Hallo Forum, ich habe zwei baugleiche GPS-Empfänger gekauft und lese sie via serielle Schnittstellen aus. Beide GPS-Empänger senden ihre Daten im Abstand von einer Sekunde. Die GPS Empfänger liegen dicht beeinander (ca. 20 cm Abstand). beide haben ca. 10 bis 12 Satelliten auf Empfang. Nehme ich die Koordinaten beider Empfänger und vergleiche sie, so ergibt sich ein Fehler von 0 bis 10m sowohl in der Breite als auch in der Länge. Der Fehler springt nicht statistisch, sondern wächst über Sekunden langsam an und fällt wieder ab. Eigentlich habe ich erwartet, das unter gleichen Bedingungen beide Geräte die gleichen Koordinaten liefern müßten, mal von der Phasenlage (+/-20cm) abgesehen. Meine erste Interpretation war: was ist, wenn die Koordinaten des ersten Empfänger schon eine Sekunde älter sind, als die des anderen? Tatsächlich können sich die GPS Koordinaten eines feststehenden Gerätes auch ändern, aber auch nur langsam. Dass zwei Geräte einen differenziellen Fehler von 10 m innerhalb einer Sekunden haben können, erklärt sich mir nicht. Habt Ihr eine Idee, wieso zwei gleiche GPS Empänger unter guten Empfangsbedingungen, nebeneinander liegend so große Meßunterschiede haben können? GPS Bastler PS Ja, durch Störung in der Ionosphäre, Temperatur usw. entstehen Fehler, die sich aber auf beide Empfänger gleichartig auswirken sollten und deshalb nicht wirksam werden können.
GPS Bastler schrieb: > Eigentlich habe ich erwartet, das unter gleichen Bedingungen beide > Geräte die gleichen Koordinaten liefern müßten, mal von der Phasenlage > (+/-20cm) abgesehen. ??? GPS hat keine Genauigkeit von 0,2 m . > Dass zwei Geräte einen > differenziellen Fehler von 10 m innerhalb einer Sekunden haben können, > erklärt sich mir nicht. GPS-Genaugkeit liegt bei 5 bis 20m, beide Geräte liegen innerhalb des Fehlerintervalls.
C. A. Rotwang schrieb: > ??? GPS hat keine Genauigkeit von 0,2 m . Doch, und sogar noch besser, aber nicht mit dem 10€ Empfänger von eBay.
TO: Bevor jetzt alle Leser meinen, > GPS-Genaugkeit liegt bei 5 bis 20m, beide Geräte liegen innerhalb des > Fehlerintervalls. damit wäre jetzt alles gesagt, es geht um https://de.wikipedia.org/wiki/Differential_Global_Positioning_System Differentielles GPS. Der erste Schritt dazu ist (meiner Meinung nach), zwei GPS Empfänger zu vergleichen. Der zweite Schritt ist es, den einen stationären GPS Empfänger den Fehler messen zu lassen und dem anderen mobilen Empfänger diese Info zukommen zu lassen, damit er seine Positionsdaten entsprechend korrigiert. Leider haperts schon in Schritt 1. :-(
Couka R. schrieb: > C. A. Rotwang schrieb: >> ??? GPS hat keine Genauigkeit von 0,2 m . > > Doch, und sogar noch besser, aber nicht mit dem 10€ Empfänger von eBay. Quatsch, wo gekauft ist unwichtig, Genauer wird GPS durch assestierte Korrektur und die benötigt eine Internetverbindung o.ä. für Korrekturdaten. Und davon schreibt der TO nix.
Couka R. schrieb: > C. A. Rotwang schrieb: >> ??? GPS hat keine Genauigkeit von 0,2 m . > > Doch, und sogar noch besser, aber nicht mit dem 10€ Empfänger von eBay. Die Genauigkeit eines GPS ist keine Frage des Preises. Auch mit einem 1000 Euro Empfänger ist die Genauigkeite keine 0,2m. Höchstens mit dem Korrektursignal eines Differential GPS (DGPS) kommt man dahin. Selbt das dem Militär vorbehaltene und verschlüsselt ausgestrahlte Precise Positioning Service (PPS) gibt eine Genauigkeit von 5,9 m (in 95 % der Messungen) an.
Hallo, spontan hätte ich auf die Taktquelle der GPS Empfänger getippt. Für sehr präzise GPS Daten sind ja nicht nur die Atomuhren in den Satelliten wichtig, sondern auch eine stabile Taktquelle im Empfänger. Laufen die Taktgeber in den GPS Empfängern mit leicht unterschiedlichen Frequenzen weicht folglich auch die Messergebnisse voneinander ab, aber eben nur solange, bis das Modul die Taktquelle mit dem GPS Signal wieder nachjustiert. Gruß Kai
GPS Bastler schrieb: >> GPS-Genaugkeit liegt bei 5 bis 20m, beide Geräte liegen innerhalb des >> Fehlerintervalls. > > damit wäre jetzt alles gesagt, es geht um > > https://de.wikipedia.org/wiki/Differential_Global_Positioning_System > > Differentielles GPS. > Der erste Schritt dazu ist (meiner Meinung nach), zwei GPS Empfänger zu > vergleichen. Nee, der erste Schritt ist den GPS-Empfänger an einen referenzpunkt " ... sogenannte Referenzstationen, benutzt, deren exakte Lage durch klassische Vermessungsmethoden bestimmt wurde" zu bringen. Dann bestimm mal die Position des einen Empfängers mit klassischen Methoden genau... Und dann sollte es mich nicht wundern das Exemplartoleranzen an der Antennenanbindung für Fehler in der bestimmung der Laufzeittoleranz sorgen. Tausch doch mal die PÜosition der Empfänger aus - kehrt sich das Verhältniss um oder bleibt es gleich?
Couka R. schrieb: > C. A. Rotwang schrieb: >> ??? GPS hat keine Genauigkeit von 0,2 m . > > Doch, und sogar noch besser, aber nicht mit dem 10€ Empfänger von eBay. NEIN! Hier die Erklärung dafür: Eigentlich kommt man mit keinem handelsüblichen Empfänger auf die Genauigkeit von "besser als 0,2m". Auch mit einem 100€-Gerät geht das nicht! Da mußt du MINDESTENS noch eine Null ranhängen. Und selbst damit allein geht es nicht. Die einzige Möglichkeit, die Genauigkeit zu verbessern, ist eine teure kostenpflichtige SAPOS-Freischaltung. Dafür muß aber auch der Empfänger geeignet sein. Zusätzlich zum GPS wird noch ein Korrektursignal benötigt. Nur mit GPS allein geht das definitiv NICHT!
