Guten Abend.
Habe schon seit längerem die super Routine aus dem Forum hier im Einsatz
um Drehencoder aus zu lesen. Das klappt auch wunderbar (so lange ich
normal drehe...)
Jetzt ist mir bei einem Drehencoder aufgefallen, dass wenn ich ihn zu
langsam drehe (wirklich langsam...) das er aufeinmal beide Richtungen
erkennt. Drehe ich ihn normal (wie man ihn eigentlich dreht, klappt
alles wunderbar)...
Ich habe schon beide Tabellen hier aus dem Forum ausprobiert, bei beiden
das gleiche.
Kann ich diese Schritte "zwischen" der Rastung irgendwie raus filtern?
Ich brauche nur die Drehrichtung, incrementieren oder decrementieren
brauche ich gar nicht.
Dein Encoder hat also zwei Schritte pro Rastung?
Verwende auch eine entsprechende Auslese-Routine, die das
Wackeln/Prellen im Zwischenschritt rausfiltert.
im Codebeispiel hier: Drehgeber wäre es die "encode_read2".
Nein.
Wenn dem so wäre, würde es beim schneller drehen ja extrem auffallen.
Das ist aber nicht der Fall.
Regelrecht wenn ich den Encoder sehr langsam drehe, gerade dort wo er
nicht einrastet. Das heißt ich drehe innerhalb der Rastung.
Richard B. schrieb:> Jetzt ist mir bei einem Drehencoder aufgefallen, dass wenn ich ihn zu> langsam drehe (wirklich langsam...) das er aufeinmal beide Richtungen> erkennt.
Dein Encoder prellt.
Sowas ist normal.
Es gibt hier Leute, die auf Polling und softwaremäßige Entprellung
schwören, aber ich gehöre nicht dazu.
Mein Rat wäre deshalb, den Encoder hardwaremäßig zu entprellen.
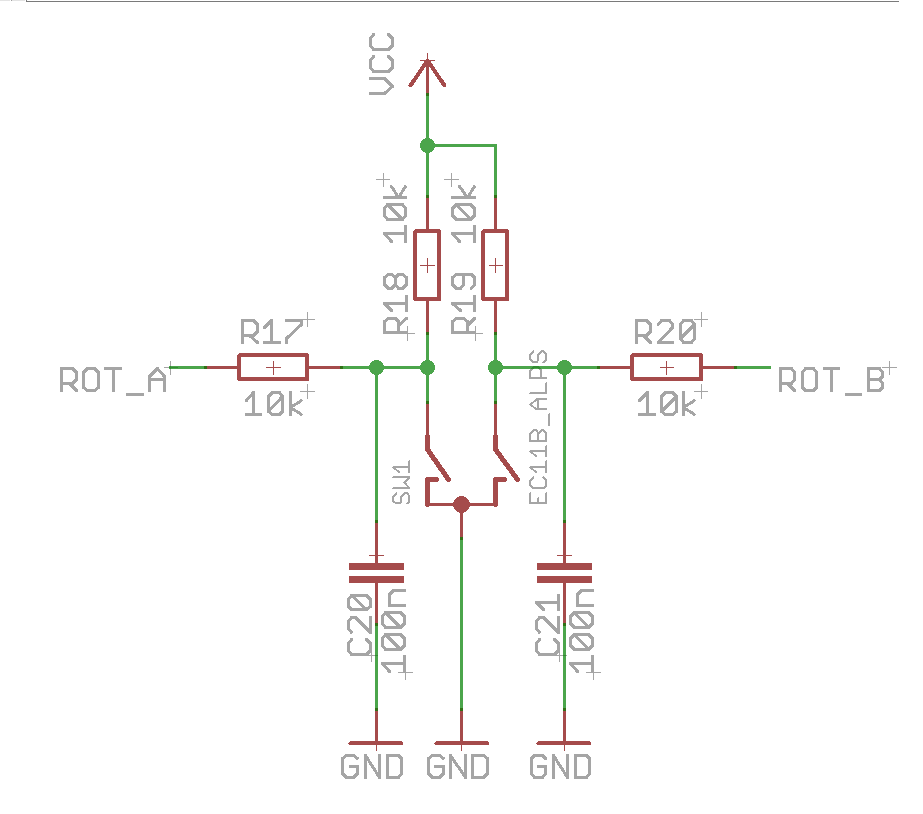
Das Einfachste ist ein 10..100nF Kondensator über die Kontakte.
Sowas hilft schon mal sehr. Wenn dann dein µC-Eingang auch noch
Schmitt-Trigger-Verhalten kann, ist die Sache hardwaremäßig komplett
erledigt.
