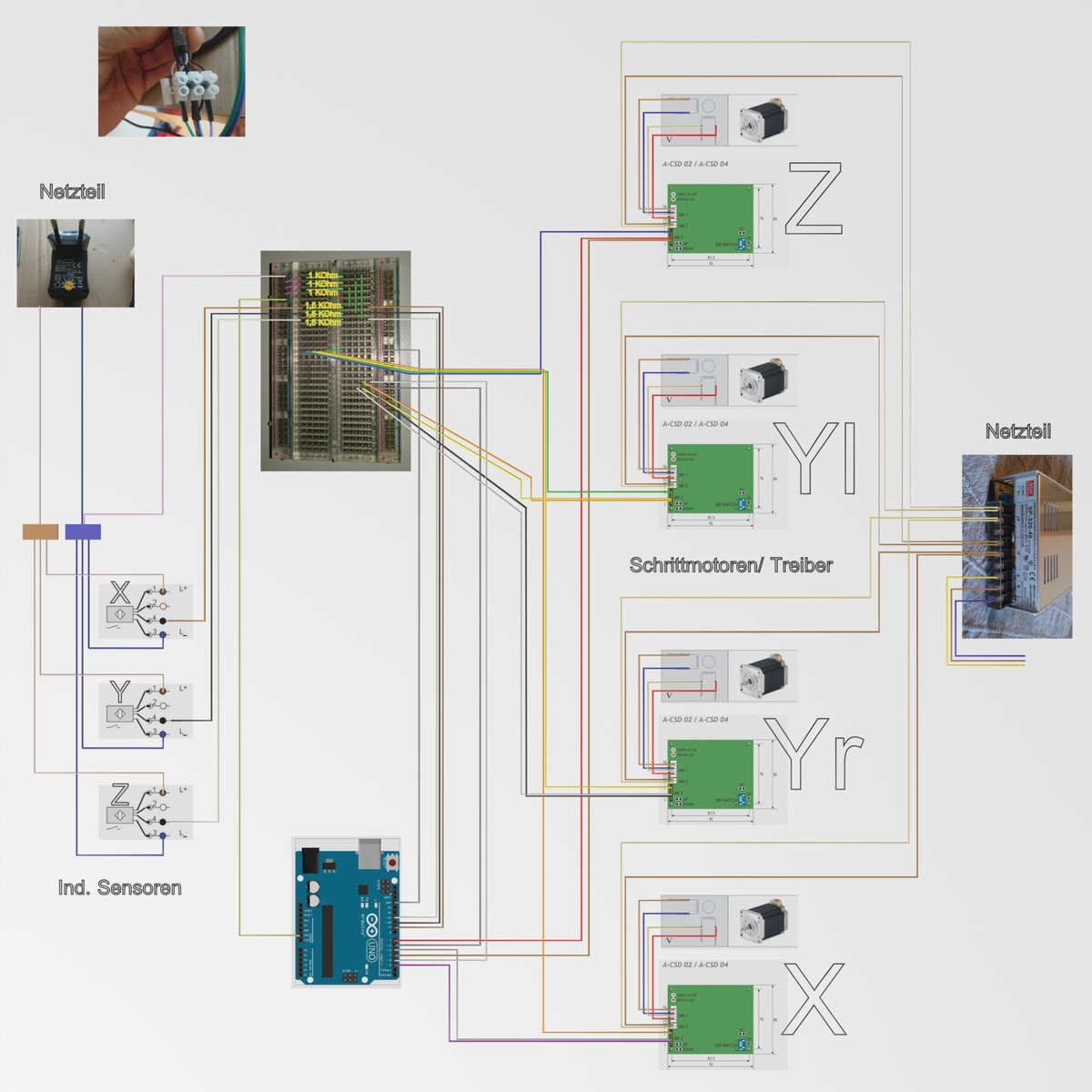
Hallo, ich bin gerade dabei mir eine CNC Fräse zusammenzubauen. Bei der Elektronik bin ich etwas unsicher Könntet Ihr da drüberschauen - insbesondere nach V, A und Verkabelung, damit ich nichts grille? (Die komischen Farben der Verbindungen sind meine Kabelfarben - also nicht wundern :) Grundsätzlich soll das Ganze via UniversalGCOdesender - Grbl- Arduino UNO- 4 Schrittmotortreiber (CSD 04.V) - 4 Schrittmotoren 4A (Sanyo Denki 103-H7126-1740)und 3 Induktive Sensoren (Autosen AA008) funktionieren. Die Y- Achse wird von 2 Motoren (Yl,Yr) getrieben. Vielen Dank Sorin
Angehängte Dateien:
-

CNC_PLan.jpg
240 KB
Abgesehen davon dass solche Zeichnungen nicht sehr viel aussagen - ch kann da nicht viel erkennen. Du wirst dir schon die Mühe machen müssen, einen richtigen Schaltplan zu erstellen.
Hi Hatten wir das Bild nicht die Tage schon gehabt? MfG
Beitrag #5103005 wurde vom Autor gelöscht.
Beitrag #5103012 wurde vom Autor gelöscht.
Angehängte Dateien:
-

Unbenannt.JPG
22 KB
Warum betreibst du diesen Aufwand? Das gibt es doch fertig auf einer Platine. Google mal nach arduinoclub Pascal
Angehängte Dateien:
-

