Hallo und guten Morgen liebes Forum.
Ich habe hier einen BMA020 und dieser gibt mir einen m.E. unplausiblen
z-Wert heraus, die Werte für x und y scheinen zu stimmen.
Hier mein Code zum Auslesen:
Der Sensor liegt etwas schräg und misst die 9,81 m/s² Erdbeschleunigung.
Falls er flach auf dem Tisch liegt, sollte man sich IMO eher die X und Y
Werte mal ansehen. Schau Dir auch mal die Rohwerte an, einfache Float
Anzeigen haben gerne mal Bugs.
Jim M. schrieb:> Der Sensor liegt etwas schräg und misst die 9,81 m/s²> Erdbeschleunigung.>> Falls er flach auf dem Tisch liegt, sollte man sich IMO eher die X und Y> Werte mal ansehen. Schau Dir auch mal die Rohwerte an, einfache Float> Anzeigen haben gerne mal Bugs.
Der Sensor liegt flach auf den Tisch bzw ist verbaut auf meiner Platine.
Hebe und senke ich den Sensor also in z-Richtung ändern sich die Werte,
jedoch nicht in x und y-Richtung.
Ja, ist doch alles richtig so.
Die Erdanziehung bewirkt eine permanente Beschleunigung nach unten,
deswegen fallen alle Sachen nach unten, wenn man sie loslässt.
Stefan U. schrieb:> Ja, ist doch alles richtig so.> Die Erdanziehung bewirkt eine permanente Beschleunigung nach unten,> deswegen fallen alle Sachen nach unten, wenn man sie loslässt.
Das ist richtig, aber wenn ich z.B. die Beschleunigung in x bzw in y-
Richtung bestimmen will, ist das ja ein Vektor g=[x,y,z]. Die Länge des
Vektors (Wurzel aus der Summe der Quadratwerten) gibt ja meine
Gesamteschleunigung an. Wenn ich dies integrieren möchte (im diesen
Falle numerisch) kommt nur Unsinn raus, klar, weil der Sensor zum
Erdmittelpunkt hin beschleunigt wird.
Ich wurde stuzig, als ich dies hier gelesen habe:
http://meineweltinmeinemkopf.blogspot.de/2012/06/beschleunigungssensor-auslesen-mit_3.html
Der Verfasser hat für z ganz andere Werte ermittelt.
Eigentlich interessiere ich mich nur im Endeffekt für die
Geschwindigkeiten in x- und y- Richtung, welche ich mir aus den
gelieferten Werten berechnen wollte.
Daniel V. schrieb:> Ich habe hier einen BMA020 und dieser gibt mir einen m.E. unplausiblen> z-Wert heraus
Was ist daran unplausibel?
Daniel V. schrieb:> Wenn ich dies integrieren möchte (im diesen> Falle numerisch) kommt nur Unsinn raus, klar, weil der Sensor zum> Erdmittelpunkt hin beschleunigt wird.
Wenn du (blind) integrieren willst, musst du natürlich alle auf den
Gegenstand wirkenden Kräfte berücksichtigen, nicht nur das, was der
Beschleunigungssensor erfasst. Der Tisch, auf dem er liegt, kompensiert
die Beschleunigungskräft in Richtung der Schwerebeschleunigung. Die
musst du für die Berechnung der Bewegung schon abziehen. Lass deinen
Sensor doch mal einen freien Fall machen, nachdem du den Offset
abgeglichen hast.
> kommt nur Unsinn raus
Du möchtest vermutlich die Erdanziehung heraus rechnen. Das ist ganz
einfach: Beim Programmstart soll das Gerät auf einer ebene Fläche
stehen. Dabei leist du die Werte der drei Achsen aus und speicherst sie
als Offset ab (die haben sowieso alle einen Offset - auch ohne
Beschleunigung).
Danach darf das Gerät bewegt/beschleunigt werden. Nun ziehst du immer
die drei Offset Werte von den aktuellen Messwerten ab und machst damit
deine weitere Berechnung. Dann kommt genau das heraus, was du erwartest.
