Hallo liebes Forum Ich wage mich an ein Projekt, einen Kamera Slider. Ich möchte den Slider an einer Schiene wenn möglich langsam als auch relativ schnell Bewegen. (ca. 1m innerhalb von 5 Sek.) Hier ein Video dessen was ich nachbauen möchte. https://www.youtube.com/watch?v=C6uR73yHTN0 (ab 0:53 kommt das um was es mir geht) Ich habe hier einen Raspberry Pi 3 über welchen ich das ganze Steuern möchte. Nun meine Frage an euch: Was würdet Ihr sagen wäre der Beste Motor für sowas. Eher ein normaler Brushless oder eher ein Schrittmotor? Ich dachte ja an eine Kombination von Schrittmotor mit einem Inkrementalgeber zur Ermittlung der relativen Position. Ich möchte nämlich auch so eine Recordfunktion realisieren. Also Record drücken, den Schlitten an eine andere Position fahren und die Zeit in Sekunden angeben. Dann soll automatisch ermittelt werden können wieviele Schritte der Motor machen muss das er innerhalb der Zeit an Punkt B ankommt. Freue mich schon auf eure Vorschläge... Grüße Sascha
:
Bearbeitet durch User
Schrittmotor bietet den Vorteil das er sehr genau zu positionieren geht da reichen dir schon 1-2 Endschalter. Nachteil wenn du die Steuerung nicht gut und fein machst hast du Vibrationen, ruckelige aufnahmen und manchmal sind sie dabei noch recht Laut. Mit einer sehr guten Microschritt ansteuerung ist das allerdings fast kein Thema mehr. Ein Deutlicher Vorteil von Brushless ist die Geschwindigkeit. Mit einem Schrittmotor könnten 5m/Sek schwierig werden
Hallo Johannes Die Lärmentwicklung ist für mich jetzt zum Glück weniger relevant da der Ton meist extern aufgenommen wird. Aber dennoch sollte das ganze natürlich nicht ZU laut werden. Ich denke, die Schrittmotoren haben den Vorteil das sie auch viel Kraft haben und ich hier nicht so viel mit einer Übersetzung spielen muss. Ich habe einen 3D Drucker und muss sagen, wenn es sein muss läuft der schon ziemlich schnell von A nach B. 5m/Sek. muss ich ja zum Glück nicht machen. Eher 10-20cm/sek. Vielleicht noch Vorschläge? Gibt es noch andere Möglichkeiten welche ich jetzt vor lauter Bäumen nicht sehe? Grüße Sascha
Hi, was mit Schrittmotoren möglich ist, und was nicht, kannst du ja ungefähr selber beurteilen. Ich würde in deiner Situation auf jeden Fall einen Eisen-losen (Glockenanker-) Motor einsetzten. So ein Motor hat kein magnetisches Haltemoment ist daher für geringe Drehzahlen geeignet. Der Motor allein tut es nicht. Mit geringem Aufwand kann man viel, mit großem Aufwand kann man sehr viel erreichen. 1. DC-Kollektor-Motor: 1.a. Einfache Ansteuerung mit DC bzw. PWM. Guter Langsamlauf nur ohne oder bei sehr geringer Last. 1.b. Mit Kompensation des ohmschen Wicklungswiderstands (DC, nicht PWM): Erheblich verbesserter Langsamlauf bei Last. 1.c. Mit Tachogeber: Fast perfekter Langsamlauf, wenn auch nicht bis zum Stillstand, aber der Aufwand steigt natürlich 1.d. Mit Positionsgeber: Perfekter Langsamlauf, auch bis zum Stillstand. Erheblicher Aufwand. Hält die Position auch im Stillstand. 2. Bürstenloser DC-Motor (BLDC) Lässt sich durch 3-phasige Ansteuerung ähnlich wie ein Schrittmotor betreiben. Ist mit obigen Regelschaltungen auch zu verbessern. Der Übergang vom BLDC ohne Sensoren über einen BLDC mit Sensoren zum Kollektormotor ist fließend. Die Thematik wird immer komplexer. Hersteller für Glockenankermotoren sind u. A. Faulhaber, Maxon und wahrscheinlich noch mehr. Ich habe sogar noch welche von Philips... Leider tut es nicht nur der Motor, denn auch ein passendes Getriebe gehört dazu. Alles nicht billig. Ich würde mit einem Kollektormotor mit ca. 10 W Leistung anfangen und Erfahrungen mit dem Ansatz 1.b. sammeln. Grüße, DZDZ
Sascha P. schrieb: > Schrittmotor mit einem Inkrementalgeber Mit Inkrementalgeber kannst du auf den Schrittmotor verzichten und einen DC Motor nehmen. Vorteil ist er läuft ruhiger. Bei den Profis geht der Trend momentan auch weg vom Schrittmotor hin zu 3 Phasen BLDC (ein Kompromiss aus alten/teuren aber laufruhigen 5 Phasen Motoren und billigeren Schrittmotoren).
