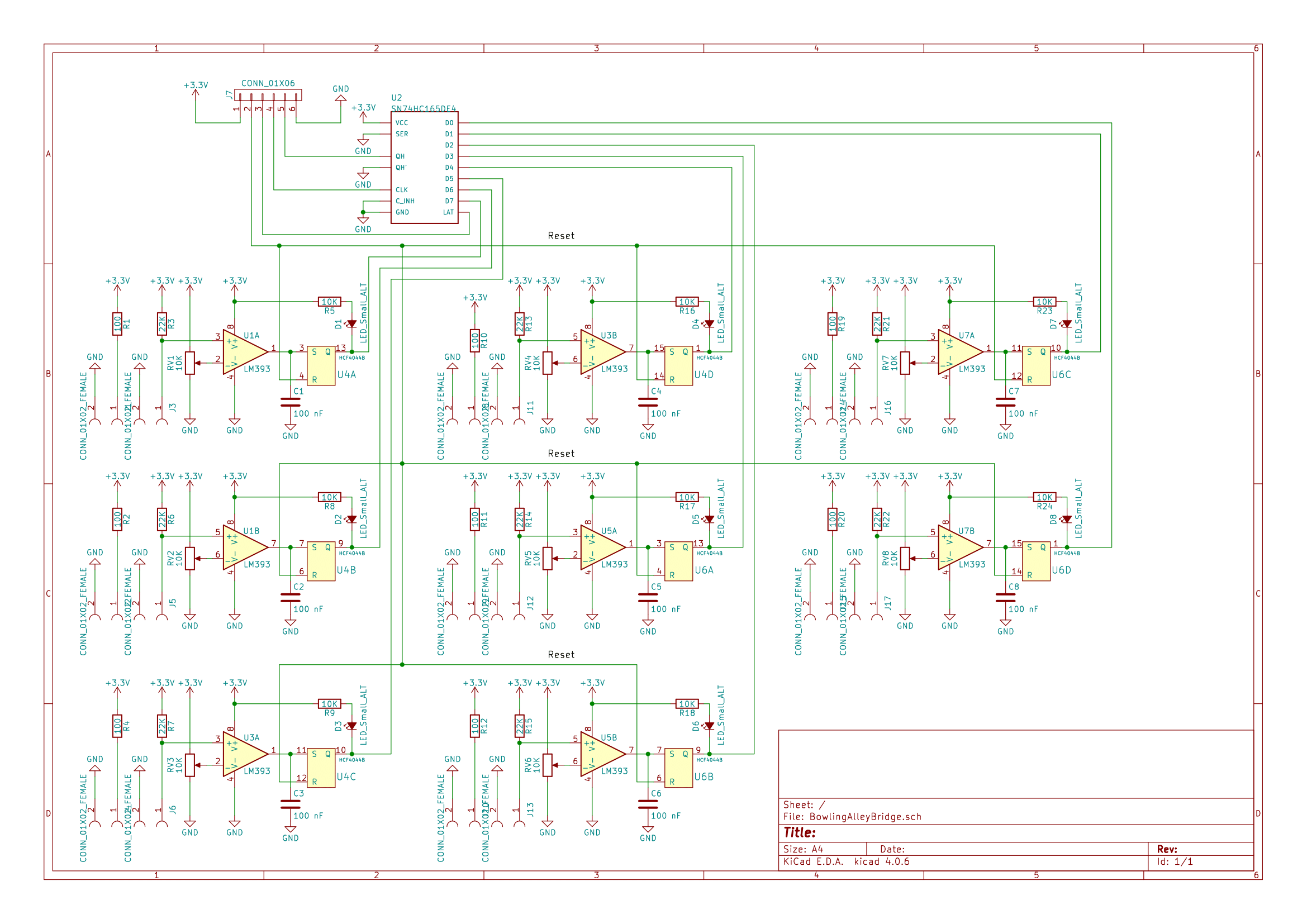
Ich möchte gerne als Trainingsgerät für die Bowlingbahn einen "Linescanner" bauen. Basis dachte ich mir, soll eine Arduino mit 39 IR-Modulen sein. Für den Hintergrund: die 1,04 m breite Bowlingbahn ist in 39 Lines aufgeteilt. Für das Training ist es mir wichtig, auf welcher Line der Ball gelaufen ist. Dafür möchte ich über jede Line eine IR LED/Transmitter Kombi setzen. Entsprechende Schaltungen mit dem LM393 habe ich zu haufe gefunden und habe mich an dennen bedient. Ich habe mir gedacht, das Signal mit einem RS-FlipFlop zu halten, bis alle Sensoren verarbeitet wurden. Dafür habe ich einen 4044 genutzt. Um nicht 39 IO-Kanäle zu nutzen, will ich für jeweils 8 Lines ein Schieberegister dazwischen setzen. Dabei ist diese Schaltung raus gekommen. Da das mein erster Schaltplan ist, bin ich sehr unsicher. Habe mich zwar viel belesen, aber das ist auch schon alles. Bevor ich jetzt meine erste Leiterplatte Layoute und die in Auftrag gebe, würde ich es nett finden, wenn hier mal einer drüber guckt.