C. A. Rotwang schrieb: > Quatsch, wo gekauft ist unwichtig, Genauer wird GPS durch assestierte > Korrektur und die benötigt eine Internetverbindung o.ä. für > Korrekturdaten. Und davon schreibt der TO nix. danke C.A. Rotwang. Bevor ich die Daten des einen GPS Empfänger per Funk übermittle, schließe ich beide im Versuchsaufbau doch direkt an die gleiche MCU an, dann kann ich beide Signale auswerten, ohne mir am Anfang zusätzliche Komplexität einzuhandeln. Die Erwartung wäre (meiner Meinung nach) dann, dass beide die gleichen Koordinaten liefern. Tun sie aber nicht, nicht genau, jedenfalls. eine Hypothese: Könnte ja sein, dass der GPS Empfänger zwar 10 Satelliten sieht, aber das Signal nur von vieren stark genug ist, um valide Koordinaten zu extrahieren, deshalb so ungenau.
C. A. Rotwang schrieb: > Couka R. schrieb: >> C. A. Rotwang schrieb: >>> ??? GPS hat keine Genauigkeit von 0,2 m . >> >> Doch, und sogar noch besser, aber nicht mit dem 10€ Empfänger von eBay. > > Quatsch, wo gekauft ist unwichtig, Genauer wird GPS durch assestierte > Korrektur und die benötigt eine Internetverbindung o.ä. für > Korrekturdaten. Und davon schreibt der TO nix. Auch einzelne GPS-Empfänger können solche Auflösungen erreichen, indem z.B. mehr als 1 Trägerfrequenz ausgewertet wird um atmosphärische Einflüße rauszurechnen. Ist aber auch egal, mir gings nur darum, dass deine Aussage nicht so allgemeingültig ist, wie sie klingt.
C. A. Rotwang schrieb: > Und dann sollte es mich nicht wundern das Exemplartoleranzen an der > Antennenanbindung für Fehler in der bestimmung der Laufzeittoleranz > sorgen. Tausch doch mal die PÜosition der Empfänger aus - kehrt sich das > Verhältniss um oder bleibt es gleich? bin mit den Geräten durch den Garten gewandert und dann gewartet, habe mich um 180 Grad gedreht und gewartet, kein Umkehr im Fehler.
npn schrieb: > Die einzige Möglichkeit, die Genauigkeit zu verbessern, ist eine teure > kostenpflichtige SAPOS-Freischaltung. Dafür muß aber auch der Empfänger > geeignet sein. Zusätzlich zum GPS wird noch ein Korrektursignal > benötigt. Nur mit GPS allein geht das definitiv NICHT! hinter SAPOS steckt letztendlich auch ein GPS Empfänger (-System), dass den Fehler per Internet oder Funk an den Mobilen GPS Empfänger übermittelt... Genau das ist auch der Zweck meiner Anordnung, Ein Empfänger ist fix, der andere "mobil" und künstlich genau auf der gleichen Postion gehalten, wie der Referenzempfänger, Funk spar ich mir in der Versuchanordnung, alles ist per Kabel verbunden...
GPS Bastler schrieb: > Der Fehler springt nicht statistisch, sondern wächst über Sekunden > langsam an und fällt wieder ab. Das könnte durch eine zunehmende Abweichung der Taktquelle in den Empfängern sprechen. Die gelegentlich über die GPS-Zeit korrigiert wird.
Kai S. schrieb: > Laufen die > Taktgeber in den GPS Empfängern mit leicht unterschiedlichen Frequenzen > weicht folglich auch die Messergebnisse voneinander ab, aber eben nur > solange, bis das Modul die Taktquelle mit dem GPS Signal wieder > nachjustiert. keine schlechte Idee, aber müßte dann der Fehler bei gleichen "Nachjustierintervallen" nicht immer gleich sein?
GPS Bastler schrieb: > npn schrieb: >> Die einzige Möglichkeit, die Genauigkeit zu verbessern, ist eine teure >> kostenpflichtige SAPOS-Freischaltung. Dafür muß aber auch der Empfänger >> geeignet sein. Zusätzlich zum GPS wird noch ein Korrektursignal >> benötigt. Nur mit GPS allein geht das definitiv NICHT! > > hinter SAPOS steckt letztendlich auch ein GPS Empfänger (-System), dass > den Fehler per Internet oder Funk an den Mobilen GPS Empfänger > übermittelt... > > Genau das ist auch der Zweck meiner Anordnung, Ein Empfänger ist fix, > der andere "mobil" und künstlich genau auf der gleichen Postion > gehalten, wie der Referenzempfänger, Funk spar ich mir in der > Versuchanordnung, alles ist per Kabel verbunden... Ich wollte nur die (etwas eigenwillige Meinung) von Couka Raspi korrigieren. Mittlerweile hat er den Unsinn sogar wiederholt: Couka R. schrieb: > Auch einzelne GPS-Empfänger können solche Auflösungen erreichen Da kann man doch nur den Kopf schütteln :-)
A. K. schrieb: > GPS Bastler schrieb: >> Der Fehler springt nicht statistisch, sondern wächst über Sekunden >> langsam an und fällt wieder ab. > > Das könnte durch eine zunehmende Abweichung der Taktquelle in den > Empfängern sprechen. Die gelegentlich über die GPS-Zeit korrigiert wird. okay, das könnte was sein. Ich werde man die Periodizität des Fehlers untersuchen.. Danke an alle, falls jemand noch mehr Ideen hat, ich höre den Thread weiterhin ab. Grüße GPS Bastler
GPS Bastler schrieb: > keine schlechte Idee, aber müßte dann der Fehler bei gleichen > "Nachjustierintervallen" nicht immer gleich sein? Wie hoch ist die Kurzzeitstabilität der Referenztakte in den GPS Empfängern? Eine Schwankung im Sekundenbereich geht u.U. voll in die GPS Messung ein. Mindestens die Temperaturen getrennter Geräte könnte da schon mitmischen, und ob es in den üblichen Quarzoszillatoren auch noch eine Art Rauschen in der Frequenz gibt weiss ich nicht.
npn schrieb: > Couka R. schrieb: >> Auch einzelne GPS-Empfänger können solche Auflösungen erreichen > > Da kann man doch nur den Kopf schütteln :-) Ich sehe den Widerspruch zwischen meiner und deiner Aussage nicht ganz. Gute GPS-Empfänger kriegen 0,2m Auflösung hin (obacht, Auflösung nicht Genauigkeit), wäre das nicht so, würden 0,2m GENAUIGKEIT auch mit DGPS nicht hinhauen. Oder lieg ich da falsch?
GPS Bastler schrieb: > bin mit den Geräten durch den Garten gewandert und dann gewartet, habe > mich um 180 Grad gedreht und gewartet, kein Umkehr im Fehler. Hast du das mal mit mehr als zwei Empfängern gemacht? Bereits weiter oben wurde auf die Toleranzen im Oszillator des GPS-Moduls hingewiesen. Da könnte es auch mal eines mit höherer Toleranz geben. Es ist auch nicht ungewöhnlich, dass die Daten "schwanken". Ich habe hier eine alte GPS-Maus am PC dran, die am Balkon montiert ist. Die bewegt sich teilweise mit 4 km/h durch die Gegend... Ok, der Empfänger ist nicht der neueste, lustig ist es aber trotzdem.