Dann kannst du mit Interrupts arbeiten und bist mit dem Drehgeber fast
völlig unabhängig von der Drehgeschwindigkeit. Ich mache das seit vielen
Jahren so und bin's zufrieden.
W.S.
Richard B. schrieb:> Habe schon seit längerem die super Routine aus dem Forum hier im Einsatz> um Drehencoder aus zu lesen.
Hier gibt es Unmengen an Codebeispielen, die keiner alle im Kopf haben
kann. Du mußt schon den Link darauf posten.
Die ersten 3 Zeilen sind klar, die 4. müßte ein += enthalten, damit
aufwärts (x += 1) bzw. abwärts (x += -1) gezählt wird.
Der ganze Rest ist mir völlig unverständlich.
Und die spärlichen Kommentare sind nichtssagend. Ein Kommentar soll
nicht in Prosa wiederholen, was schon aus der Codezeile klar hervorgeht.
Sondern er soll sagen, warum man etwas macht.
Richard B. schrieb:> Ich brauche nur die Drehrichtung, incrementieren oder decrementieren> brauche ich gar nicht.
Das geht damit nicht. Die Entprellwirkung beruht darauf, daß ein Preller
wieder abgezogen wird.
W.S. schrieb:> Das Einfachste ist ein 10..100nF Kondensator über die Kontakte.
Die brennen beim Schließen des Kontaktes dann auch gleich die
Kontaktflächen etwas frei.
Richard B. schrieb:> Jetzt ist mir bei einem Drehencoder aufgefallen, dass wenn ich ihn zu> langsam drehe (wirklich langsam...) das er aufeinmal beide Richtungen> erkennt.
Ja, was soll der arme Kerl denn machen, wenn sich der Kontakt vom einen
Kanal an der Schaltschwelle immer öffnet und schließt. Das ist doch
völlig richtig, dass er dann immer vor- und zurück zählt. Schlimm wäre
es, wenn der Wert dann in eine Richtung weglaufen würde.
Was du brauchst, ist eine Hysterese in deiner Richtungsauswertung, die
verhindert, dass die Vor- und Rückzappelei an deinem Ausgang erscheint.
Richard B. schrieb:> Das heißt ich drehe innerhalb der Rastung.
Nenn das Kind ruhig beim Namen.
Du eierst auf dem Schaltpunkt des einen Encoderkanals rum.
Richard B. schrieb:> Kann ich die Hysterse auch in Software abbilden?
Scheinbar nicht, wenn du das fragen musst.
Falls die Frage eigentlich war: "Kann man die Hysterese auch in Software
abbilden?", dann ist die Antwort: Ja, natürlich kann man das.
Richard B. schrieb:> Wie bilde ich diese denn in Software ab?
z.B. so:
Εrnst B. schrieb:> im Codebeispiel hier: Drehgeber wäre es die "encode_read2".
nur jeder zweite Drehimpuls wird ausgegeben, das Rumgeeiere zwischen den
Rastungen weggerundet.
Du musst dafür sorgen, dass die selbe Flanke in beiden Richtungen für
die Zählung benutzt wird. Sonst hast Du eine Flanke, welche gerade
flattert, die in die eine Richtung Inkrementiert und in die andere
Richtung nichts tut. Logisch, dass dann Deine Zahl nach oben weg
wandert.
Mein Code (AVR ASM)
1
sbis PINA, 2 ; Abfrage der beiden Bits und Speicherung in tmp
2
ori tmp, 8
3
sbis PINA, 3
4
ori tmp, 4
5
6
LDI ZL, LOW(2*DrehgeberArray)
7
LDI ZH, HIGH(2*DrehgeberArray)
8
ADD ZL, tmp
9
ADC ZH, null
10
LPM tmp2, Z
11
ADD tmp1, tmp2 ; Wert aus der Tabelle an Position tmp zum Wert addieren
12
LSR tmp ; die uralten Bits aus tmp raus schieben, nur die alten behalten
13
LSR tmp
tmp enthält die beiden Bits vom Drehgeber der letzten beiden Abfragen
tmp1 ist das Ergebnis.
Meine Tabelle(n)
Richard B. schrieb:> Musste gestern feststellen, je langsamer ich werde, desto mehr> prellen> die Kontakte...
Hast du schon ausprobiert, die Pegelwechsel zwischen den Rastungen zwar
in der Statemachine mitzunehmen, aber im Hauptprogramm nicht
auszuwerten?
--> Drehgeber.
Oder liest du µC.net Wiki-Artikel aus Prinzip nicht?
Richard B. schrieb:> Musste gestern feststellen, je langsamer ich werde, desto mehr prellen> die Kontakte...
Das dürfte normal sein.
Bei hochwertigen Encodern ist die Phasenlage zwischen mechanischem Klick
und elektrischem Schaltvorgang definiert. Der Schaltvorgang erfolgt an
einer Stelle, wo die Kraft minimal ist, so dass man sich beim normalen
Drehen dort möglichst kurz aufhält.