Angehängte Dateien:
-

8LineSensor-1.png
140 KB
In solchen Modulen ist die Auswerte-Elektronik schon drin: http://www.ebay.de/itm/5X-IR-Infrarot-Hindernis-vermeidung-Sensor-Modul-Barrier-Smart-Car-Arduino-TE174/381304852981?_trksid=p2047675.c100005.m1851&_trkparms=aid%3D555018%26algo%3DPL.SIM%26ao%3D2%26asc%3D20140117130753%26meid%3Df0a6e2688b35416cb1e5804a46b9f65c%26pid%3D100005%26rk%3D1%26rkt%3D6%26mehot%3Dag%26sd%3D121854022580 http://www.ebay.de/itm/401110634009 Dann verbleibt die Aufgabe, die 39 Digitalsignale zusammenzuführen.
Danke für Deine Antwort. Genau damit habe ich meine ersten Versuche aufm Steckboard gemacht. Hatte dann das Problem, das ich nicht immer mitbekommen habe, wann ein Ball durch ist und wollte meine Signal mit dem FlipFlop stabil machen. Dachte, wenn eh schon ne Leiterplatte mit den FlipFlops und den Schieberegistern mache, kann ich dieses Modul auch mit drauf bringen.
Ich würde heute sowas mit einer Kamera und dann per Software machen. Der Vorteil einer Softwarelösung ist, dass man diese "schmerzfrei" nachrüsten bzw. optimieren kann. Soo wahnsinnig schnell ist ein Bowlingball nicht, dass man dazu einen Superrechner benötigen würde. Und ich denke, dass ja zur Dokumentation der Ergebnisse vlt. ohnehin ein PC/Laptop vor Ort ist, oder?
Jens S. schrieb: > Hatte dann das Problem, das ich nicht immer > mitbekommen habe, wann ein Ball durch ist und wollte meine Signal mit > dem FlipFlop stabil machen. Keine Ahnung wie schnell so eine Kugel ist. Die Sensoren könnten z.B alle 10 ms abgefragt werden, dann kann man auch auf das Flip-Flop verzichten.
Jens S. schrieb: > (...) Bevor ich jetzt meine erste Leiterplatte Layoute und > die in Auftrag gebe, würde ich es nett finden, wenn hier mal einer > drüber guckt. Vorsicht: Der 393 hat Open-Collector-Ausgänge, also gehört ein Pullup dahinter, wenn Du damit Logikpegel erzeugen willst. Grüßle, Volker.
Frank E. schrieb: > Ich würde heute sowas mit einer Kamera und dann per Software machen. Prof. System arbeiten so, richtig und verwenden hochauflösende Highspeedkamerasysteme - unbezahlbar bei 6 Trainingsbahnen. Mit einer Aktionkamara versucht, das statisch von einem Punkt aus zu machen, hilft bei der Bewegungsanalyse, aber nicht für den Balllauf. Dafür führen die CAT- Systeme die Ball-Kamera in Echtzeit nach. Ich möchte auf jeder Bahn 2 Brücken mit den Sensoren haben. Eine in Höhe der Pfeile (ca. 4m), zweite am Breakpunkt, der ist abhängig von der Öllänge. Ich trainiere Jugendliche. Wenn ich denen mit einem Video komme, da haben Sie grundsätzlich Interpretationsbedarf. Wenn aber über solch einer Bücke eine Zahl aufleuchtet ist das eindeutig. Die Schaltung setzt sich ja zusammen aus 8 Sensormodulen, da bin ich mir recht sicher, das ich das korrekt von den Beispielen übernommen habe. Den S-Eingang des FlipFlop habe ich direkt an den Ausgang des OPs gebracht, sollte da noch mal n Widerstand gegen Plus zwischengeschaltet werden? Alle R-Ausgänge der FlipFlops zusammengeschaltet. Solle ich die durch Dioden voreinander schützen? Aber ich ziehe ja den Pegel für alle gemeinsam runter. Zwischen FlipFlop und Schieberegister auch nichts weiter. Kann man das so machen? Edit: Ein Pullup mit 10K an jedem Ausgang des 393 hinzugefügt.
