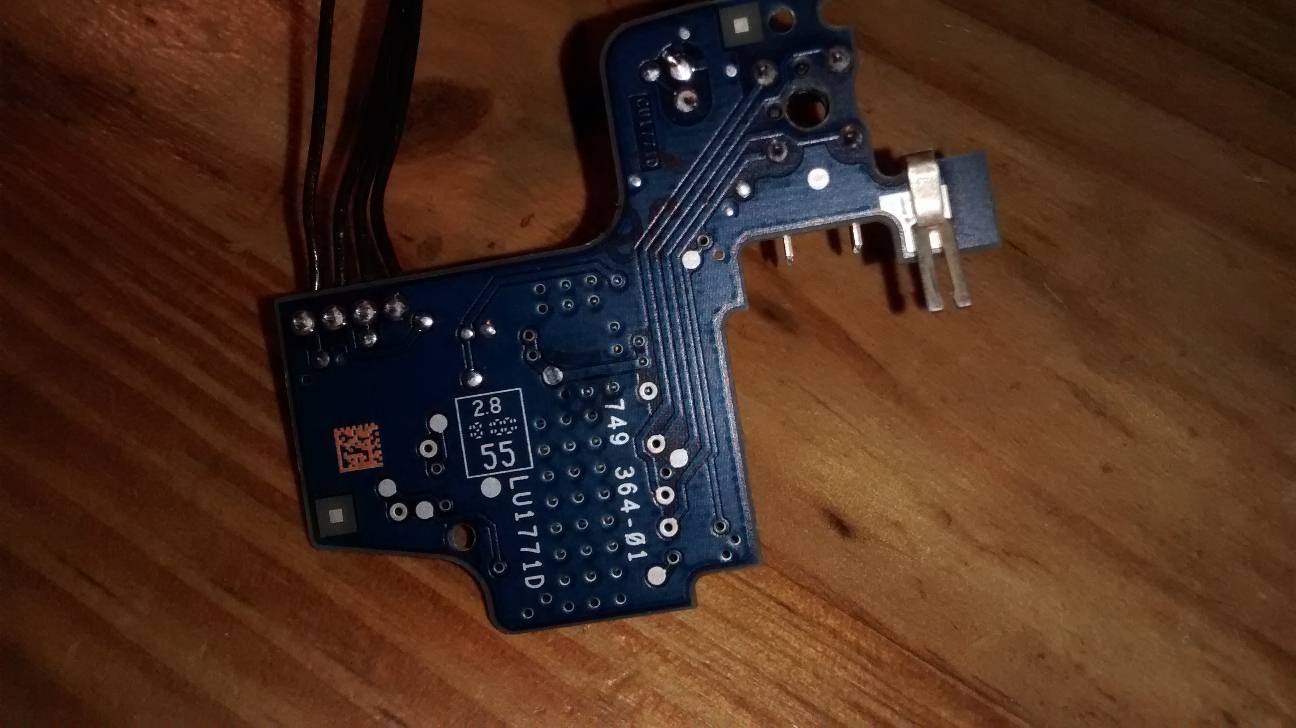
Hallo zusammen, ich benötige etwas Unterstützung bei der (möglichst einfachen) Ansteuerung eines Schrittmotors. Diese Steuerung besitzt einen AMIS-30623 . Siehe Datenblatt: http://www.datasheets360.com/pdf/8597921417053326304 Der Motor selbst dreht ein Zahnrad über eine Schnecke. Auf der Platine ist ein Steckplatz zu erkennen, dieser ist für einen Mikroschalter am Zahnrad (wohl Positionsgeber, schaltet über den Bereich von knapp einem Viertel des Drehumfanges, Konstruktion besitzt jedoch keinen Endanschlag). Die Elektronik besitzt 4 Anschlüsse. Vermutlich zwei für die 12V Versorgungsspanung, dazu also noch zwei Weitere für die Ansteuerung. Bei der Recherche bin ich hier gelandet und habe vom LIN-Interface erfahren, wovon ich keine Ahnung habe. Beitrag "? MCU mit LIN Interf. zum Ansteuern von bip. Schrittmotor" Ist es möglich auf einfacheren Weg diesen Controller anzusprechen? Erhofft hatte ich mir eine Lösung per PWM (Servotester wäre naheliegend und äußerst günstig) oder per Arduino Nano, wovon ich zwar auch keine Ahnung habe, mich aber seit ein paar Tagen intensiv mit beschäftige. Ursprünglich wollte ich mir die Mühe machen und die Anschlüsse zum Chip verfolgen. Was ich im Anschlussbereich für einen Spannungsregler hielt scheint mir nun zum Controller zu gehören, da dieser direkt 29V zu verkraften scheint. Lieber warte ich mal ab was ihr davon haltet, bevor ich versuche den kleinen Mosfet?/Transistor? zu recherchieren, um die Pins der Spannungsversorgung herauszufinden. Hier die Fotos: Gruß, Steffen
Angehängte Dateien:
-