Stepper und silent step stick sollte es tun. Allerdings könnte dann ein kleiner uC besser geeignet sein um die takte zu erzeugen als ein pi.
Hallo DZDZ Danke für deine sehr detailierte Antwort. Ich verstehe nun zwar nur einen Teil deiner Antwort (bin noch am Googeln GG) aber ich glaube zu verstehen. Leider finde ich bei den üblichen verdächtigen nichts passendes. (Conrad, Reichelt) Hast du vielleicht einen Link zu einem passenden Kollektormotor? Wie man den am besten ansteuert muss ich mir dann sowieso ansehen. Wegen Getriebe, muss ich dann sowieso sehen wie ich das mache und was ich brauche, das muss ich dann einfach probieren. Da ich einen 3D Drucker habe kann ich ja verschiedene Übersetzungen Testen wenn es soweit ist. Schöne Grüße Sascha
Hallo Sascha, ich habe mir jetzt erst den Link angesehen. Ich gehe davon aus, dass du nicht die gleiche Leistungsfähigkeit und Präzision anstrebst. Und ich gehe auch davon aus, dass du kein Serienprodukt entwickeln willst. Die Motoren gibt es auch nicht so einfach beim Händler um die Ecke oder Distri. Aber etwas Passendes findet man gelegentlich in ebay. Zurzeit ein 2230 012S, der könnte schon passen. (https://fmcc.faulhaber.com/details/overview/PGR_1203_13818/PGR_13818_13813/de/DE/) Ich habe früher relativ intensiv sehr ähnliche Produkte entwickelt. Auch für Video, aber es ging um die Ansteuerung von Schwenk-Neigeköpfen, also Rotation statt Translation. Du willst das realisieren, was wir eine Positionssteuerung genannt haben: Auf Kommando von einer Position zu einer anderen Position fahren, dabei bestimmte Beschleunigungen und Geschwindigkeiten einhalten. Für die Bestimmung der Position reicht hier ein einfaches Poti am Abtrieb aus. Ein Inkrementalgeber auf der Motorachse würde erst für viel höhere Ansprüche erforderlich. Die Motorleistung wird nicht für die Endgeschwindigkeit, sondern für die Beschleunigung gebraucht. Die Getriebeuntersetzung ergibt sich nicht durch Probieren, sondern aus der max. Motordrehzahl und der gewünschten max. Geschwindigkeit, aber das sollte eigentlich bekannt sein. Aus dem max. zul. Motordrehmoment bzw. Drehmoment oder Kraft am Getriebe-Abgang sowie der bewegten Masse ergibt sich dann die max. zul. Beschleunigung. Ich glaube, dass die 10 W, die ich oben genannt habe, in deinem Fall viel zu viel wären, aber das lässt sich vorab berechnen. In der Ansteuerung wird dann die Motorspannung gleichmäßig hoch- bzw. herunter gefahren, so dass sich eine weitgehend konstante Beschleunigung ergibt. Ein sanftes Anfahren ist in jedem Fall empfehlenswert, denn das plötzliche Einsetzen einer konstanten Beschleunigung führt zu Rucklern. Der µC muss berechnen, wann der Verzögerungsvorgang eingeleitet werden muss, um im richtigen Moment zum Stillstand zu kommen. Das geht nicht ganz exakt, wenn nur ein Poti am Abtrieb die Ist-Postion meldet, aber es reicht. Zur Kompensation des ohmschen Wicklungswiderstands sollte es reichlich Infos im Netz geben. Das ist keine Raketenwissenschaft, aber mit ein paar Sätzen hier auch nicht erklärt. Grüße, DZDZ PS: Einen Kamera Slider hätte ich auch gerne....