Schau mal in die Bedienungsanleitung von fliegenden Spielzeugen. Die
machen das nämlich alle genau so.
> Lass deinen Sensor doch mal einen freien Fall machen
Genau, nur dann liefern alle drei Achsen den Wert 0 (wenn sie ideal
wären und keinen Offset hätten.
Stefan U. schrieb:> Du möchtest vermutlich die Erdanziehung heraus rechnen. Das ist ganz> einfach: Beim Programmstart soll das Gerät auf einer ebene Fläche> stehen. Dabei leist du die Werte der drei Achsen aus und speicherst sie> als Offset ab (die haben sowieso alle einen Offset - auch ohne> Beschleunigung).>> Danach darf das Gerät bewegt/beschleunigt werden. Nun ziehst du immer> die drei Offset Werte von den aktuellen Messwerten ab und machst damit> deine weitere Berechnung. Dann kommt genau das heraus, was du erwartest.
Ahhh, jetzt wird mir das klar, das heißt, ich lese die ersten Werte in
einer Offset-Variable und ziehe diese voneinander ab. Mache ich das
sinnvollerweise im µC oder später im Matlab-Programm, Ich wüsste jetzt
gerade nicht, wie ich das gerade umsetzen soll :(
Daniel V. schrieb:> Mache ich das> sinnvollerweise im µC oder später im Matlab-Programm, Ich wüsste jetzt> gerade nicht, wie ich das gerade umsetzen soll :(
Macht dir die Subtraktion Sorgen oder was weisst du gerade nicht?
Wolfgang schrieb:> Daniel V. schrieb:>> Mache ich das>> sinnvollerweise im µC oder später im Matlab-Programm, Ich wüsste jetzt>> gerade nicht, wie ich das gerade umsetzen soll :(>> Macht dir die Subtraktion Sorgen oder was weisst du gerade nicht?
Alles gut.
In der Main lese ich diese Werte erstmalig und ziehe diese dann in der
while-Schleife voneinander ab ;)
Daniel V. schrieb:> In der Main lese ich diese Werte erstmalig und ziehe diese dann in der> while-Schleife voneinander ab ;)
Ich würde sie eher bei Kalibierung des Modules messen und im EEPROM
ablegen. Sonst hat man jedes Mal beim Starten die ganze Prozedur.
Neben der Schwerkraft muss Der Offset der Achsen doch auch noch bestimmt
werden. Sonst misst du plötzlich scheinbar lineare Beschleunigungen,
obwohl du nur deinen Sensor im Raum gedreht hast. Oder hattest du vor,
nur mit dem Skalar der Beschleunigung, unabhängig von der Richtung, zu
arbeiten?
Wolfgang schrieb:> Daniel V. schrieb:>> In der Main lese ich diese Werte erstmalig und ziehe diese dann in der>> while-Schleife voneinander ab ;)>> Ich würde sie eher bei Kalibierung des Modules messen und im EEPROM> ablegen. Sonst hat man jedes Mal beim Starten die ganze Prozedur.>> Neben der Schwerkraft muss Der Offset der Achsen doch auch noch bestimmt> werden. Sonst misst du plötzlich scheinbar lineare Beschleunigungen,> obwohl du nur deinen Sensor im Raum gedreht hast. Oder hattest du vor,> nur mit dem Skalar der Beschleunigung, unabhängig von der Richtung, zu> arbeiten?
Ein klassisches EEPROM hat mein STM32 nicht ;). Ich möchte letztendlich
nur die Geschwindigkeiten in x- und y-Richtung durch numerische
Integration bestimmen.
Danke euch ;)
> Ich möchte letztendlic nur die Geschwindigkeiten bestimmen.
Sorry, dass ich dich bremse. Aber der Sensor kann nur Beschleunigung
messen, nicht Geschwindigkeit. Wenn Du ihn vom nächsten Funkturm fallen
lässt, wird er während des freien Falls fast gar keine Beschleunigung
erfassen ob er ziemlich schnell in Bewegung ist - bis zum Aufprall.