:
Bearbeitet durch User
C. A. Rotwang schrieb: > GPS-Genaugkeit liegt bei 5 bis 20m, beide Geräte liegen innerhalb des > Fehlerintervalls. Die Breite des Fehlerintervalls hängt davon ab, wie du das Intervall definiert hast. Im den akutellen GPS Signal Specification (Sep 2008) wird im Kap. 3.8.3 SPS Position/Time Service Accuracy Standards in Table 3.8-3 für 95% der Zeit ein horizontaler Fehler von ≤ 9 m angegeben. Das hat aber nichts damit zu tun, dass zwei Empfänger am quasi selben Ort unterschiedliche Positionen berechnen, sondern beschreibt Signalaussendung, Konstellation und Ionosphärenfehler. Beim direkten Vergleich zweier Empfänger sollte man eine gemeinsame Antenne verwenden, so dass sicher gestellt ist, dass beide Empfänger das selbe Signal bekommen. Sonst passiert es schnell, dass sie nicht die gleichen Satelliten gleich gut sehen. Als Kontrolle bietet sich ein Blick auf die vom GPS ausgegebene Signalqualität der einzelnen Satelliten an.
Jens P. schrieb: > Hast du das mal mit mehr als zwei Empfängern gemacht? Bereits weiter > oben wurde auf die Toleranzen im Oszillator des GPS-Moduls hingewiesen. > Da könnte es auch mal eines mit höherer Toleranz geben. Es ist auch > nicht ungewöhnlich, dass die Daten "schwanken". Ich habe hier eine alte > GPS-Maus am PC dran, die am Balkon montiert ist. Die bewegt sich > teilweise mit 4 km/h durch die Gegend... Ok, der Empfänger ist nicht der > neueste, lustig ist es aber trotzdem. nein mit mehr als zwei Empfängern habe ich es noch nicht getestet, aber ich habe wie Du das Driften der gemessenen Empfängerposition mit mehreren km/h gesehen. Wenn man jedoch zwei Empfänger hat, die dann mit der gleichen Geschwindigkeit driften und wenn man weiß, dass der eine in Wirklichkeit steht, kann man den Fehler für den zweiten ja rausrechnen. Das mit den Oszillatoren behalte ich im Blick. GPS Bastler
Wolfgang schrieb: > Beim direkten Vergleich zweier Empfänger sollte man eine gemeinsame > Antenne verwenden, so dass sicher gestellt ist, dass beide Empfänger das > selbe Signal bekommen. Sonst passiert es schnell, dass sie nicht die > gleichen Satelliten gleich gut sehen. Als Kontrolle bietet sich ein > Blick auf die vom GPS ausgegebene Signalqualität der einzelnen > Satelliten an. gemeinsame Antenne für zwei GPS Empfänger ist sicher schwierig, aber das mit der Anzahl der Satelliten und ob es auch die gleichen Satelliten sind, sollte ich prüfen. Achso, ich habe EGNOS (https://de.wikipedia.org/wiki/European_Geostationary_Navigation_Overlay_Service) in beiden Chips aktiviert und ausserdem die russischen GLONASS Satelliten in die Messungen eingezogen. Ich werden auch mal diese Parameter variieren (i.e. abschalten). GPS Bastler
GPS Bastler schrieb: > Die GPS Empfänger liegen dicht beeinander (ca. 20 cm Abstand). beide > haben ca. 10 bis 12 Satelliten auf Empfang. Bist du sicher, dass beide Empfänger genau dieselben Satelliten als Basis für die Positionsbestimmung nutzen? Angenommen, beide nutzen jeweils 10 Satelliten, aber Empfänger 1 nutzt die Satelliten 1 bis 10 und Empfänger 2 die Satelliten 2 bis 11. Da Satellit 1 eine ganz andere Position am Himmel hat als Satellit 11, sind ihre Signale durch atmosphärische Störungen u.ä. unterschiedlich verfälscht, was letztendlich zu einem unterschiedlichen Ergebnis der beiden Empfänger führt.
Hm, deine GPS Empfänger gehen und geben eine gute Position aus. Wie hast du denn vor die Korrekturdaten zu berechnen. Denk ja nicht, dass es so einfach ist, die gemessene Position von der echten Abzuziehen und diesen Offset dann auch bei der anderen Station abzuziehen. Zu deiner Frage, was sagen denn die h/p/v-dop Werte aus dem GPGSA Datensatz? Wenn nötig solltes du auch den GPGSV anschauen. Dort siehst du, was die Empfänger sehen. btw. Was für GPS Module verwendest du denn?
GPS Bastler schrieb: > Tatsächlich können sich die GPS Koordinaten eines feststehenden Gerätes > auch ändern, aber auch nur langsam. Dass zwei Geräte einen > differenziellen Fehler von 10 m innerhalb einer Sekunden haben können, > erklärt sich mir nicht. Interessant, denn das lässt Rückschlüsse über die Arbeitsweise der Empfänger zu. Vermutlich beobachtst du das Auseinanderdriften von der L1-Präzionsfrequenz der Satelliten und dem nur quarzkonstanten lokalen L1-Oszillator im Empfänger, sowie die periodischen Korrekturen der Quarzfrequenz. Letztlich also ein Quantisierungseffekt durch die digitale Signalverarbeitung. Das GPS-Signal liegt ja tief im Rauschen und kann überhaupt nur daraus isoliert werden, indem der Empfänger versucht es mit einer bekannten Sequenz zu synchronisieren. Was da an den Korrelatoren ankommt, besteht also i.W. aus Rauschen, welches nur winzige Abweichungen von einer reinen Zufallsverteilung hat. Um daraus die verschiedenen Gold-Sequenzen der Satelliten zurückzugewinnen, muss das Rauschen also über eine längere Zeit mit den im Empfänger erzeugten Sequenzen verglichen (multipliziert und aufsummiert) werden. Da die einzelnen Bits der C/A-Sequenzen knapp 1µs lang sind, was bei Lichtgeschwindigkeit einer Strecke von 300m entspricht, ist dies zunächst einmal das räumliche(!) "Raster", in welchem der Empfänger nun versuchen kann durch Phasenvergleich des 1023kHz-Signals die Korrelation und somit die Ortsbestimmung zu verbessern. Das ist keine triviale Aufgabe, denn durch die Bewegung der Satelliten und evtl. des Empfängers sind diese Frequenzen und auch die ca. 1,6GHz Trägerfrequenzen am Empfangsort alle unterschiedlich etwas Doppler-verschoben. Es liegt nahe, dass die Taktfrequenzen aller Korrelatoren des Empfängers mittels Frequenzsynthese aus einem gemeinsamen Oszillator abgeleitet werden, der quarzgenau auf der L1-Frequenz von ca. 1,6GHz (oder einem Vielfachen davon) schwingt. Das entspricht einer Wellenlänge von ca. 20cm. Die Genauigkeit des zugrunde liegenden Quarzoszillators (16,36MHz?) reicht natürlich nicht aus und deshalb wird zumindest seine Phase gelegentlich etwas korrigiert werden müssen. Ich vermute, dass diese Korrekturen die Sprünge verursachen, die du beobachtest. Die Ortung dürfte trotzdem innerhalb der Genauigkeit liegen, die durch die alleinige Auswertung der L1-Frequenz zu erwarten ist. Um zuverlässig eine absolute Genauigkeit von wenigen Metern zu erreichen, ist auch die Auswertung des L2-Signals erforderlich, was aber zivilen Nutzern nicht möglich ist. Relative Genauigkeiten von einigen Millimetern können auch zivile Nutzer durch Auswertung der Trägerphasen von L1 und L2 erreichen, aber dazu sind sehr viel längere Meßzeiten erforderlich.