Nachteil Getriebemotor: - man kann den Slider nicht von Hand verschieben, man muss immer mit Strom fahren. - wählt man das Getriebe mit einer hohen Übersetzung aus, dann kann man sehr fein bei Timelaps positionieren, jedoch ist die max. Verfahrgeschwindigkeit begrenzt, oder andersherum. Nachteil Schrittmotor: - wenn der Strom weg ist, und der Slider schräg steht, gibt es kein Halten mehr - der Wagen auf dem Slider, samt Kamera rutscht weg ... - im Gegensatz zum Getriebemotor, die schon bei kleineren Spannungen drehen, braucht man beim Schrittmotor ~ 10-12VDC, oder mehr, wenn man etwas Beschleunig/Drehmoment haben möchte. Kleiner Getriebemotor verbraucht so gut wie keinen Strom, ideal bei Akkubetrieb und Langzeitaufnahmen. Ein Schrittmotor benötigt recht viel Leistung um alles am Platz zu halten - 2-500mA, ansonsten wie oben geschrieben verliert er die Postition. - Vor- oder Nachteil Schrittmotor, je nach dem wie man es dreht. Man kann den Slider von Hand positionieren, je nach Geschwindikeit kann man aber auch den Treiber für den Schrittmotor durch die induzierte Spannung zerstören. Die Programmierung vom Getriebmotor ist simpel, an/aus und die Richtung. Optional Geschwindigkeit mit PWM. Bei Schrittmotor, je nach gewünschter Performance, muss man sich auch den einen oder anderen Gedanken an eine Beschleunigungs- und Bremsrampe machen. Schrittmotor hat den Vorteil, 1 oder 2 Endschalter setzen, an diesen die Referenzmarke holen und über die Impulse die gewünschte Position mm genau anfahren. Selbst Fahrprogramme sind damit schön machbar.
Zu timeSlider: Teilweise Zustimmung, aber: 1. Ein Glockenanker-Getriebemotor läuft so leicht, dass er sehr wohl von Hand bewegt werden kann, wenn er stromlos ist. Und damit ist er noch weniger selbsthaltend als ein Schrittmotor. Wir mussten Schwenk-Neigeköpfe mit einer Bremse ausstatten, weil sonst schon ein stärkerer Wind den Kopf bewegen konnte(!). 2. Bei beiden Motoren muss man sich zwingend Gedanken um eine Beschleunigungs- und Bremsrampe machen. Ruckartiges Anfahren und Bremsen geht gar nicht.
Der Zahn der Zeit schrieb: > 1. Ein Glockenanker-Getriebemotor läuft so leicht, dass er sehr wohl von > Hand bewegt werden kann, wenn er stromlos ist. Und damit ist er noch > weniger selbsthaltend als ein Schrittmotor. Wir mussten > Schwenk-Neigeköpfe mit einer Bremse ausstatten, weil sonst schon ein > stärkerer Wind den Kopf bewegen konnte(!). Mit welcher Übersetzung?
Der Zahn der Zeit schrieb: > 1. Ein Glockenanker-Getriebemotor läuft so leicht, dass er sehr wohl von > Hand bewegt werden kann, wenn er stromlos ist. Dann brück einfach die Ausgänge.
timeSlider schrieb: > Mit welcher Übersetzung? Max. Abtriebsdrehzahl ca. 30 U/min. Also ca. 300 : 1. aSma>> schrieb: > Dann brück einfach die Ausgänge. Auch dir sollte klar sein, dass das gegen Kriechen nicht hilft.