Bei Billigencodern ist die Zuordnung mechanischer Klick <-->
elektrische Kontakt undefiniert und exemplarabhängig. Ich hatte schon
welche, die in der stationären Ruhelage geschaltet haben. Da reicht dann
schon Trafobrummen um ausreichend Vibration zu erzeugen um Pulse zu
generieren. Die Mark mehr für Alps oder Panasonic ist da schon gut
investiert.
Optische Encoder (Grayhill, Copal, etc) sind nahezu prellfrei.
Richard B. schrieb:> Musste gestern feststellen, je langsamer ich werde, desto mehr prellen> die Kontakte...
Du verstehst die Funktion überhaupt nicht, wahrscheinlich auch weil du
weder die Antworten hier noch Knowhow-Artikel dazu lesen willst. Die
Kontakte mögen prellen oder auch nicht, an einem bestimmten Punkt
schalten sie nun einmal um, das ist ihre Aufgabe. Und wenn man genau an
diesen Umschaltpunkt positioniert, bewirkt eben die kleinste Veränderung
das Umschalten; dass der Ausgang zwischen 0 und 1 hin- und herspringt
ist also völlig normal auch bei prellfreien Schaltern. Da aber eine
korrekte Auswertung dabei einen Schritt aufwärts zählt, beim
Zurückspringen aber wieder abwärts, wird der Zählerstand nicht
verfälscht.
Das Springen beim Umschaltpunkt kann nur durch eine Hysterese eliminiert
werden, aber der Drehencoder kann keine mechanische Hysterese haben,
daher muss die Hysterese in der Auswertesoftware realisiert werden.
Sofern das Auf/Ab in der letzten Stelle überhaupt stört.
Georg
Ralf schrieb:> Wenn man 4 Widerstände und 2 Kondensatoren in SMD-Bauform "spendiert",> erspart man sich langwieriges Anpassen des Programmes.
Evtl. gibt es ja Stecksockel für den Drehgeber. Der findet das nämlich
nicht witzig, ständig den Kondensator kurz zu schließen.
Gruß
Jobst
Eine Hardware ist keine Lösung.
Wenn der Encoder an seinem Schaltpunkt schaltet, ist das seine Aufgabe.
Ein RC-Netzwerk gibt dieses Schalten auch weiter, muß es ja auch, sonst
ist der Encoder sinnbefreit.
Wenn das Netzwerk das Umschalten weitergibt, wird immer ein
nachgeordneter Zähler zählen. Soll er j auch.
Also hilft ein Netzwerl nix gegen das Schalten am Umschaltpunkt.
Das einzige was hilft: die Umschaltungen richtig interpretieren.
... Aber das überlassen die Spezialisten ja einem RC-Netzwerk. So wird
das nix. Nicht heute und nicht zu einem anderen Zeitpunkt.
Jobst M. schrieb:> Evtl. gibt es ja Stecksockel für den Drehgeber.
Eventuell gibt es auch Stänkerer.
> Der findet das nämlich> nicht witzig, ständig den Kondensator kurz zu schließen.
Ich habe das in dieser Form bei > 10 Geräten mit den unterschiedlichsten
Typen seit Langem im Einsatz. Es kümmert sie alle nicht im Mindesten,
daß sie mit ihren Kontakten die beiden Kondensatoren kurzschließen.
soul e. schrieb:> Bei Billigencodern ist die Zuordnung mechanischer Klick <-->> elektrische Kontakt undefiniert und exemplarabhängig.
Manchmal hilft es dann, die beiden Anschlüsse des Drehencoders
zu tauschen. Normalerweise ist bei richtiger Auswertung das
Prellen der Kontakte unwichtig und muss nicht hardwaremäßig
entfernt werden. Allerdings kann Dauerprellen durch Vibrati-
onen den µC unnötig beschäftigen.
Ralf schrieb:> Eventuell gibt es auch Stänkerer.
... könnte seinen Grund haben ...
Ralf schrieb:> Ich habe das in dieser Form bei > 10 Geräten mit den unterschiedlichsten> Typen seit Langem im Einsatz.
Ich habe >10 Drehgeber in einer Matrix in einem Gerät im Einsatz.
Die Anzahl spielt keine Rolle. Wenn es bei einem Gerät funktioniert,
wird es auch bei anderen Geräten funktionieren. Du hast ja auch selber
schon festgestellt, dass Deine zuerst gepostete Schaltung nicht richtig
gewesen ist. Dennoch ist der Einsatz von Kondensatoren überflüssig. Die
Software muss einfach richtig arbeiten.
Gruß
Jobst
{kind=link}