nicht"Gast" schrieb: > (1) Wie hast du denn vor die Korrekturdaten zu berechnen. Denk ja nicht, > dass es so einfach ist, die gemessene Position von der echten Abzuziehen > und diesen Offset dann auch bei der anderen Station abzuziehen. > > (2) Zu deiner Frage, was sagen denn die h/p/v-dop Werte aus dem GPGSA > Datensatz? > > (3) Wenn nötig solltes du auch den GPGSV anschauen. Dort siehst du, was die > Empfänger sehen. > > (4)btw. Was für GPS Module verwendest du denn? zu (1): eigentlich wollte ich es genauso machen, den offset bei der anderen Station abziehen. Ziel ist bei mir die genaue Postionierung innerhalb eines Umkreises von 200m um die Referenzstation, ich muß also keine Erdkrümmung oder Abweichung der Erdkrümmung von der Kugelform berücksichtigen (schätze ich mal). zu (2) wußt ich doch, dass ich noch was lernen kann: https://de.wikipedia.org/wiki/Dilution_of_Precision Die DOP Werte (die ich bisher nicht kannte) haben folgende Werte, beispielhaft herausgegriffen $GNGSA,A,3,29,18,10,26,20,,,,,,,,2.31,1.10,2.03*18 $GNGSA,A,3,29,18,10,26,21,20,,,,,,,1.86,1.06,1.53*15 $GNGSA,A,3,70,75,85,68,,,,,,,,,1.96,1.06,1.65*11 die letzten drei Werte im NMEA String, also alles Werte zwischen 1 und meistens 2. Wikipedia sagt: "Der Wert von eins beschreibt die bestmögliche geometrische Anordnung der Satelliten, ein Wert von ungefähr 6 ist noch gut. DOP-Werte größer als 10 lassen keine Auswertung mehr zu." zu (3) guter Tipp, kann ich auch die Feldstärke sehen, mit der die Sats empfangen werden zu (4) Ublox neo m8n Grüße, GPS Bastler
Yalu X. schrieb: > Angenommen, beide nutzen jeweils 10 Satelliten, aber Empfänger 1 nutzt > die Satelliten 1 bis 10 und Empfänger 2 die Satelliten 2 bis 11. Da > Satellit 1 eine ganz andere Position am Himmel hat als Satellit 11, sind > ihre Signale durch atmosphärische Störungen u.ä. unterschiedlich > verfälscht, was letztendlich zu einem unterschiedlichen Ergebnis der > beiden Empfänger führt. das ist auch das, was "Nicht Gast"Gast andeutet, in den GPGSV "Strings" (sag ich mal) steht drin, welche Satelliten tatsächlich gesehn werden und wie stark. Kann sein, dass eine bessere Antenne dafür sorgt, dass beide GPS Empfänger den identischen Satz von Satelliten am Himmel sehen. Danke für die Anregung, GPS Bastler
GPS Bastler schrieb: > zu (3) guter Tipp, kann ich auch die Feldstärke sehen, mit der die Sats > empfangen werden In den GSV Datensätzen steht nicht die Feldstärke, sondern der Signal-Rausch-Abstand.
Das ist jetzt nur Spekulation :) benutzt du das Tool von UBlox zum konfigurieren? Du kannst ja mal schauen, ob du einen Empfänger dazu bringen kannst, RTCM Daten auszuspucken und den anderen dazu sie zu fressen. Ich bin mir aber nicht sicher, ob deine Module das können.
Wolfgang schrieb: > PS Bastler schrieb: >> zu (3) guter Tipp, kann ich auch die Feldstärke sehen, mit der die Sats >> empfangen werden > > In den GSV Datensätzen steht nicht die Feldstärke, sondern der > Signal-Rausch-Abstand. sorry, SNR, in dB
Wenn ich ganz oben so lese, bin ich mir nicht sicher, ob beide Empfänger den GLEICHEN Sat zum GLEICHEN Zeitpunkt benutzen. Gibt es eine Möglichkeit die Rohdaten zu vergleichen? https://de.wikipedia.org/wiki/GPS-Technik#False_Ranging
dermi schrieb: > Gute GPS-Empfänger kriegen 0,2m Auflösung hin (obacht, Auflösung nicht > Genauigkeit), Sicherlich macht es auch kein Problem, eine Auflösung von 0,2µm hinzubekommen. Man muss nur alle, sich bei der Berechnung erge- benden Stellen anzegen, anstatt sinnvoll zu runden.
npn schrieb: > Couka R. schrieb: >> Auch einzelne GPS-Empfänger können solche Auflösungen erreichen > > Da kann man doch nur den Kopf schütteln :-) Auflösung stimmt schon, aber das ist nicht "Genauigkeit" ;-)
Harald W. schrieb: > Sicherlich macht es auch kein Problem, eine Auflösung von 0,2µm > hinzubekommen. Man muss nur alle, sich bei der Berechnung erge- > benden Stellen anzegen, anstatt sinnvoll zu runden. Das wäre dann aber nur die Auflösung der Anzeige. Die nützt aber überhaupt nichts, wenn die berechneten Stellen lediglich das Rauschen der Welt darstellen.
Wolfgang schrieb: > Harald W. schrieb: >> Sicherlich macht es auch kein Problem, eine Auflösung von 0,2µm >> hinzubekommen. Man muss nur alle, sich bei der Berechnung erge- >> benden Stellen anzeigen, anstatt sinnvoll zu runden. > > Das wäre dann aber nur die Auflösung der Anzeige. Die nützt aber > überhaupt nichts, wenn die berechneten Stellen lediglich das Rauschen > der Welt darstellen. So ist es, und deshalb macht es auch keinen Sinn, bei einer Genauigkeit von ca. 6m Bruchteile eines Meters anzuzeigen.