Sascha P. schrieb: > Ich habe hier einen Raspberry Pi 3 über welchen ich das ganze Steuern > möchte. Nun meine Frage an euch: Was würdet Ihr sagen wäre der Beste > Motor für sowas. Eher ein normaler Brushless oder eher ein Schrittmotor? Für den Eigenbau ist ein Schrittmotor vermutlich besser, da einfacher zu steuern. Mach es doch einfach. Das Hauptproblem sehe ich eher beim mechanischen Aufbau (Masse, Reibung, Resonanzen), sofern Du ihn auch erledigen möchtest.
m.n. schrieb: > Resonanzen SilentStepStick TMC2100 Schrittmotortreiber, damit geht es ganz gut. DRV8825, A4988 usw kann man gleich beiseite legen ...
timeSlider schrieb: > m.n. schrieb: >> Resonanzen > > SilentStepStick TMC2100 Schrittmotortreiber, damit geht es ganz gut. > DRV8825, A4988 usw kann man gleich beiseite legen ... So pauschal? Ich denke, es kommt sehr auf die bewegten Massen und den eigenen Anspruch an. So, wie ich das obige Video in Erinnerung habe, sind die Bewegungen dort nicht unbedingt sehr weich.
m.n. schrieb: > So pauschal? Nein, Erfahrung(en) mit den obenen genannten Treibern ( an verschiedenen Anwendungen). Mein Slider ist 1m lang, und hat mich Nerven gekostet. Mit dem Silentstick war es ruhig, egal welche Beschleunigung, Geschwindigkeit oder Kamera (Gewicht) montiert ist.
Hallo Leute Leider komme ich erst jetzt zum Antworten. Erstmal. WOW. Echt tolle Antworten, hier macht man sich echt Gedanken vor dem Antworten. Ein Dickes Lob erstmal an alle und Danke für die vielen Vorschläge. @DZDZ Echt super Vorschläge. Da ich noch dabei bin mir den Mechanischen Teil auszubauen kann ich noch nicht direkt probieren. Die Tage sollte ich den den Slider soweit zusammengebaut haben das ich Ihn per Hand bewegen kann. Ich warte noch auf ein paar Teile (Riemen, Kugellager). Sobald ich das fertig habe kann ich schon mal zum Testen anfangen. Ich habe hier einen DC Motor aus einem RC Flugzeug inkl. Motorsteuerung liegen mit dem ich ja mal ein wenig rumprobieren kann. Einen Kamerakran mit 2 Achsen Remotehead habe ich mir bereits gebastelt. Da nahm ich einfach Getriebemotoren. Funzt super. Aber so ein Slider ist nochmals ein großer Schritt, wie du merkst bin ich nicht wirklich mit der Materie vertraut. Also, soweit ich das richtig interpretiere tendierst du eher zum DC Motor als zum Schrittmotor richtig. Bergauf und Bergabfahren wären toll, muss aber sagen das ich darauf verzichten kann. Ich glaube das könnte das Teil in dem Video auch nicht. Für vetikale Fahrten würde ich ja ohnehin den Kran nehmen. (Den hab ich ja und ist mit 4m auch gar nicht so klein.) @timeSlider Danke für deine Antworten. Das kommt mir dann ja wohl zu gute das dich dein Slider bereits viele Nerven gekostet hat. :-) Das mit dem SilentStepStick Treiber klingt ja echt gut. Wenn der wirklich sehr fein Anfahren kann muss ich nur noch schaun wie schnell ich damit fahren könnte. Dann würde ich mir vermutlich auch eine Übersetzung sparen. Kannst du zu dem Treiber vielleicht auch einen Motor empfehlen? Vielleicht finde ich ja diesbezüglich was z.b. bei Reichelt, dann kann ich das ja mal ausprobieren. Hast du vielleicht ein Video von deinem Slider, würde mich interessieren... Tja, nur stehe ich nun wieder zwischen dem DC und dem Stepper. Aber ich bin um einiges schlauer und habe heute viel gelernt. Danke euch. PS: Habe heute bereits den DC Motor zum laufen gebracht und diesen über den PI per Touchscreen von langsam bis schnell laufen lassen. Klappt schon über einen Schieberegler am Screen. Bin stolz ;-) Wenn so eine Bastelei nur nicht immer so viel spaß machen würde.... Grüße Sascha