Jens S. schrieb: > Dabei ist diese Schaltung raus gekommen. Da das mein erster Schaltplan > ist, bin ich sehr unsicher. Habe mich zwar viel belesen, aber das ist > auch schon alles. Bevor ich jetzt meine erste Leiterplatte Layoute und > die in Auftrag gebe, würde ich es nett finden, wenn hier mal einer > drüber guckt. Drei Punkte: 1. Der LM393 hat open-collector Ausgänge. Da muß noch jeweils ein Pullup nach +3.3V ran, damit da auch mal ein H-Pegel rauskommt. 2. 100nF am Ausgang des Komparators erscheinen mir zu groß. Das Flipflop ist zwar langsame 4000er Technik, aber beliebig langsam dürfen auch da die Flanken nicht sein. Wenn du Störsignale unterdrücken willst, setz den Kondensator an den Eingang des Komparators. 3. Hysterese. So wie jetzt, hat der Komparator keine. Das äußert sich dann darin, daß die Schaltung am Kipp-Punkt sehr empfindlich auf Störungen (Rauschen, Brummen, eingefangene HF) reagiert. Mit einem hochohmigen (ca. 1M) Widerstand vom Ausgang des Komparators zum (+) Eingang kriegt er eine Hysterese. Heißt: es gibt jetzt zwei Schaltpunkte und Störungen werden gut unterdrückt. Noch ein paar Hinweise/Ideen: den LM393 gibt es auch als 4-fach Ausführung LM339. Noch einfacher würde die Schaltung, wenn du CMOS-Gatter mit Schmitt-Trigger Eingängen statt der Komparatoren verwenden würdest. Z.B. 4093 oder 40106:
1 | +3.3V |
2 | | 1/4 |
3 | R1 4093 |
4 | | .---. |
5 | .--o--*---| *-- zum 4044 |
6 | | | `---´ |
7 | Foto- |< === |
8 | transistor | C1 | |
9 | GND GND |
Für R1 ein Trimmpoti 47K in Reihe mit einem 10K Festwiderstand. Werte hängen natürlich von der Empfindlichkeit deiner Lichtschranken ab. C1 mit 10..100nF.
Jens S. schrieb: > die 1,04 m breite Bowlingbahn ist in 39 Lines > aufgeteilt Folglich ist eine Line weniger als 3 cm breit, und eine durchlaufender Ball löst mehr als 5 Signale aus. Die Mitte ist da wo das Signal am längsten ist. Es gäbe auch ganz andere Möglichkeiten, z.B. Ultraschall-Abstandssensoren an beiden Seiten, das ergäbe viel weniger Schaltung. Georg