Harald W. schrieb: > bei einer Genauigkeit von ca. 6m Bruchteile eines Meters anzuzeigen. Ob dann unter GLEICHEN Bedingungen beide Geräte zum selben Ergebnis kämen? Anderer Sat, anderer Zeitpunkt, andere Antenne, anderes Rauschen könnten z.B. den Spaß verdeben.
Also der GPS-Algorithmus misst die Laufzeitunterschiede im 100ns-Raster (GPS-Clk 10 MHz) also übern Daumen 30m. Für ne Genauigkeit unterm Meter muss man genauer als dieses Raster werden. Die nächste Grenze an die man stösst ist die Synchronisation der SatellitenUhren auf +/-10ns. Also je nachdem welche Satelliten man einrechnet hat man ca. +/- 3m. Die Infos über die Ionosphäre kompensieren dabei lediglich die Ungenauigheit der EM-Ausbreitungsgeschwindigkeit c, also auf +/- 2,9m, der "Quantisierungsfehler" durch das Zeitraster wird dadurch nicht kleiner. Neben den GPS-Daten könn man den Doppler-Shift des Trägersignals zur Positionsbestimmung heranziehen. Der wird aber von den RF-Empfänger kompensiert. Manche GPS-Empfänger "scannen" satellitenweise, meint zuerst schauen sie ob Satellit 1 empfangen wird, dann nach Satellit 2 und so weiter bis sie genügend sehen. Unterschiedlich gestartetet GPS-Empfänger können also mit unterschiedliche Satelliten arbeiten je nachdem welche Satelliten grad sichtbar waren. Und selbst wenn die selben Satelliten gesehen werden, die Atomuhren laufen eben nicht völlig synchron, der Fehler bleibt bestehen. Und ein GPS-Hersteller prüft seine Geräte nach erzielbaren Genauigkeit des implementierten Algs/Elektronik. Also wird er Geräte ausliefern die +/- x Meter Genauigkeit haben und damit auch untereinander diese Abweichung aufweisen können.
sollten es nicht genug Satelliten sein, damit sich ein Doppler-Effekt nicht auswirkt oder damit der heraus gerechnet wird?
:
Bearbeitet durch User
● J-A V. schrieb: > sollten es nicht genug Satelliten sein, > damit sich ein Doppler-Effekt nicht auswirkt > oder damit der heraus gerechnet wird? Wieso herausrechnen? Mit Doppler-effekt kann man die Position genauer bestimmen: https://www.csmonitor.com/Science/2014/0325/Malaysia-Airlines-Flight-MH370-Doppler-effect-used-to-track-the-aircraft http://www.airliners.de/doppler-effekt-beweist-suedlichen-flugkurs-von-malaysia-airlines-boeing/31940 Die vor GPS-Satellitennavigation beruhte auf den dopplereffekt allein: https://de.wikipedia.org/wiki/Transit_(Satellitensystem) Bspw. zu dem Zeitpunkt in der Dopllereffekt die Richtung ändert steht der Satellit der Empfängerposition am nächsten.
Angehängte Dateien:
-

Koordinatendrift.png
9,9 KB
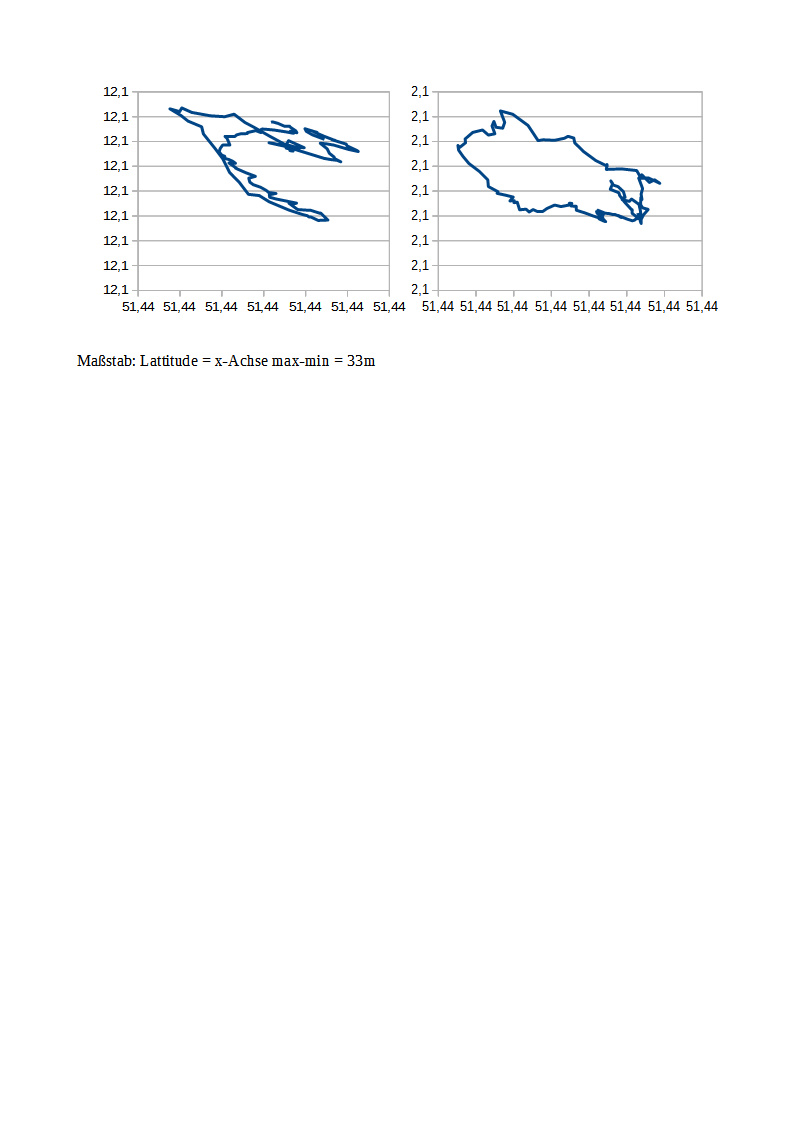
Morgen allerseits, hier mal die Drift der Koordinaten von zwei GPS Empfängern gleicher Bauart am gleichen Ort, zur Gleichen Zeit gestartet, ca. 45min nach dem Einschalten der Stromversorgung. Anzahl der empfangenen Satelliten: 10 und 6 Ich hätte erwartet, dass beide Driften ungefähr gleich wären. Gruesse, GPS Bastler
GPS Bastler schrieb: > gemeinsame Antenne für zwei GPS Empfänger ist sicher schwierig, ... Wenn das scvhon schwierig ist ...