Hallo Leute Was haltet Ihr von diesem Schrittmotor?? Sehe ich das richtig das ja im Grunde alles oben ist was ich brauche? Treiber ist ja bereits hinten drauf. Weis jemand wie der Programmiert wird, man muss ihm ja irgendwie sagen in welchem Modus er fahren soll oder? https://www.reichelt.de/Schrittmotoren/PD42-3-1070/3/index.html?ACTION=3&LA=446&ARTICLE=190067&GROUPID=8040&artnr=PD42-3-1070&SEARCH=schrittmotor Grüße Sascha
:
Bearbeitet durch User
Ich verwende diese Motor: 17HS19-2004S Vorher hatte ich es mit sm-42byg011-25 und SY42STH47-1684A versucht, war aber nicht zufriedenstellend (schräg gestellt, mit großer Kamera war nicht berauschend). >> Datenblätter im Anhang, kannst Dir die Kenndaten anschauen und selbst vergleichen. Und diesen Schrittmotortreiber: http://www.watterott.com/de/SilentStepStick Ich habe relativ großes Zahnriemenrad mit 40 Zähnen verwendet ( War schon vorhanden). Wenn man kleiner Zahnriemenräder verwendet hätte man ja mehr Drehmoment dafür weniger Endgeschwindigkeit, 16 o. 20 Zähne ist recht gängig (3D Drucker).
Hallo timeSlider, > m.n. schrieb: >> So pauschal? > > Nein, Erfahrung(en) mit den obenen genannten Treibern ( an verschiedenen > Anwendungen). Mein Slider ist 1m lang, und hat mich Nerven gekostet. Mit > dem Silentstick war es ruhig, egal welche Beschleunigung, > Geschwindigkeit oder Kamera (Gewicht) montiert ist. Du meinst aber vermutlich nicht die nackten Chips (die sind i.A. durchaus brauchbar), sondern die schlecht gemachten Motorshields mit diesen ICs?! Mit freundlichen Grüßen Thorsten Ostermann
@TimeSlider Ich würde den Treiber bestellen und dachte mir das ich den Schrittmotor evtl. gleich von selben Lieferanten nehme. Da ich mich nicht so gut auskenne... was haltest du von diesem Motor. Kann man den nehmen?? http://www.watterott.com/de/Stepper-Motor-Bipolar-200-Steps/Rev-4238mm-28V-17-A/Phase Dann könnte ich gleich bestellen ;-) Brauche ich sonst noch was?? Außer das hier: http://www.watterott.com/de/SilentStepStick-Protector Kühlkörper werde ich noch dazu bestellen. Besten Dank für die tolle Hilfe. Grüße Sascha
Oh Habe gerade gesehen das das der Motor ist mit dem du nicht so zufrieden warst. Mist. Aber da schräge fahrten nicht so zwingend erforderlich sind (für mich) kann man den nehmen oder???? Grüße PS: Sorry falls ich nerve, ich kenne mich mit solchen Sachen nicht so aus. Aber ich denke mit eurer Hilfe (ihr seit ja der Wahnsinn) bekomme sogar ich das hin. Haha Bin schon gespannt ob ich den Treiber dann angesteuert bekomme mit dem Pi. Macht echt Spaß, selbst wenn der Ausgang noch ungewiss ist. Grüße Sascha
Sascha P. schrieb: > Ich würde den Treiber bestellen und dachte mir das ich den Schrittmotor > evtl. gleich von selben Lieferanten nehme. Da ich mich nicht so gut > auskenne... was haltest du von diesem Motor. Kann man den nehmen?? > > http://www.watterott.com/de/Stepper-Motor-Bipolar-200-Steps/Rev-4238mm-28V-17-A/Phase Lese meinen letzten Beitrag genau , schau in deinem Link das Datenblatt an ( Tipp: es reicht die Typenbezeichnung des Motors im Datenblatt). Thorsten O. schrieb: > (die sind i.A. > durchaus brauchbar) durchaus brauchbar = gerade so ertragbar? - wenn man keinen Bock auf Performance hat, sind die wirklich brauchbar ...