Stefan U. schrieb:> Sorry, dass ich dich bremse. Aber der Sensor kann nur Beschleunigung> messen, nicht Geschwindigkeit.
Daher die numerische Integration der Beschleunigungswerte über die Zeit
;)
Thomas V. schrieb:> Darüber reden wir dann nochmal im Detail wen Du wieder im Labor bist ;-)> Schöne Ostertage bis dahin
Chef liest mit xD. Dir auch frohe Ostern und schönen Urlaub auf
Teneriffa ;)
>> Sorry, dass ich dich bremse. Aber der Sensor kann nur Beschleunigung>> messen, nicht Geschwindigkeit.> Daher die numerische Integration der Beschleunigungswerte über die Zeit
Glaube mir, das geht nicht. Nichtmal Ansatzweise. Ich hatte mal einen
Hersteller von solchen Sensoren nach einer brauchbaren Lösung gefragt.
Die erklärten mir damals, dass das eine völlig bekloppte Idee sei.
Nichtmal die sensibelsten Sensoren, die sie produzierten, seien dazu
geeignet.
Ich habe gerade einen Tippfehler entdeckt, der den Sinn des Satzes
kaputt macht:
> Wenn Du ihn vom nächsten Funkturm fallen> lässt, wird er während des freien Falls fast gar keine Beschleunigung> erfassen ob er ziemlich schnell in Bewegung ist - bis zum Aufprall.
Soll heissen: ... obwohl er ziemlich schnell in Bewegung ist ...
Daniel V. schrieb:> Stefan U. schrieb:>> Sorry, dass ich dich bremse. Aber der Sensor kann nur Beschleunigung>> messen, nicht Geschwindigkeit.>> Daher die numerische Integration der Beschleunigungswerte über die Zeit> ;)
Das wird nix, das driftet dir innerhalb von Sekunden weg. Die ganze
Sache ist leider ein schwieriges Problem :(
Stefan U. schrieb:> Glaube mir, das geht nicht. Nichtmal Ansatzweise. Ich hatte mal einen> Hersteller von solchen Sensoren nach einer brauchbaren Lösung gefragt.> Die erklärten mir damals, dass das eine völlig bekloppte Idee sei.> Nichtmal die sensibelsten Sensoren, die sie produzierten, seien dazu> geeignet.Sven B. schrieb:> Das wird nix, das driftet dir innerhalb von Sekunden weg. Die ganze> Sache ist leider ein schwieriges Problem :(
Dann in der Tat, das war ein Denkfehler. Mein Gedanke war, ich
integriere numerisch aber die Fehler werden ebenfalls mitsummiert (wie
Steven es schon gesagt hat).
Die Werte stimmen jetzt soweit, ich habe eine Funktion geschrieben,
welche mir beim Start die Offsetlage in ein Array speichern und die
folgenden Messwerte werden nun von diesen Offsetwerte abgezogen.
Danke für eure Hinweise :)
Gruß
Daniel
PS:
Beitrag "Geschwindigkeitsberechnung durch Accelerometer?"
Ich bin wohl nicht der erste mit den Gedanken gewesen ;)
Daniel V. schrieb:> Die Werte stimmen jetzt soweit, ich habe eine Funktion geschrieben,> welche mir beim Start die Offsetlage in ein Array speichern und die> folgenden Messwerte werden nun von diesen Offsetwerte abgezogen.
Für eine längere Integration kommst du damit nicht weit. Da brauchst du,
selbst wenn der Sensor nicht driftet, Nachkommastellen. Du musst also
zumindest deinen Offset als Mittelwert von vielen Messungen bestimmen
und bei der Integration auch mit erhöhter Genauigkeit rechnen, z.B.
indem du eine Fixkommapräsentation für die Rechnung verwendest.
