Hallo, wie verhält sich die Motordrehzahl (im lastfreien Betrieb) zum PWM-Signal? Kann ich davon ausgehen dass bei PWM 50% der Motor mit etwas halber Drehzahl läuft? Der Motor ist ein Gleichstrom-Motor. Vielen Dank
Stefan schrieb: > Kann ich davon ausgehen dass bei PWM 50% der Motor mit etwas halber > Drehzahl läuft? Ja.
Stefan schrieb: > Danke für die schnelle Antwort!! Freu Dich nicht zu früh. Du brauchst eine halbe H-Brücke. Ein einzelner Schalttransistor ergibt eine höhere Drehzahl.
> Ein einzelner Schalttransistor ergibt eine höhere Drehzahl.
Warum das?
>Warum das?
Stell Dir einfach einen EIN/AUS Schalter vor. Motor ist im Leerlauf. Mit
ner kleinen Schwungmasse.
1sec EIN: Motor dreht hoch bis zum Beispiel 3000rpm
1sec AUS: Motor läuft langsam aus. Nach 1sec hat er noch 2500rpm
Man sieht gleich: keine 1500rpm im Mittel.
Gilt übrigens auch bei jedem (nichtsynchronen) Schaltregler, solange der Strom lückt.
> Freu Dich nicht zu früh. Du brauchst eine halbe H-Brücke. Ein Transistor + Freilaufdiode tut's auch. > 1sec EIN: Motor dreht hoch bis zum Beispiel 3000rpm > 1sec AUS: Motor läuft langsam aus. Nach 1sec hat er noch 2500rpm PWM nutzt man doch oft in der Art, dass der Strom während einer Taktperiode annähernd konstant bleibt, also mit deutlich höherer Taktfrequenz ...
Elektrofan schrieb: >> Freu Dich nicht zu früh. Du brauchst eine halbe H-Brücke. > Ein Transistor + Freilaufdiode tut's auch. Dazu muß der Motor von möglichst übler Qualität sein (quietschende Lager, verklebtes Getriebe). Wenn es darum geht, lastunabhängig eine proportionale Drehzahl zu erhalten, bietet sich eine einfache Regelung an: Beitrag "Drehzahlregler für DC-Motor, ATmega48-328" Weiter unten (11.07.2015 18:56) sind Bilder, welche PWM sich einstellt ohne und mit Belastung.
>> Warum das? > Stell Dir einfach einen EIN/AUS Schalter vor. Wenn der Transistor abschaltet fließt der induzierte Strom durch die Freilaufdiode. Bei einer Halbbrücke würde der Strom durch den zweiten Transistor fließen. Ich sehe da keinen nennenswerten Unterschied. Ohne Freilaufdiode wäre das sicher was anderes, aber ich kenne keine reale PWM Schaltung mit induktiver Last ohne Freilaufdiode.
Stefan U. schrieb: > Ich sehe da keinen nennenswerten Unterschied. Ohne Freilaufdiode wäre > das sicher was anderes, aber ich kenne keine reale PWM Schaltung mit > induktiver Last ohne Freilaufdiode. Wenn Du einen Motor allein als induktive Last betrachten willst, dann mußt Du seine Achse festschweißen.
m.n. schrieb: > Wenn Du einen Motor allein als induktive Last betrachten willst, dann > mußt Du seine Achse festschweißen. Wenn du ihn alleine als reale Last betrachten willst, dann ergäbe 50% PWM halbe Leistung am ohmschen Widerstand, also eine effektive Spannung von 0.707, und da die Drehzahl eines Motor von der effektiven Spannung abhängt nicht die halbe Drehzahl sondern 70% der Drehzahl. Man muss in dem Fall die PWM schon so schnell machen, daß der Motor sich als Induktivität auswirkt.
MaWin schrieb: > Man muss in dem Fall die PWM schon so schnell machen, daß der Motor sich > als Induktivität auswirkt. Klasse Idee! Man muß die PWM so zwischen 100 kHz - 5 MHz legen, damit der Motor dann auf halbe Drehzahl herunterkommt. Kleiner Nachteil: wenn man ihn dann belastet, bleibt er stehen :-( Noch einmal: man braucht eine halbe H-Brücke, wenn man den eingangs erfragten Effekt erhalten möchte. Damit funktioniert dann auch 'klupps' Beispiel von oben. Eine Sekunde dreht der Motor mit 2500 Upm und eine Sekunde steht er still. Mittelwert: 1250 Upm - wie gewünscht.