Ja, sorry Ich hatte zu spät nachgesehen. Tut mir echt leid!! Ich dachte nie daran das ich zufällig den selben erwische. Jetzt habe ich nur die Werte verglichen. Mir gefiel das er mit 2,8V läuft. (Echt wenig) Grüße Sascha
Hi Sascha, cooles Projekt. Du machst Standbilder und/oder Video? Was schraubst Du denn auf den Schlitten? Bei Video (Du erwähntest Tonaufnahme) hast Du natürlich deutlich höhere Anforderungen an die Laufruhe und Geräuschentwicklung. Komplette Antriebslösungen (Motor+Steuerung) bekommst Du z.B. bei http://de.nanotec.com. Oder Du fragst bei isel.com nach kompletten Spindeleinheiten. In beiden Fällen würde ich empfehlen mal mit dem technischen Vertrieb das Thema zu besprechen. Grüße, marcus
Hallo Markus Es geht mir zu 98% um Videoaufnahmen. Ton ist sekundär ein Thema da fast immer der Ton extern aufgenommen wird. Außerdem kommt ohnehin ein Gehäuse um die Motoren. Das wird dann schon passen. Den Schlitten und die Aufnahme für Stativ und Kamera mache ich selbst mit dem 3D Drucker und mit Hilfe