Wolfgang schrieb: > Beim direkten Vergleich zweier Empfänger sollte man eine gemeinsame > Antenne verwenden, GPS Bastler schrieb: > Der zweite Schritt ist es, den einen stationären GPS Empfänger den > Fehler messen zu lassen und dem anderen mobilen Empfänger diese Info > zukommen zu lassen, damit er seine Positionsdaten entsprechend > korrigiert. Da ist eine gemeinsame Antenne natürlich das Mittel der Wahl;) MfG Klaus
...Da bleibt eigentlich nur, darauf zu warten, bis GALILEO komplett betriebsbereit ist. Damit soll die Positionsgenauigkeit angeblich 10 cm sein. Auch in der Vermessungsbranche wird GPS eingesetzt, allerdings nicht als Referenz, sondern nur zur Kontrolle (außer bei grober Aufnahme, da reicht GPS). Die bisherigen optischen Methoden liefern 1 cm Genauigkeit, im Nahbereich auch unter 1 mm (Tatort und Unfallaufnahme). Interessant ist auch "alpentunnel.de", die Durchstichgenauigkeit lag bei 50 cm. Eine wahre Meisterleistung mit den damaligen alten Theodoliten (vor WILD). Gruß - Werner
:
Bearbeitet durch User
GPS Bastler schrieb: > Ich hätte erwartet, dass beide Driften ungefähr gleich wären. Sie sind doch gleich - innerhalb der GPS-Toleranz. Du darfst Dich nicht davon täuschen lassen, das du vermeindlich immer das selbe -die unveränderte Position des Empfängers- misst. Es ist eben nicht immer die gleiche Messung, sondern in Wahrheit misst man die relative Position zu den Satelliten und die ändert sich ständig, dehalb driften ja die Ergebnisse eines GPs-Empfängers schon. Selbst nach 12h der Umlaufzeit der -GPS-Sats- sollten nicht die gleichen Messergebnisse vorliegen, die Ionosphäre Tages- und Jahreszeitlichen Schwankungen unterliegt. Interessant wäre ein Versuch mit gleicher Antenne auf jeden Fall. Wobei es mich nicht wundern würde, auch dabei unterschiedliche Ergebnisse zu sehen, wegen -unterschiedlicher Startzeiten Empfänger -Unterschiede in der Firmwareversion -Unterschiede in den abgespeicherten Daten von letzten Tracking -Unterschiede in der Dämpfung Antennenbuchse -> RF-Module -Unterschiede Referenz-Takt (Temperatur, exemplarstreuung) ein Unterschied von ein paar Nanosekunden macht da gleich ein paar Meter Unterschied in der relativbestimmung aus. Mit zwei Antennen ... das lamda der Trägerwelle ist mit 20cm ziemlich kurz, da können auch bei kurzen Abstand die Verhältnis schon andere sein. Versuch mal den horizontalabstand beider Antennen auf ganzzahlige Vielfache von Lambda zu bringen, vielleicht passenden die Verhältnnise dann besser. obwohl das bei der Vielzahl von aktiven Satelliten ja auch vergebliche Mühe ist, Mehrwegeausbreitung wäre auch noch ein Thema.
Werner H. schrieb: > Interessant ist auch "alpentunnel.de", die Durchstichgenauigkeit lag bei > 50 cm. Eine wahre Meisterleistung mit den damaligen alten Theodoliten Naja schon die alten Griechen schafften 60 cm Genauigkeit beim Gegenortvortrieb: https://de.wikipedia.org/wiki/Tunnel_des_Eupalinos
Werner H. schrieb: > ...Da bleibt eigentlich nur, darauf zu warten, bis GALILEO komplett > betriebsbereit ist. > Damit soll die Positionsgenauigkeit angeblich 10 cm sein. die der Privatmann auch bekommt?
● J-A V. schrieb: > die der Privatmann auch bekommt? Privatmann oder armer Schlucker? Also mit Commercial Service soll es 1 bis 2 Grössenordnungen genauer sein als Open Service der wiederum schon genauer als GPS sein soll.
● J-A V. schrieb: > die der Privatmann auch bekommt? Zumindest soll ein Navi damit dann so genau sein, das es weiss, auf welcher Fahrspur Du gerade fährst.
Harald W. schrieb: > ● J-A V. schrieb: > >> die der Privatmann auch bekommt? > > Zumindest soll ein Navi damit dann so genau sein, das es weiss, > auf welcher Fahrspur Du gerade fährst. Ja insbesonders bei Autobahnbaustellen und anderer Gegebenheiten nötig bei der der Verkehr über die halbe Gegenfahrbahn geleitet wird ...
Klaus schrieb: > GPS Bastler schrieb: >> Der zweite Schritt ist es, den einen stationären GPS Empfänger den >> Fehler messen zu lassen und dem anderen mobilen Empfänger diese Info >> zukommen zu lassen, damit er seine Positionsdaten entsprechend >> korrigiert. > > Da ist eine gemeinsame Antenne natürlich das Mittel der Wahl;) Erstmal geht es doch wohl darum, sein Messmittel zu kennen. Um festzustellen, ob die Abweichungen an unterschiedlichem Empfang oder an den Empfänger liegt, ist doch wohl ratsam, die Ursachen der Reihe nach auszuschließen.
GPS Bastler schrieb: > Differentielles GPS. > Der erste Schritt dazu ist (meiner Meinung nach), zwei GPS Empfänger zu > vergleichen. > Der zweite Schritt ist es, den einen stationären GPS Empfänger den > Fehler messen zu lassen und dem anderen mobilen Empfänger diese Info > zukommen zu lassen, damit er seine Positionsdaten entsprechend > korrigiert. Das funktioniert nicht so einfach. Gründe wurden ja schon genannt: Unterschiedliche Satelliten und Atomzeiten der beiden Empfänger. Beim richtigen DGPS wird deshalb nicht nur die Positionsabweichung bestimmt sondern es werden Laufzeitkorrekturwerte der einzelnen Satelliten bestimmt und an den mobilen Empfänger übertragen. Damit können dann die Laufzeiten der empfangenen Satelliten einzeln korrigiert werden und erst dann die Position errechnet. Dafür braucht es dann aber speziell dafür geeignete GPS-Module.
Mich haben die Messungen von GPS Bastler beeindruckt. Sie besagen, dass man nicht einfach so einen Differential GPS Setup bauen kann, und sich auch keins andrehen lassen sollte. Als naechsten Schritt waere zB die Abhaengigkeit der Messungen von der Temperatur und dem Antennen signal interessant. Wir wissen glaub noch nicht, ob die GPS Module externe Antennen verwenden. Falls ja, wuerde ich eine Antenne ueber einen Spiltter fuer beide Module verwenden. Und im gleichen Setup, die Module weg von der Sonne in einer isolierten Buechse thermostatisieren.