Angehängte Dateien:
-

mot_pwm2.png
21 KB
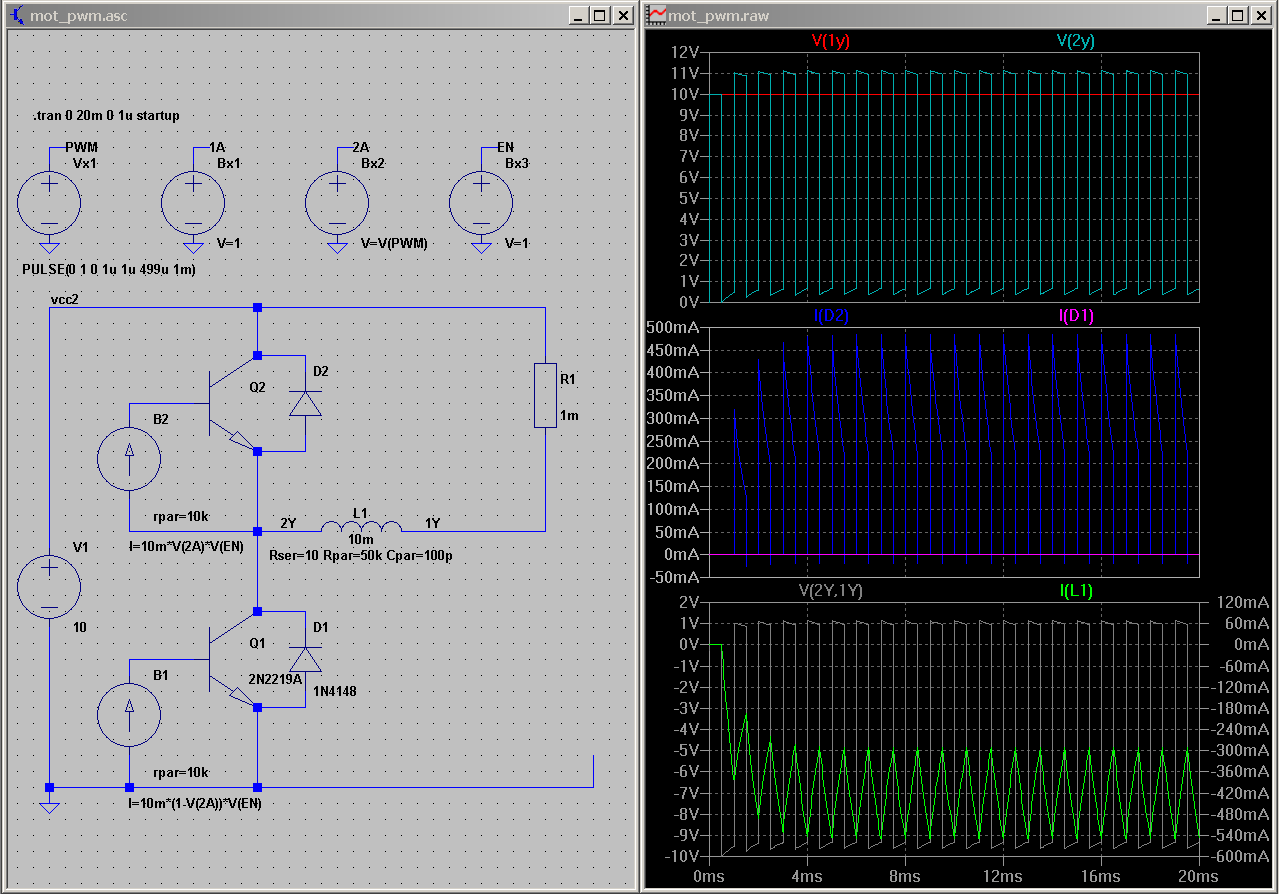
m.n. schrieb: > Noch einmal: man braucht eine halbe H-Brücke, wenn man den eingangs > erfragten Effekt erhalten möchte. Hatte letztens schon eine Simulation für das Prinzip eines L293 vorbereitet - war dann aber nicht mehr notwendig. Also schnell mal die zweite Seite entfernt. Eine Halbbrücke unterscheidet sich in genau Nix von einem Transistor+Freilaufdiode. Oder wolltest du D1 als Freilaufdiode sehen? Wenn es eine Brücke mit MOSFET ist, kann man während der Aus-Zeit Q2 zusätzlich ansteuern, aber nur um damit die Verluste zu minimieren. An der Funktion ändert sicht nichts.