von 10mm und 8mm Silberrundstahl. Das fährt dann auf insgesamt 8 Stk. Linearlagern. Natürlich (falls es wem interessiert) poste ich hier dann auch gerne alles nötige damit andere den auch bauen können. Ich drucke gerade die benötigten Teile für den Schlitten. Kugellager und Riemen sollten heute kommen. Das ganze soll so konzipiert sein das ich den Motorantrieb an mehrere Schlitten anbringen kann (wie bei Edelkrone im Video oben). So kann ich mit Schlitten in verschiedenen Größen machen und benötige nur eine Antriebseinheit. Deshalb kann ich auch nichts fertiges nehmen. Grüße Sascha
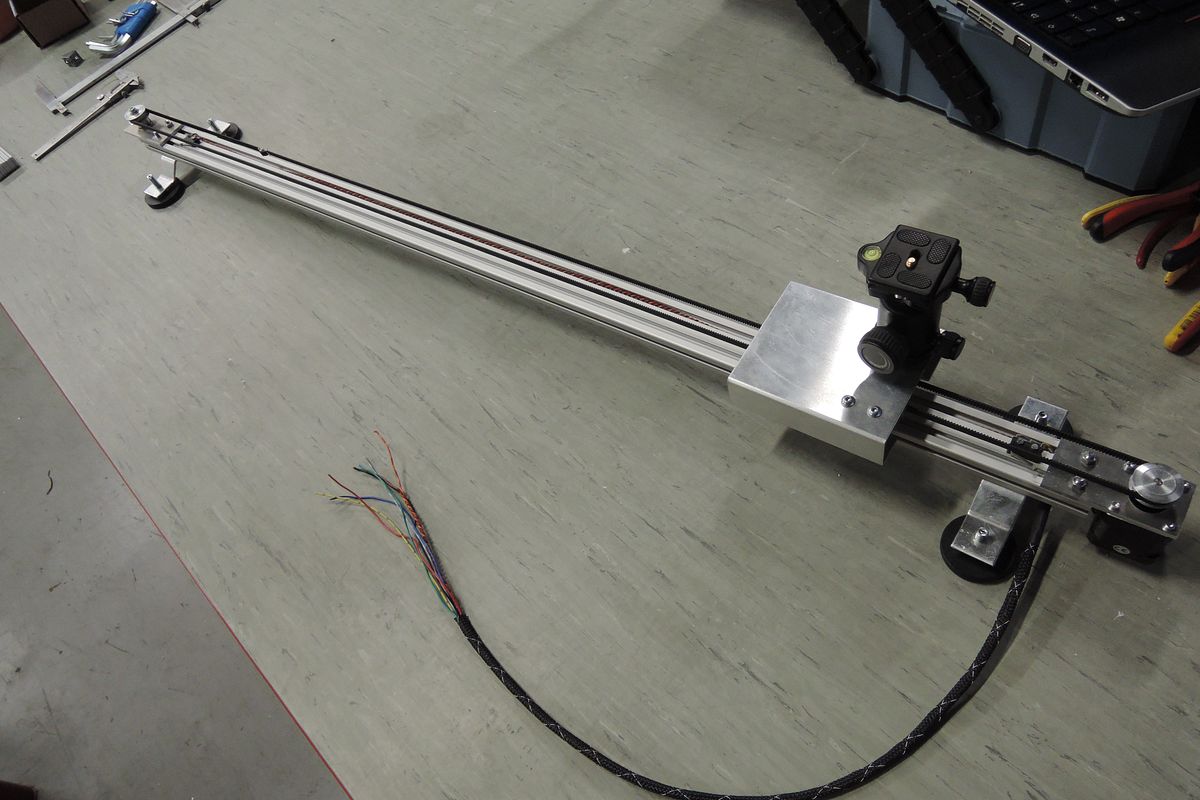
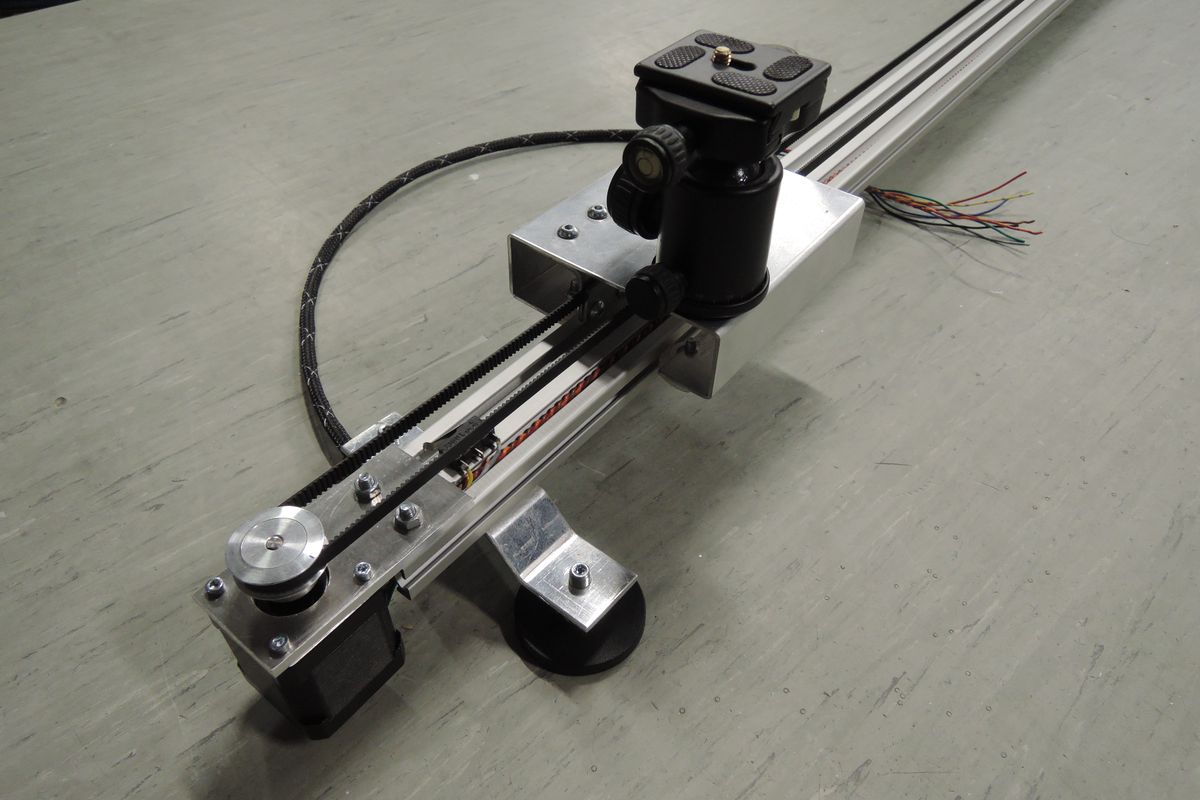
@TimeSlider Sehr cool!!!!! Sieht gut aus. Für dich warscheinlich eine Wochenendaufgabe oder?? Ich bestelle gerade bei eBay... Man, man. 8 Euro der Motor 12 Euro Versand :-( Was solls! Her damit. Ich brauch was gutes!! Grüße Sascha
Hallo Ne Österreich!! PS: Passt das mit dem Treiber und dem Treiberschutz von Watterott?? Grüße PS: Danke für die Hilfe!!