Angehängte Dateien:
-

8IRSonsors.png
150 KB
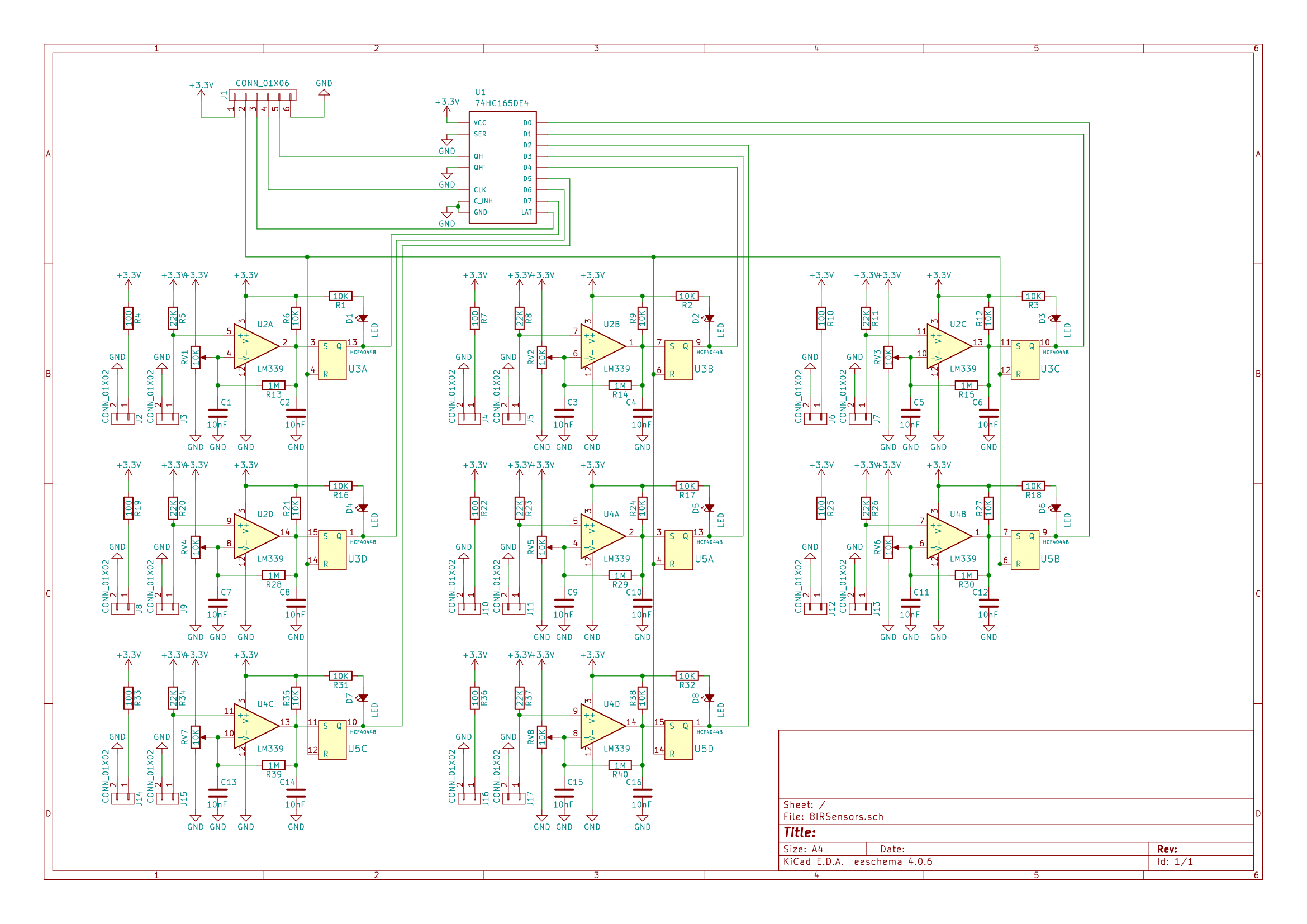
Georg schrieb > Es gäbe auch ganz andere Möglichkeiten, z.B. > Ultraschall-Abstandssensoren an beiden Seiten, das ergäbe viel weniger > Schaltung. Das war der Ansatz von einem anderen Trainer und er sagte, die beiden Sensoren haben sich gegenseitig gestört. Ansonsten hast du Recht, der Ball löst mehrere Sensoren aus. Da auch, dank der FlipFlops, ein ganz kurzer Impuls am Rand bemerkt wird, kann einfach der Mittelwert genommen werden. Danke Volker, danke Axel. Ich habe eure Anmerkungen übernommen und da ist jetzt das raus gekommen.
Jens S. schrieb: > > Danke Volker, danke Axel. Ich habe eure Anmerkungen übernommen und da > ist jetzt das raus gekommen. Tja. Nur leider ... falsch. Die Mitkopplung für die Hysterese muß zum (+) Eingang des Komparators gehen, nicht zum (-) Eingang. Siehe den Artikel Schmitt-Trigger. Und wenn du Störungen vom Sensor (bzw. der Leitung zu diesem) unterdrücken willst, dann gehört der Kondensator natürlich an den Sensor-Anschluß. Vulgo: ebenfalls an den (+) Eingang des Komparators. Am Ausgang des Komparators bringt ein Kondensator wenig bis nichts. Ich bin mir auch nicht sicher, ob die Polarität der Signale stimmt. Der 4044 kippt, wenn der S-Eingang auf L geht. Da der Komparator nicht invertiert, muß dazu der Sensor-Eingang auf L gehen. Wenn das wie vermutet, ein Fototransistor ist, dann passiert das, wenn der beleuchtet wird. Wenn deine Lichtschranken allerdings von der Kugel unterbrochen werden, dann ist die Polarität gerade falsch herum ... Damit wird auch klar, warum der Kondensator am Ausgang des Komparators nichts bringt. Der open-collector Ausgang kann den Kondensator recht schnell entladen. Wirksam verzögert wird nur die L->H Flanke. Genau die interessiert das Flipflop aber so gar nicht. Wenn es gekippt ist, dann ist es gekippt.