Dazu kommt noch, dass der BMA020 eher ein grobes Schätzeisen ist. Damit
kannst du vielleicht die Startgeschwindigkeit eines Flugzeiges messen,
aber sicher nicht eine Kiste Tracken, die jemand zu Fuß von A nach B
trägt.
Daniel V. schrieb:> Hier mein Code zum Auslesen:>> float bma020_read_accel(float* acc)
...
> acc[2] = (float)acc_s[2] * 9.8f * tmp2 / 512.0f;>> //return sqrtf(acc[0] * acc[0] + acc[1] * acc[1] + acc[2] * acc[2]);> }>> Habe ich irgendwo einen Denkfehler? Auch ändern sich die Werte kaum,> außer in z-Richtung.>> Danke und Gruß> Daniel
Nö, das ist nur ein Ausschnitt ...
Hi,
ich stimme mal den Vorrednern zu was die genauigkeit angeht. Selbst wenn
du den Offset perfekt kalibrierst und du keine Sensordrift hast sorgt
schon allein die Auflösung für einen Fehler der innerhalb von Sekunden
Meter erreicht. (Einfach mal nachrrechnen)
Um überhaupt eine Chanche zu haben musst du sehr genau deine Lage im
Raum kennen. Den jeder Lagefehler führt aufgrund der Erdbeschleunigung
zu einem Geschwindigkeitsfehler. Schau mal nach Strap Down Rechnung und
Kalmanfilter. Aber wenn du nicht gerade sehr schnell beschleunigende
Objekte hast vergiss es.
Gruß
Peter
Ich hatte ja eine Funktion geschrieben, welche mir die Offsetwerte
zwischenspeichert. Diese habe ich anschließend von den normalen
Messwerten abgezogen. Aus irgendeinen Grund läuft es nicht mehr und ich
seh den Wald vor lauter Bäumen nicht:
Meine Quick&Dirtylösung in der Main:
1
inti,j;
2
uint8_t*p;
3
floataccel_v[3],accel,accel_c[3],accel_w;
4
5
for(j=1;j<1000;j++)
6
{
7
DEBUG_LED_ON;
8
accel_w=bma020_read_accel(accel_c);// Die Funktion im Eingangspost
> Aus irgendeinen Grund läuft es nicht mehr
Was genau läuft nicht mehr und was passiert stattdessen?
Das ist der Moment, wo ein Debugger serh hilfreich sein kann, oder ein
Simulator.
Oder wenigstens viel mehr Log-Meldungen von allen Variablen und
Zwischenschritten der Berechnung.
Was mir hier aber sofort auffällt: Du rechnest da mit float Datentypen
herum. Das ist unnötig aufwändig und bringt zudem höhere Rundungsfehler
mit sich, als simple Integer-Operationen hätten.
Speichere deine Messwerte und Offset Werte als Integer. Rechne als
Integer.
Und nur ganz zum Schluss, wenn du die Werte anzeigst, rechne sie auf
Float um.
Stefan U. schrieb:> Was genau läuft nicht mehr und was passiert stattdessen?> Das ist der Moment, wo ein Debugger sehr hilfreich sein kann, oder ein> Simulator.
Sehr gerne :-)
Die Bilder zeigt das Fehlerbild. Das kuriose war ja, es hat mal
funktioniert und irgendwie habe ich jetzt ein absolutes Bett vor dem
Kopf
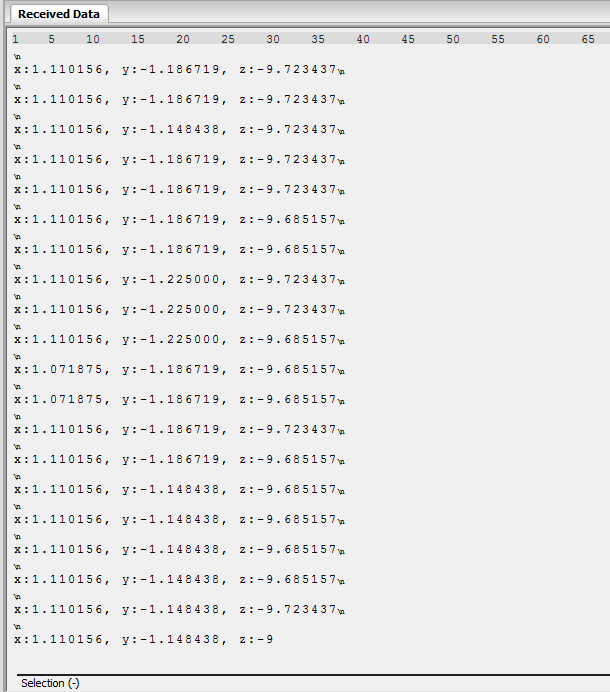
Ergebnis zeigt die aktuellen kalibrierten Messwerte. OK.