> Klasse Idee! Man muß die PWM so zwischen 100 kHz - 5 MHz legen, damit > der Motor dann auf halbe Drehzahl herunterkommt. > Kleiner Nachteil: wenn man ihn dann belastet, bleibt er stehen :-( Bei DC-Motoren mit ein paar kW wird z.B. im kHz-Bereich getaktet. Dann ist die Welligkeit der Motorstroms schon einigermassen "glatt". Würde man viel langsamer takten, hätte man entsprechend stärkere Welligkeit. Genau das wäre aber für den Motor ungünstig (weil das Motormoment vom arithmetischen Mittelwert des Stromes abhängt, die Wicklungserwärmung aber vom Effektivwert).
lx293 schrieb: > Hatte letztens schon eine Simulation für das Prinzip eines L293 Wie hast Du denn die kinetische Energie simuliert?
> Eine Halbbrücke unterscheidet sich in genau Nix von einem > Transistor+Freilaufdiode. Hat man einen fremd- bzw. permanenterregten DC-Motor und will auch bremsen, geht das direkt (d.h. ohne Umschalten) nur mit der Halbbrücke.
Angehängte Dateien:
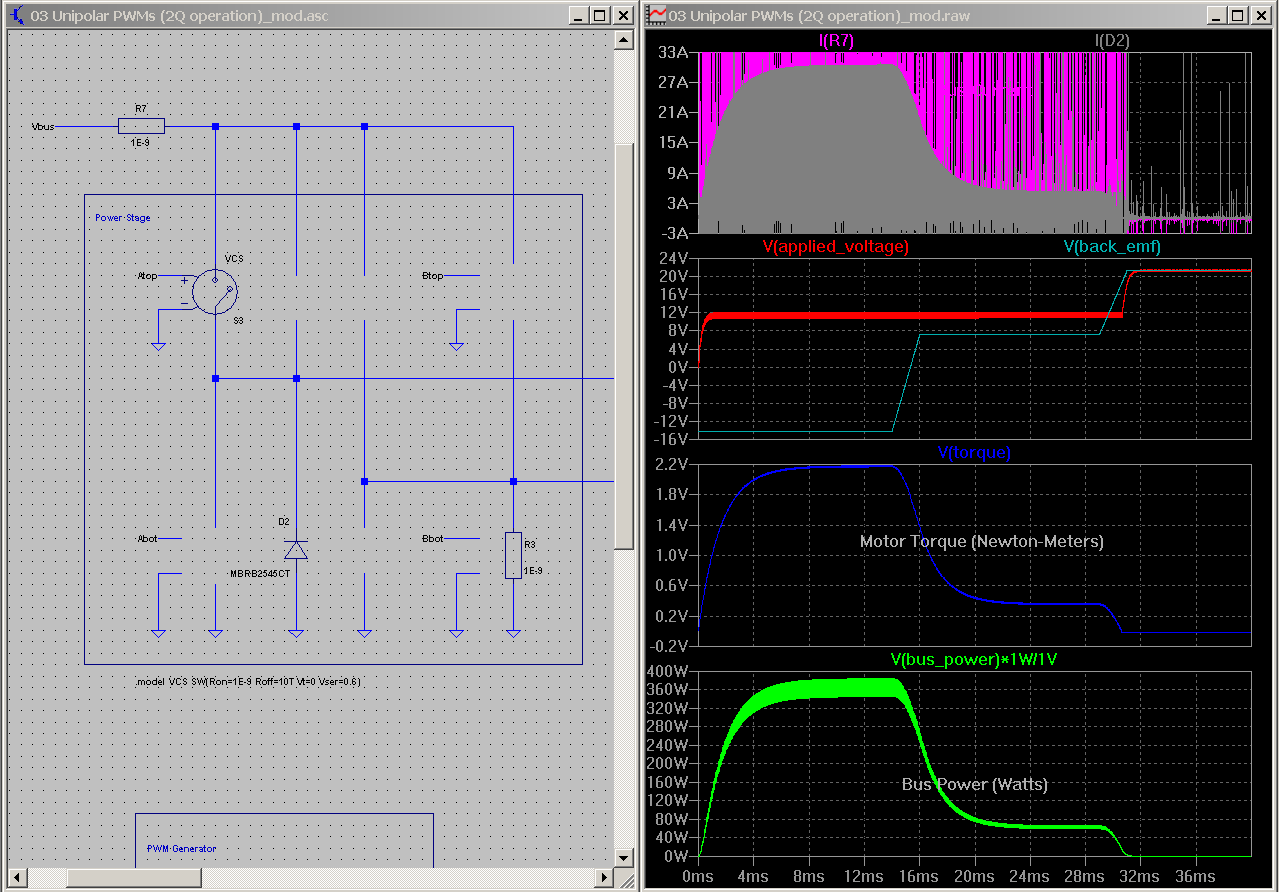