WP_20170806_014.jpg
62 KB -

WP_20170806_016.jpg
80 KB -

WP_20170806_017.jpg
41 KB
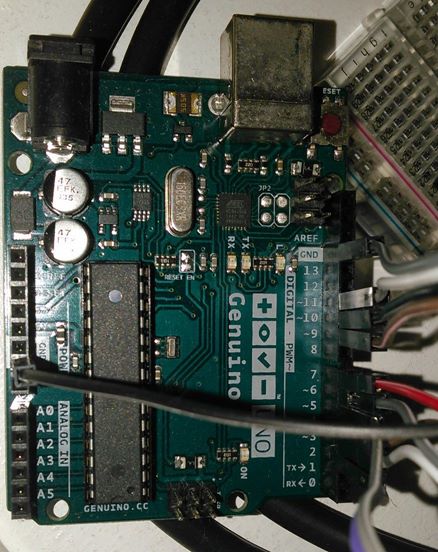

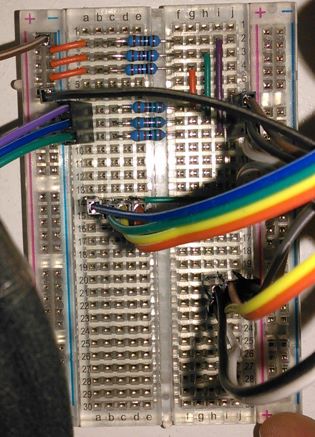
Ja, ich hatte am Freitag angefragt. Leider kam da überhaupt keine Antwort. Deshalb dachte ich, dass es vielleicht zu wenig informativ sei. Anbei die Fotos der Verkabelung. Wär wirklich super, wenn Jemand das anschauen könnte.
Du hast es leider immer noch nicht verstanden: Du bekommst keine sinnvollen Antworten, weil Du keine sinnvollen Informationen lieferst. Die universelle Sprache der Elektroniker ist der Schaltplan. Siehst Du in Deinem Post irgendwo einen Schaltplan? Ich nicht. Deshalb wirst Du auch keine Antworten bekommen.
Kennt Jemand eine Freeware mit der man auch als Laie leicht einen Schaltplan erstellen kann? Ich hatte das mit Fritzing versucht, hatte da aber das Problem, dass es meine Schrittmotorentreiber und Motoren nicht in der Bibliothekt gibt.
Sorin H. schrieb: > Kennt Jemand eine Freeware mit der man auch als Laie leicht einen > Schaltplan erstellen kann? KiCAD http://kicad-pcb.org/
Sorin H. schrieb: > Kennt Jemand eine Freeware mit der man auch als Laie leicht einen > Schaltplan erstellen kann? Zb. Bleistift und Digicam.
Sorin H. schrieb: > insbesondere nach V, A und Verkabelung, damit ich nichts grille? Kein Massesternpunkt, die Schrittmotor-Treiber ohne seriösen Pufferelko dürfen nur (10-15) zentimeterlange Leitungen zum Ausgangselko vom Netzteil haben, und ein Steckbrett als Datenverteiler ist komplett unseriös. Was meinst du, machen 2 Schrittmotore beim Einschalten ? Sie springen auf die nächste Rastposition. Keineswegs beide in dieselbe Richtung. Das Portal wird also immer schiefer. Man müsste mindestens Referenzfahrten machen, besser aber Zahnriemenkopplung der Achsen und nur 1 Motor. Und das Steckernetzteil sieht nicht nach einer seriösen Stromquelle für Elektronik aus.
Sorin H. schrieb: > CSD 04.V Ich hab nur mal rasch die Seite aufgerufen: Fazit -> Solchen Schrott würde ich nicht verbauen. Keine Angabe über die IO-Signale (Spannungsbereich, Beschaltung), keine galvanische Trennung zwischen digitalem Teil und Leistugnsteil ersichtlich, keine Möglichkeit für Encoder zu verbauen (Schrittverlust bei CNC ist mehr als wahrscheinlich)... Sorin H. schrieb: > Autosen AA008 Definiert gerade mal das Kabel, und nicht der Sensor. Ich nehme an, du willst einen induktiven NäherungsSCHALTER verwenden. Wie willst du damit eine Position regeln können (Schrittverluste). Oder ist der nur zum Referenzieren gedacht? Sorin H. schrieb: > Ich hatte das mit Fritzing versucht, hatte da aber das Problem, dass es > meine Schrittmotorentreiber und Motoren nicht in der Bibliothekt gibt. Deine Motoren interessieren wenig. Es reicht ein Steckersymbol, wenn die Gegenseite definiert ist (was bei diesen Treibern ja nicht der Fall ist). Ich denke, du hast dein Projekt nicht durchdacht und nur sehr wenig Ahnung von der Materie. Mit diesem Aufbau ist aus meiner Sicht maximal ein billig 3D Drucker möglich, oder eine Schaumstofffräse. Aber mehr wird sicher nicht drin liegen.
Patrick B. schrieb: > keine Möglichkeit für Encoder zu verbauen (Schrittverlust bei CNC ist > mehr als wahrscheinlich)... Nein. CNC muss so ausgelegt sein, dass kein Schrittverlust auftritt. Denn wenn es einen Schrittverlust gäbe, bei einem Motor (X?) von 2 fahrenden (XY), läuft der Fräser in einer falschen Bahn. Es nützt auch nichts, den Schritt schnellstmöglich nachzuholen (man kann ihn nicht sofort auslösen, das wird zu schnell für Motor und Mechanik, man muss davon ausgehen, dass sich das Tempo durch den einen fehlenden Schritt verändert hat und eine neue Beschleunigungsrampe fahren bis man schneller als vorgesehen fährt um eines Tages die Sollposition wieder zu erreichen), das Werkstück ist bereits versaut. Nur bei extremer Untersetzung (1/1000mm pro Schritt?) könnte man rechtzeitig mit einer neuen Beschleunigungsrampe eingreifen, aber dazu müsste man diesen 1/1000mm auch am Incrementsensor erkennen können. Da die Mechanik in dem Fall massiv überqualifiziert wäre, besser positioniert und misst als sie verwindet und vibriert, ist das aber Unsinn.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.