Axel S. schrieb: >> >> Danke Volker, danke Axel. Ich habe eure Anmerkungen übernommen und da >> ist jetzt das raus gekommen. > > Tja. Nur leider ... falsch. Tja, da merkt man doch, sind meine ersten Gehversuche auf diesem Gebiet. Bis vor 10 Jahren in der emb. Programmierung gewesen, da habe ich aber fertige Leiterplatten bekommen, die zum Leben erweckt werden sollten. Werde die ganze Schaltung noch mal überarbeiten. In dem Zusammenhang auch den L339 rausschmeißen und durch einen 4093 ersetzen. Danach wieder hier rein stellen und hoffen, das ich euch damit nicht nerve.
Jens S. schrieb: > Das war der Ansatz von einem anderen Trainer und er sagte, die beiden > Sensoren haben sich gegenseitig gestört Wenn man die fertig kauft und zwei gleiche nimmt, ist das kein Wunder. Für einen Fachmann wäre es aber kein Problem, die Sensoren mit unterschiedlichen Frequenzen arbeiten zu lassen. Aber für dich wäre das nicht realisierbar und du hast dich ja auch schon längst festgelegt. Jens S. schrieb: > kann einfach der Mittelwert genommen > werden. Ja, aber so die richtige Line sicher zu bestimmen dürfte ausgeschlossen sein, besser als +- 1..2 Lines wird das nicht. Beispiel: links wird gerade noch ein Impuls erkannt, rechts gerade nicht, bei minimalem Unterschied. Das verschiebt natürlich die berechnete Line nach links. Bei Abstandssensoren gäbe es keine prinzipielle Beschränkung der Genauigkeit. Georg
Georg schrieb: > Wenn man die fertig kauft und zwei gleiche nimmt, ist das kein Wunder. > Für einen Fachmann wäre es aber kein Problem, die Sensoren mit > unterschiedlichen Frequenzen arbeiten zu lassen. Aber für dich wäre das > nicht realisierbar und du hast dich ja auch schon längst festgelegt. Bin noch nicht festgelegt und würde mich über einen Fachmann an meiner Seite freuen.
Jens S. schrieb: > würde mich über einen Fachmann an meiner > Seite freuen. Naja, ich denke mal drüber nach - ich habe seit 50 Jahren eine Elektronik-Entwicklungsfirma und spiele seit 30 Jahren Bowling, das sind brauchbare Voraussetzungen. Erste Gedanken: die gegenseitige Störung sollte kein Problem sein, weil sie nur auftritt wenn nicht gespielt wird, läuft ein Ball durch, schirmt er die beiden Sensoren voneinander ab. Eine gültige Messung ergibt sich, wenn die Summe der beiden Abstände gleich Bahnbreite minus Balldurchmesser ist. Das Problem ist die Geschwindigkeit der Messung, um auch noch sicher zu messen wenn jemand mit 50 km/h wirft. Ev. könnte man die US-Messung erst durch eine Lichtschranke auslösen. Wie gesagt ich denke mal so vor mich hin. Praktische Frage: wo bist du zuhause? Meine Heimatbahn ist Tübingen. Georg
Georg schrieb: > Jens S. schrieb: >> würde mich über einen Fachmann an meiner >> Seite freuen. > > Naja, ich denke mal drüber nach - ich habe seit 50 Jahren eine > Elektronik-Entwicklungsfirma und spiele seit 30 Jahren Bowling, das sind > brauchbare Voraussetzungen. > > Wie gesagt ich denke mal so vor mich hin. Praktische Frage: wo bist du > zuhause? Meine Heimatbahn ist Tübingen. Technisch gesehen, beste Voraussetungen. Wir würden uns nur nicht allzuoft sehen. Ist schon ein bis'el Strecke von Berlin nach Tübingen. Sollte aber von meiner Seite her kein KO-Kriterium sein. Melde dich mal bitte im Forum an, dann kannst du mir eine PM schicken und wir müssen nicht dieses Forum vollspamen. Jens
Jens S. schrieb: > Melde dich mal bitte im Forum an, dann kannst du mir eine PM schicken > und wir müssen nicht dieses Forum vollspamen. Ja, hab ich. Georg
Dann neben meinem Namen den Link anklicken, dann kannst du eine persönliche Mitteilung nur an mich senden.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.