Mein Gedanke war, ich speichere die Werte beim Start (entweder warte
ich, bis der Sensor "eingeschwungen" ist oder den Mittelwert aus 1000
Einzelwerte) und speichere diese in ein Array. Diese ziehe ich von den
Messwerten ab.
Das Ergebnis ist die For-Schleife.
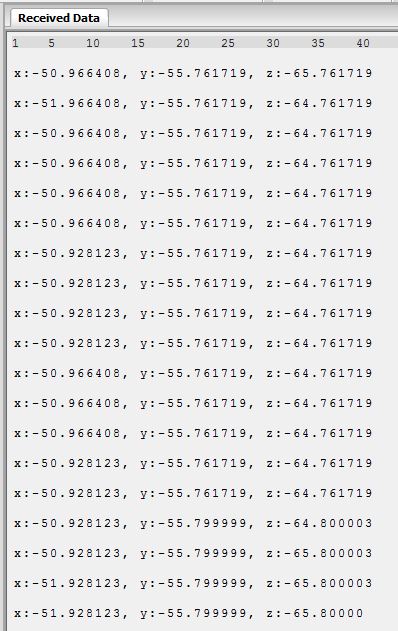
Ziehe ich diese Werte ab, so kommen unplausible Ergebnisse zustande. Das
zeigt das Bild Mit_dieser_Funktion.
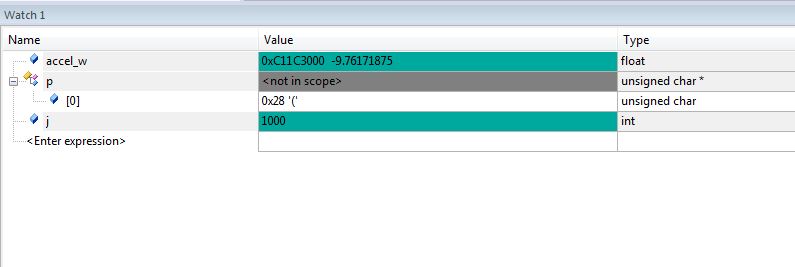
Die Debugmeldung ist im Bild Debug zu sehen.
Absolut seltsames Verhalten :(
Es ist mir ja peinlich, aber ich stehe zu meinen Fehlern. Ich habe ein
Flag auskommentiert und dann habe ich alle Kommentare zur besseren
Lesbarkeit zum hochladen auch noch gelöscht. Naja, was ne Stunde Schlaf
so ausmachen kann ;)
Gruß
Daniel
> Die Bilder zeigt das Fehlerbild.
Du hast vergessen, den Fehler zu kennzeichnen oder zu Beschreiben. Ich
habe ja keine Ahnung, welche der vielen Zahlen nicht deiner Erwartung
entsprechen.
In Zukunft vergiss bitte nicht, immer hin zu schreiben, was du erwartet
hast und was du stattdessen erhalten hast.
Daniel V. schrieb:> Ergebnis.PNG
Die Daten erinnern mich an die wundersame Brotvermehrung. Der Sensor hat
eine Auflösung von 10 Bit, also 3 gültige Stellen und du generiest
daraus Zahlen mit 7 Stellen.
Das ist viel unnötiger Lesestoff - eildiweil Hausnummer.