Bitte hört doch mit der "gemeinsamen Antenne" auf... Ziel des TO ist es doch, die Genauigkeit eines mobilen GPS-Empfängers, der im Bereich von ca. 50m um einen anderen, feststehenden GPS-Empfängers unterwegs ist, zu erhöhen. Was soll denn da eine gemeinsame Antenne? Daß die beiden GPS-Empfänger momentan über Kommunikationskabel verbunden sind, dient doch nur der Vereinfachung des Versuchs. So. So einfach, wie sich klein Kurtchen das differential GPS vorgestellt hat (ich hätte es übrigens ganz genauso angefangen), ist es also nicht. Man müßte sicherstellen, daß beide Empfänger die gleichen Satelliten verwenden, und sie müssen die Korrekturdaten pro Satellit einzeln austauschen. Ist mit einfachen Empfängern anscheinend nicht möglich. Gibt es andere, die man "hacken" kann?
Ich habe einen (zufällig getroffenen) Profi-Vermesser gefragt: Eine Genauigkeit im cm-Bereich ist möglich, wenn man den passenden (Profi)Empfänger sowie Korrekturdaten hat. Die Korrektur bekommt man von den Landes-Vermessungsämtern über Funk (GSM), angeblich "preiswert". Nähere Angaben waren nicht zu bekommen. Es bleibt also der Umbau eines standard-GPS in ein Profigerät. Gruß - Werner
TomH schrieb: > Man müßte sicherstellen, daß beide Empfänger die gleichen Satelliten > verwenden, und sie müssen die Korrekturdaten pro Satellit einzeln > austauschen. Nö die müßen die Phasenlage des Satellitensignals auswerten, die GPS-Daten sind prinzipiell zu ungenau um damit in den cm Bereich zu kommen. https://www.kickstarter.com/projects/swiftnav/piksi-the-rtk-gps-receiver nach unten scrollen. die "üblichen" GPS-Empfänger sind nicht in der Lage diese Phase auszuwerten.
Werner H. schrieb: > Die Korrektur bekommt man von den Landes-Vermessungsämtern über Funk > (GSM), angeblich "preiswert". Nähere Angaben waren nicht zu bekommen. Natürlich gibt es nähere Angaben. Es gibt sogar Firmen die das anbieten, z.B: http://www.axio-net.eu/produkte-loesungen/d/axio-net-ped/
Ok, der zitierte Textteil von mir war leider schon wieder unwissende Spekulation. Jetzt habe ich das Zeug im Kickstarter-Link gelesen und kann die Komplexität des Themas erahnen, aber längst nicht durchsteigen. Also sorry für obige Spekulationen, halte mich jetzt raus. Die gemeinsame Antenne, die immer wieder in Antworten hier auftauchte, sollte jetzt aber vom Tisch sein, oder? Darum ging es mir hauptsächlich.
Mit der gemeinsamen Antenne, fuer einen Versuch haette man herausfinden koennen, ob die 2 Empfaenger auch den gleichen wert liefern. Fuer die Anwendung geht's natuerlich nicht.
:
Bearbeitet durch User
Hallo zusammen, irgendwie stehe ich grad auf dem Schlauch. Der Beitragsersteller liefert einen Artikel zu DGPS auf Wikipedia, behauptet das die Genauigkeit bei <0,2m liegen kann. Dabei steht doch in dem Artikel schon im 2. Abschnitt: "Wie stark die Genauigkeit erhöht werden kann, hängt hauptsächlich von der Entfernung des DGPS-Empfängers von der Referenzstation ab. Die erreichbare Genauigkeit liegt je nach Qualität des Empfängers und der Korrekturdaten zwischen 0,3 m und 2,5 m für die Lage (x, y) und bei 0,2 m bis 5 m für die Höhe. Hochqualitative Systeme werten zusätzlich die Phasenverschiebung der Trägerwelle aus (wie z. B. bei geodätischen Empfängern üblich) und erreichen so Genauigkeiten von wenigen Millimetern (± 1 mm bis ± 10 mm pro km Abstand zur Referenzanlage)." Hat er so "hochqualitative Systeme" und wie weit sind seine Empfänger von der Referenzstation entfernt. Und ist er eventuell in der nähe einer staatlichen Behördeneinrichtung / militärisch genutzten Gegend? MfG EGS
EGS schrieb: > Hat er so "hochqualitative Systeme" und wie weit sind seine Empfänger > von der Referenzstation entfernt. Das hat nichts mit der Qualität sondern mit dem Prinzip zu tun. Stichwort RTK (en. Real Time Kinematic) https://en.wikipedia.org/wiki/Real_Time_Kinematic
>>> Nanaosekunden > Die Korrektur bekommt man von den Landes-Vermessungsämtern über Funk >> (GSM), angeblich "preiswert". Nähere Angaben waren nicht zu bekommen. Wenn diese Ämter/Firmen Korrekturdaten zum Kunden liefern, bleibt bei mir immer noch die Frage, ob diese Daten TROTZ Laufzeitunterschieden bei der Übermittlung noch gut verwertbar sind. Wahrscheinlich läuft diese Messung über viele STunden um die unterschiedlichen ping-Zeiten rauszurechen?
Ich beschäftige mich mit GPS seit Anfang der Neunziger, als ein Gerät noch mehrere Tausend DM kostetet und Minuten für die erste Koordinate brauchte die dann noch nur 100m genau war. Genauer nütze es ohnehin nicht wenn man mit den 1:500 000 TPC-Karten der Amis in Nordafrika oder Himalaja unterwegs war und hat trotzdem auf den rechten Weg gebracht. In den 25 Jahren seitdem kommem immer wieder Verbesserungen um mindestens eine Größenordnung raus, da verliert man schon den Überblick wieviel Potential in dem System noch steckt und wieviel Genauigkeit schon "ausgelutscht" ist. Es hilft immer mal nach der einfachen Formel Lichtgeschwindigkeit = Laufstrecke/Messinterval nachzurechnen auf wieviel Nanosekunden genau GPS arbeiten muß um cm Genauigkeit zu erreichen. Dann schaut man sich die Verwendete Hardware an (Bitraten Signal, Atomuhr-Jitter) und kann gut abschätzen was realistisch ist. Sehr empfehlensrat der Vortrag vom GPS-Projektleiter Parkinson auf youtube : https://www.youtube.com/watch?v=Flo-lQ1uyP0 - der ist aber für nicht Muttersprachler erst nach mehrmaligen Hören verständlich. Und es hat sich da auch einiges an Begriffsverschiebungen ergeben. Was man vor 20 Jahren unter Differential verstand ist nicht unbedingt das gleiche wie heute. Ja es geht um Referenzpunkte, aber das können auch schon die Gemeinsamkeiten gewesen sein. Die Darstellungen in der WP sind IMHO unvollständig, bis zur Verfälschung vereinfachend und inkonsistent. Was erklärbar ist, GPS benutzt ne Menge an ausgefuchster Nachrichtentechnik, die nur noch ET-Studenten in höherenen Semestern gelehrt wird. Gut ist auch sich mal die selbstgebauten GPS-Empfänger aunzuschauen wie diesen: http://www.aholme.co.uk/GPS/Main.htm. Da wird schnell deutlich das viele "Tuningoptionen" dem Normalverbraucher nicht mehr zugänglich sind, da der nur noch NMEA-Daten sieht die am Ende einer langen Verarbeitungskette stehen. Interessant finde ich den Hinweis das das cm-Verfahren wohl für GLONASS funktioniert. Da hat jeder Sat seine eigene Trägerfrequenz und lässt sich für Phasenmessung leichter identifizieren als bei den Amerikanern wo die Sats per Code Spreizung identifiziert werden und dann noch auf mehrenen Frequenzenzen Spread Spectrum senden.