m.n. schrieb: > Wie hast Du denn die kinetische Energie simuliert? Das ändert am Prinzip/Beispiel nichts. Wenn es dich wirklich interessiert, versuche es einmal mit den Modellen von Dave Wilson (TI). Ich hoffe, dass die nichts dagegen haben, wenn ich die originalen zip-Dateien direkt anhänge und nicht erst den Link suche. Ich habe hier seine Version des 2-Q DC-Motors auf eine einfache PWM geändert, indem der Schalter VCS mit Vser=0.6 nur in eine Richtung durchlässig gemacht, eine "echte" Diode eingesetzt und die anderen Teile der Brücke entfernt wurden. An der PWM-Erzeugung wollte ich nicht drehen, daher wird High-Side getaktet.
> Bei DC-Motoren mit ein paar kW wird z.B. im kHz-Bereich getaktet. > Dann ist die Welligkeit der Motorstroms schon einigermassen "glatt". Die PWM-Frequenz ist tatsächlich nicht ganz unrelevant. Hab das an einem 200W-Motor auch mal durchprobiert. Zu langsame PWM (<100Hz) führt zu merklichen mechanischem Vibrationen, man kann das Ruckeln auch so spüren. Über ein paar kHz raus nimmt die Antriebskraft bei kleinen Tastverhältnissen stark ab. So bei 1-2kHz ist das Verhältnis Vibration vs. Linearität am Besten. Erstaunlicherweise hat der Motor beim Anfahren dann genauso gequietscht wie die dicken 1MW-Motoren der ET423 oder der neueren Siemens-U-Bahnen. Fand ich jedenfalls sehr amüsant ;)
Angehängte Dateien:
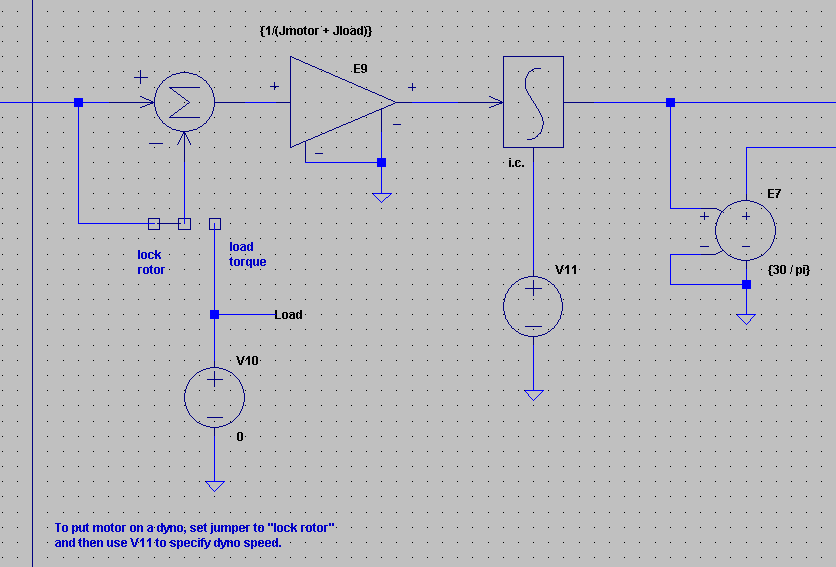
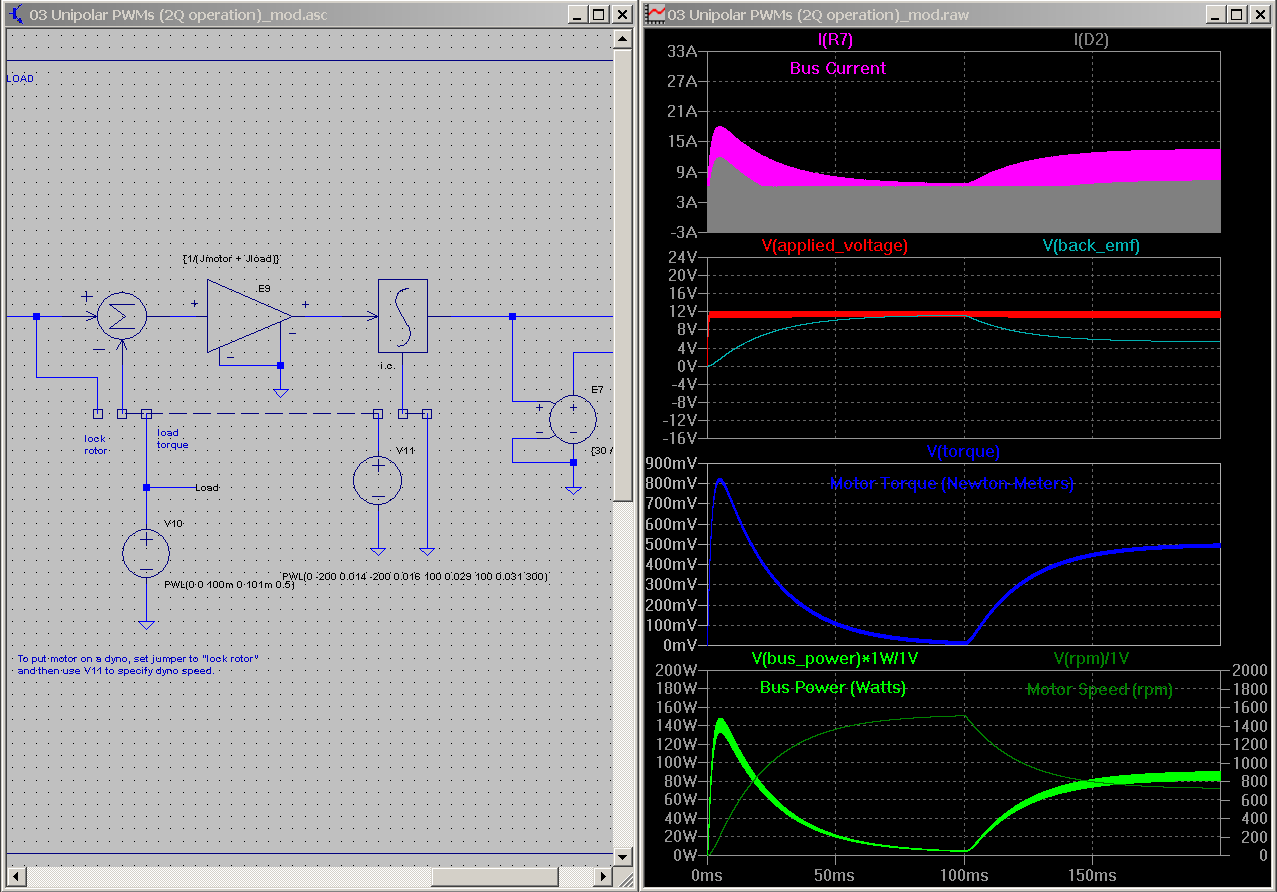
Habe gerade bemerkt (irgendwie kam mir der Verlauf der Back-Emf seltsam vor), dass im Original der Motor angetrieben wird (-200 -> 100 -> 300rpm). Daher umgebaut, so dass mit einfachem Verschieben der beiden Pads "umgeschaltet" werden kann (V10 Last: 1V=1Nm, V11 Drehzahl: 1V=1rpm). Auch dem Schalter etwas realistischere Werte gegeben, damit die Strom-Spikes die Ausgabe nicht komplett ruinieren. Als Anhang das Beispiel der PWM mit Anlauf im Leerlauf, nach 100ms wird eine Last von 0.5Nm zugeschaltet.