Ich möchte noch eines loswerden. Ich finde es TOP wie einem hier geholfen wird. Großes Lob an das Forum. Es ist immer eine Überwindung sich als Neuling im Elektronik-Bereich an solche Dinge zu wagen. Aber hier wird einem so toll geholfen das einem die Angst fast genommen wird. Ich bin gerade voller Energie. Falls ich das Projekt schaffe und mit eurer tollen Hilfe klappt das bestimmt, dann werde ich hier alles Online stellen und auch gerne mit den Teilen aus dem 3D Drucker aushelfen wenn nötig. @TimeSlider Ich hoffe ich darf mich wieder an dich wenden falls fragen zur Ansteuerung auftreten. Wie steuerst du den Slider?? Grüße Sascha
Sascha P. schrieb: > Was haltet Ihr von diesem Schrittmotor?? Sehe ich das richtig das ja im > Grunde alles oben ist was ich brauche? Treiber ist ja bereits hinten > drauf. Den würde ich an Deiner Stelle probieren, ohne daß ich jetzt die komplette Beschreibung auch zwischen den Zeilen gelesen hätte. Da selbst die Optokoppler an den Eingängen intern schon vorhanden sind, mußt Du elektronisch nicht 'herumfummeln' und kannst Dich sofort auf die Anwendungs-Programmierung konzentrieren. Kleiner Tipp dazu: Betreibe den Motor möglichst mit 24 V.
m.n. schrieb: > Sascha P. schrieb: >> Was haltet Ihr von diesem Schrittmotor?? Sehe ich das richtig das ja im >> Grunde alles oben ist was ich brauche? Treiber ist ja bereits hinten >> drauf. > > Den würde ich an Deiner Stelle probieren, ohne daß ich jetzt die > komplette Beschreibung auch zwischen den Zeilen gelesen hätte. > Da selbst die Optokoppler an den Eingängen intern schon vorhanden sind, > mußt Du elektronisch nicht 'herumfummeln' und kannst Dich sofort auf die > Anwendungs-Programmierung konzentrieren. > > Kleiner Tipp dazu: Betreibe den Motor möglichst mit 24 V. Hallo m.n. Danke für deine Antwort. Ich habe nun wie von timeSlider empfohlen bestellt. Das ansteuern des Treibers schaut jetzt auch nicht allzu kompliziert aus. Mal sehen was ich da hin bekomme. Aber nochmals danke für deinen Tipp. Grüße Sascha
Hallo "timeSlider" > Thorsten O. schrieb: >> (die sind i.A. >> durchaus brauchbar) > > durchaus brauchbar = gerade so ertragbar? - wenn man keinen Bock auf > Performance hat, sind die wirklich brauchbar ... You get what you pay for. Für kleine Ströme sind die Chips nicht schlecht, wenn man mehr Strom braucht muss man natürlich andere Treiber nehmen. Trotzdem liefern die Chips was die Datenblätter der Hersteller versprechen, wenn das Layout und die Schaltung vernünftig umgesetzt sind. Das ist bei vielen Shields leider nicht der Fall. Mit freundlichen Grüßen Thorsten Ostermann
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.