Ich kenne das nur von den Drohnen.. Die stehen ja uch wie eine 1 in der Luft während sie sich nur einige Zentimeter austarieren. Meine ist ein Selbstbau und ich musste dreimal das GPS wechseln.. mitlerweile bin ich beim Ublox NEO-8M.. das 6M funktionierte 3 Monate Super und dann nur noch umhergesteuere. Neo7-M war auch nicht befriedigend und mit dem 8M steht die Kiste wieder wie eine 1 über dem Feld. Wieso das 6M zuerst noch gut funktionierte ist mir ein Rätsel.. ich hatte es einfach mal auf das "gute" Wetter geschoben.
Toto mit Harry schrieb: > Wieso das 6M zuerst noch gut funktionierte ist mir ein Rätsel.. ich > hatte es einfach mal auf das "gute" Wetter geschoben. Wetter ist u.U. die richtige Begründung, die Ausbreitungsgeschwindigkeit ist von der Ionossphäre abhängig und die schwankt je nach Sonneneinstrahlung. Jeder Funker kann dir da stundenlange Erklärungen geben, bspw über die E-Schicht an einem langen Sommertag: https://www.darc.de/der-club/referate/ajw/lehrgang-te/e09/
Der GPS Ansatz mit allen Sateliten auf derselben Frequenz und zur Verbesserung der Qualitet dasselbe auf einer zusaetzlichen zweiten Frequenz macht schon Sinn. Alle auf derselben Frequenz bedeutet es gibt keine Frequenzbevorzugung durch Sender, Verstaerker, Antennen. Die zweite Frequenz erlaubt die einzelnen Laufzeiten zu berechnen. Die Traegerfrequenz ist 1.57GHz, die Chipfrequenz ist 1.023MHz, dh es sind 1500 oder so Perioden pro Chip. Ist Sender und Receiver auf den Chip synchron, addiert sich das signal. Je mehr Perioden aufeinander im selben Chip sind, desto mehr addiert sich das Signal. Das maximale Signal bekommt man wenn alle Perioden der 1.57GHz im selben Chip sind. Eine Frequenznachfuehrung maximiert also das Signal. Wie auch immer es moeglich ist ein so flaches Maximum zu finden ... eine Periode ist 750ps lang, das waeren dann 20cm Aufloesung.
:
Bearbeitet durch User
Sapperlot W. schrieb: > Eine Frequenznachfuehrung maximiert also das Signal. Wie auch immer es > moeglich ist ein so flaches Maximum zu finden ... eine Periode ist 750ps > lang, das waeren dann 20cm Aufloesung. Das mit den Chips ist mir klar, mit diesen erreicht man ja das was ich hier als GPSGnauigkeit im Bereich 5 - 20 m bezeichne. Unklar sind mir die (Schaltungs-)technische Details wie man auf größerer Genaugikeiten durch Phasenmessung der Trägerwelle kommt und ich vermute das das bei GLONASS einfacher sein könnte. Gerade bei der Frequenznachführung sehen ich bei 5+ Satelliten die auf der selben Frequenz gleichzeitig senden ein Problem. Wenn keiner bevorzugt wird sind treffen doch mehrere Sinuswellen beliebige Phasenlage gleichzeitig ein und ein Phasendetector hat m.E. seine liebe Not den richtigen zu treffen und nicht irrtümlich ein virtuellen Träger der entstandet wenn zwischen den Sinuswellen verschiedenenr Träger "wechselt". Dopplereffekt macht den Aufwand sicher auch nicht geringer, insbesonders wenn sich der Empfänger bewegt. Und mir ist auch klar das man bei der starken Dämpfung auf Spektrumspreizung angewiesen ist um überhaupt noch was zu detektieren. Bei Satelliten mit individuellen Frequenzen (GLONASS) kann man das Problem mit einem scharfen Bandfilter vor dem Phasendetektor lösen. Wie man das GPS macht (oder machen könnte) ist mir noch nicht klar - ich kann mir nicht vorstellen wie ein Phasendetector bei diesem Szenario funktionieren. soll/kann.
Ich muss heute noch was "nützliches" tun und kann jetzt nicht den ganzen thread lesen, aber ein paar Punkte: - Du willst Lady Heather haben: < http://www.ke5fx.com/heather/heather.pdf > < http://www.ke5fx.com/heather/readme.htm > - 200m um eine Referenzstation kann immer noch am Mehrwege-Empfang scheitern - Für Tests wäre der Betrieb an EINER Antenne schon mal interessant. Mit einem power divider alleine ist man da aber noch nicht am Ziel weil die GPSe um die Stromversorgung der Antenne konkurrieren. - Du willst die time nuts Liste auf febo.com abonieren. Gruß, Gerhard
oszi40 schrieb: > Wenn diese Ämter/Firmen Korrekturdaten zum Kunden liefern, bleibt bei > mir immer noch die Frage, ob diese Daten TROTZ Laufzeitunterschieden bei > der Übermittlung noch gut verwertbar sind. Was hat das mit Laufzeitunterschieden bei der Übermittlung zu tun? Die Zeitkonstante für die Gültigkeit der Daten hängt von der Stabilität der Ionosphäre ab, d.h. wie gut die übermittelten Korrekturdaten die Änderungen der Abweichung der Laufzeit/Aussendezeit zwischen jeweiligem Satellit und Empfänger beschreiben. Einerseits geht also der Abstand zwischen Referenzpunkt und Empfänger ein, weil der Signalweg eben doch etwas unterschiedlich ist (DGPS) oder des Ionosphärenmodell die Situation nicht beliebig gut beschreibt (z.B. EGNOS) und anderseits ändert sich der Signalweg zwischen Korrekturwertbestimmung und Empfang der Korrekturdaten (Ionosphäre ändert sich, Weg der Satellitensignale ändert sich). Die Pseudo-Range Fehler durch das Alter der Korrekturdaten liegen in der Größenordnung von Null-Komma-irgendwas Metern pro Minute und gehen dann mit dem DOP-Wert in den Positionsfehler ein. http://www.nav.uni-stuttgart.de/navigation/publikationen/fachartikel/2003/thiel_EURAN_june03.pdf
Gerhard H. schrieb: > - Für Tests wäre der Betrieb an EINER Antenne schon mal > interessant. Das wurde in diesem Thread bereits kategorisch abgelehnt. Eine systematische Vorgehensweise hat hier wohl keine reelle Chance ;-(
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.