Stefan schrieb: > Hallo, > > wie verhält sich die Motordrehzahl (im lastfreien Betrieb) zum > PWM-Signal? > Kann ich davon ausgehen dass bei PWM 50% der Motor mit etwas halber > Drehzahl läuft? > Der Motor ist ein Gleichstrom-Motor. > > Vielen Dank Vereinfacht betrachtet: Ja. Schaut man genauer hin stellt man fest, dass es u.a. auch auf den Motor ankommt. Hier mal was interessantes dazu: www.olliw.eu/uploads/pwm-elektromotor-manuscript.pdf
> www.olliw.eu/uploads/pwm-elektromotor-manuscript.pdf
So weit ich das übersehen habe, wird dort genau berechnet, welche
Verhältnisse bei beliebiger Stromwelligkeit vorliegen.
Quintessenz:
Ist die Welligkeit zu vernachlässigen, verhält sich der Motor genau wie
an einer gleich grossen konstanten Gleichspannung (ideale Schalter
vorausgesetzt). Insbesondere ist die Drehzahlabhängigkeit vom Lastmoment
dieselbe.
Ist die Stromwelligkeit grösser, kann man munter drauflos rechnen...
Z.B. wird der Motor bei gleicher Drehzahl und Abgabeleistung wärmer, als
an Gleichspannung (Formfaktor des Stromes) u.v.m.
Demnach kann die zu wählende Taktfrequenz aus Sicht des Motors gerne
hoch sein, solange die Verluste im Steller noch akzeptiert werden
können.
Probieren geht über studieren!
Mein 1. Motor: Servomotor, 12V, 100W Nennleistung, 1800U/min
Betrieben mit 24V/PWM=20% ==> 685 U/min
PWM=40% ==> 1301 U/min
PWM=60% ==> 1857 U/min
2. Motor: Kleinmotor mit 24V Nennspannung, 2400U/min
Betrieben mit 24V/PWM=20% ==> 510 U/min
PWM=40% ==> 1140 U/min
PWM=60% ==> 1591 U/min
PWM=80% ==> 2383 U/min
24V direkt angeschlossen: ==> 2670 U/min
Stefan schrieb: > wie verhält sich die Motordrehzahl (im lastfreien Betrieb) zum > PWM-Signal? > Kann ich davon ausgehen dass bei PWM 50% der Motor mit etwas halber > Drehzahl läuft? > Der Motor ist ein Gleichstrom-Motor. Das waren jetzt x verschiedene Antworten basierend auf x Szenarien... Unter lastfrei verstehe ich jetzt mal "idealer Motor", also auch (fast) keine Reibung / Verluste. (Ganz ohne Verluste wirds blöd, weil alle Wirkwiderstände unendlich / 0 werden) Real wird die Drehzahl mit reduzierter Spannung (oder PWM) dann niedriger sein. Hilfreich ist dabei die Betrachtung 50% PWM = DC@50% Versorgungsspannung + AC(Rechteck)@50% Versorgungsspannung. Szenario #1 Strom lückt nicht (relativ egal ob mit Freilaufdiode oder Halbbrücke). Die PWM muss dafür ausreichend schnell sein gegenüber der Motorinduktivität. Dann liegt die Drehzahl bei 50%. Der AC-Teil wird durch die Induktivität komplett weggefiltert. Es bleibt eine Betriebsspannung von 50% DC. Szenario #2 Langsame PWM mit Freilaufdiode. Strom lückt. Drehzahl liegt über 50% (bis 100%). Während PWM-An wird der Motor evtl. bis auf 100% der Drehzahl @100%PWM beschleunigt. Reibung ist kaum vorhanden, damit geht in der Freilaufphase keine/kaum Drehzahl verloren. In der Stromlücke geht ebenfalls kaum Drehzahl verloren. Szenario #3 Langsame PWM mit Halbbrücke. Motor geht zeitweise in Generator-Betrieb über. Drehzahl bei 50% mit deutlichen Schwankungen/Oszillationen. (glaub ich zumindest, genaue Betrachtung ist mir grad zu kompliziert) Stephan
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.