obenklein.jpg
160 KB -

untenklein.jpg
120 KB
Hallo Steffen, wenn du keinen LIN-Master implementieren willst, dürfte es das einfachste sein, auf einen anderen Treiber zurück zu greifen. Mit freundlichen Grüßen Thorsten Ostermann
Hallo Thorsten, das scheint wirklich am sinnvollsten zu sein. Nach etwas Recherche hatte ich mir den ULN2003 Treiber, den es recht günstig auf Ebay und co gibt, als Plan B heraus gesucht. Mit dem werde ich es nun per Arduino probieren. Danke dir für die Antwort! Gruß, Steffen
Steffen S. schrieb: > Nach etwas Recherche hatte ich mir den ULN2003 Treiber... Der ULN2003 ist kein Schrittmotorentreiber sondern ein Darlington Array. Damit kannst du nur unipolare Schrittmotoren ansteuern. Der AMIS-30623 ist en Treiber für bipolare Schrittmotoren. Daher vermute ich, dass du einen bipolaren Schrittmotor hast.
Oh verdammt, das hatte ich nicht bedacht. Danke für den Hinweis. Der fünfte Anschluss wird wohl der Metallkontakt (auf dem Bild oben Links in der Ecke) sein. Ich hatte nur die 4 Leitungen gesehen. Ich bin auf ein paar Seiten gelandet, u.A. mit Antworten von Thorsten zu dieser Problematik, die mir verdeutlichen dass das so wohl nicht funktioniert. Alternativ stoße ich auf bezahlbare Alternativen wie: -A4988 -L298N -tb6612fng (welcher den L298N angeblich ersetzen soll*) Laut Ebay-Angebot* Zu allen finde ich Tutorials in Verbindung mit Arduino. Meistens ist der Motor dann zwar mit 4 Leitungen angeschlossen, aber bei all diesen Treibern steht deutlich bipolar-geeignet. Könnte das damit klappen oder weiterere Stolperfalle? Gerne suche ich Verweise zu Datenblättern, und Auktionen (falls erlaubt) heraus, aber eventuell ist einem von euch ja die Bezeichnung schon ein Begriff. Zu den Bedingungen: Die Steuerung kann ruhig mit 5V arbeiten, da bin ich relativ ungebunden und auch der Strom hält sich in Grenzen. Das angetriebene Zahnrad ist extrem leicht zu bewegen und die Übersetzung per Schnecke dürfte eine absolut aufs Grad genaue Einstellung überflüssig machen. V.G. Steffen
Welcher Motor? Wie schnell soll er drehen? Welche Last? Was ist der Unterschied zwischen einen uni- und bipolar stepper? Zu deinen Bedingungen: Beantworte die obigen Fragen. Wenn du selber Programmieren willst: http://www.embedded.com/design/mcus-processors-and-socs/4006438/Generate-stepper-motor-speed-profiles-in-real-time http://www.atmel.com/images/doc8017.pdf
Der L298 ist antiquiert, ausserdem fehlt da noch der L297 und 8 schnelle Dioden (BYV27), bis du eine funktionierende stromgeregelte Schrittmotorsteuerung hast. Nimm den A4988, der reicht für den kleinen Motor. Mit freundlichen Grüßen Thorsten Ostermann
Angehängte Dateien:
-

2016-06-18_15.55.25.jpg
110 KB -

2016-06-18_15.55.38.jpg
97 KB


Hallo! danke, wird gemacht. Hab den Motor nochmal ausgebaut. Also zwei getrennte Spulen, man erkennt die Anschlussdrähte, die überkreuz heraus zu den Anschlüssen laufen. Bezeichnung ist keine zu finden, der 5. Anschluss geht ans Gehäuse und ist derjenige, von dem ich sprach (auf der Platine zu erkennen, mit der Klammer). Hat also doch nix mit dem Abgriff in der Mitte der Spule(n) zu tun gehabt. Habe gestern erst bemerkt, dass ich in meinem letzten Beitrag etwas durcheinander geworfen habe mit den 4 bzw 5 Anschlüssen und dem Bi/Unipolar. Zurück zum Motor: Je Umdrehung zähle ich 10 Schritte, diese typische Polfühligkeit. Passt ja eigentlich auch zum Aufbau, wenn man den Motor axial betrachtet. Kraft braucht er kaum, denn er dreht über die Schnecke eine 10-20g schwere, kugelgelagerte Walze um etwa 270° in 4 feste Stellungen. Zu langsam sollte das wohl nicht ablaufen, aber rasend schnell muss auch nicht unbedingt. Bin mal gespannt ob das so alles funktioniert. V.G. Steffen
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.