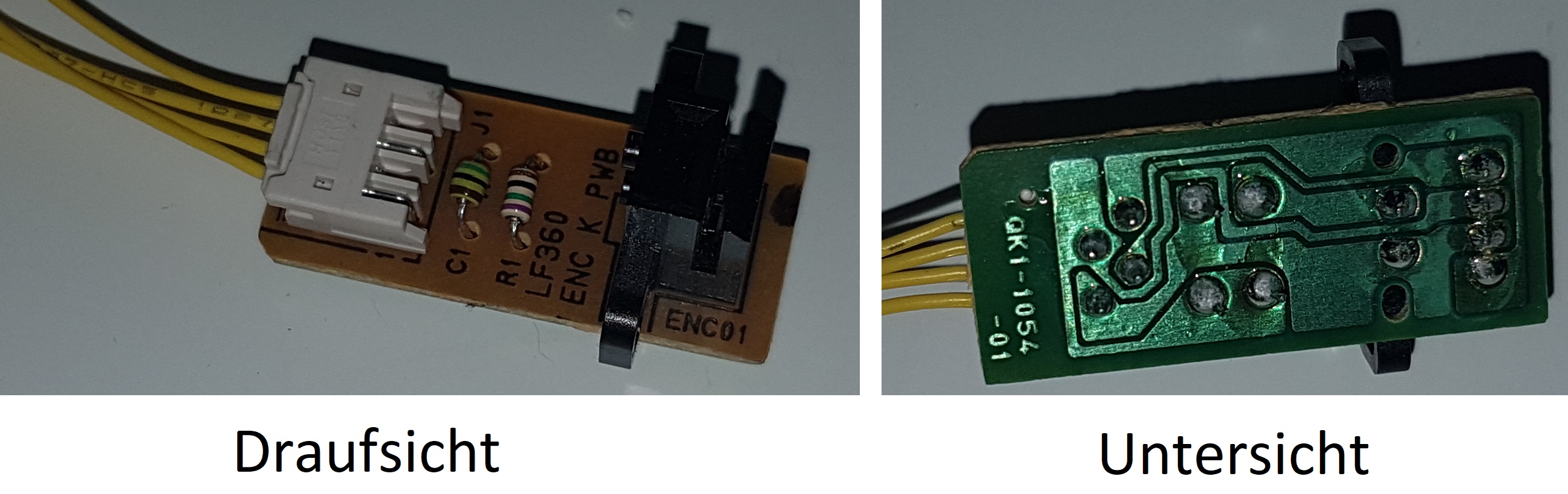
Hallo zusammen, ich bin noch sehr neu im Umgang von Mikrokontrollern, für eure Hilfe bin ich jetzt schon sehr dankbar! Nun mein Anliegen: Ich habe aus einem Drucker (unter anderem) die inkrementellen Winkelgeber ausgebaut und will diese nun wieder mit Hilfe von meinem Arduino benutzen. Der Winkelgeber auf dem Foto hat 4 Anschlüsse und hat die Bezeichnung "QK1-1054-01". Bei dem Schlitz über "ENC01" läuft eine Kunststoffscheibe mit sehr feinen schwarzen Linien. Wie muss ich die Kabel anschließen, damit ich sinnvolle Ausgabewerte auf dem Arduino erhalte? LG Simon
Angehängte Dateien:
-

Winkelgeber_aus_Drucker.jpg
470 KB
Ich rate mal, dass zwei versetzte Lichtschranken drinnen sind und einfach gray-code aus dem Ding rauskommt....
Simon N. schrieb: > Wie muss ich die Kabel anschließen, damit ich sinnvolle Ausgabewerte auf > dem Arduino erhalte? Wie einen Drehgeber (Drehencoder) mit zusätzlicher LED zur Beleuchtung. Simon N. schrieb: > "QK1-1054-01" Hilft nicht viel. Wichtig ist die Bezeichnung der Lichtschranke. Daraus ergibt sich dann auch die Belegung des Platinensteckers.
Vielleicht hilft dir das hier weiter: http://homofaciens.de/technics-base-circuits-encoder-disc_en.htm
Die Encoder aus Druckern die ich bisher gesehen habe sind alle clevere ICs die eine LED drin haben und einen Sensorchip der mit 5V arbeitet und sauber aufbereitete Signale ausgibt. In dem Bild rechts (Ansicht Lötseite) würde ich sagen: rechts oben und unten sind die Ausgänge A und B links oben +, links unten GND (LED Versorgung + über den R) Die Spannung könnte auch andersrum sein, das kriegt man aber leicht raus wenn die Platine noch da ist wo der Encoder angeschlossen war.
Hallo, danke für die Antworten! @ Max, sieht so aus :) @ Matthias, danke. @ Mick, der Link war hilfreich! @ Johannes: Zerstöre ich den Sensor, wenn ich die Spannung falsch anschließe? Und Könntest du die Anschlüsse auf dem Bild markieren? Ich bin mir nicht sicher, was du mit links oben/unten meinst. Ich weiss nicht mehr, wie die Platine virher montiert war, ich habe sie abgeumzwickt. LG Simon
C1 ist zwischen Masse und Vcc. Die breit gerootete Fläche ist die Masse... Zur Sicherheit immer mit einen Labornetzteil den Strom auf so 10mA begrenzen. Bei vertauschen des Polarität müsste nichts passieren, da die emittierende led sperrt.
@ Johannes, hab jetzt verstanden was du meintest! @ aSma, was bedeutet breit gerootet? LG Simon
> @ aSma, was bedeutet breit gerootet? Sowas? http://praxistipps.chip.de/android-rooten-so-gehts_3692 StromTuner
Angehängte Dateien:
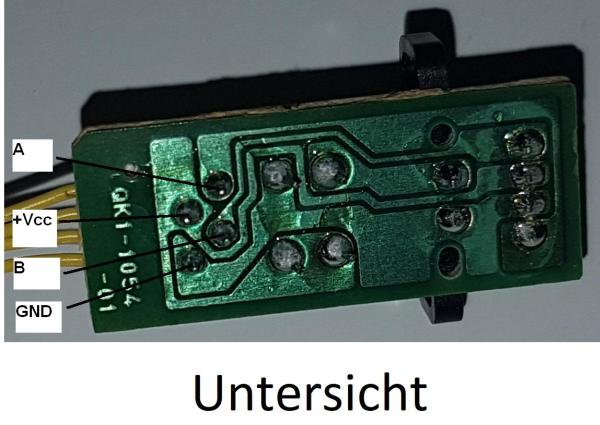
Etwa so wie im Anhang. Sowohl Plus und Minus als auch A und B können aber vertauscht sein. Deswegen die Versorgung, wie o.a., vorsichtig ausprobieren.
Mercre! So hab ich mir das jetzt dann nach den Hinweisen auch gedacht, danke für die Bestätigung und danke an alle! Ich geb noch ein Feedback, wenn es funktioniert. LG Simon
Es funktioniert, vielen Dank! Allerdings kann der Arduino die Signale viel zu langsam auswerten... LG Simon
Setz bei A & B ein Pullup von 1.8k - 2,7k ein. Sonst nehme einen stm32f103, der hat 4 Hardware Encoder. Zwar leider nur 16 bit groß, aber das ist nur zweitrangig.
Angehängte Dateien:
-

Sensor_2.jpg
690 KB
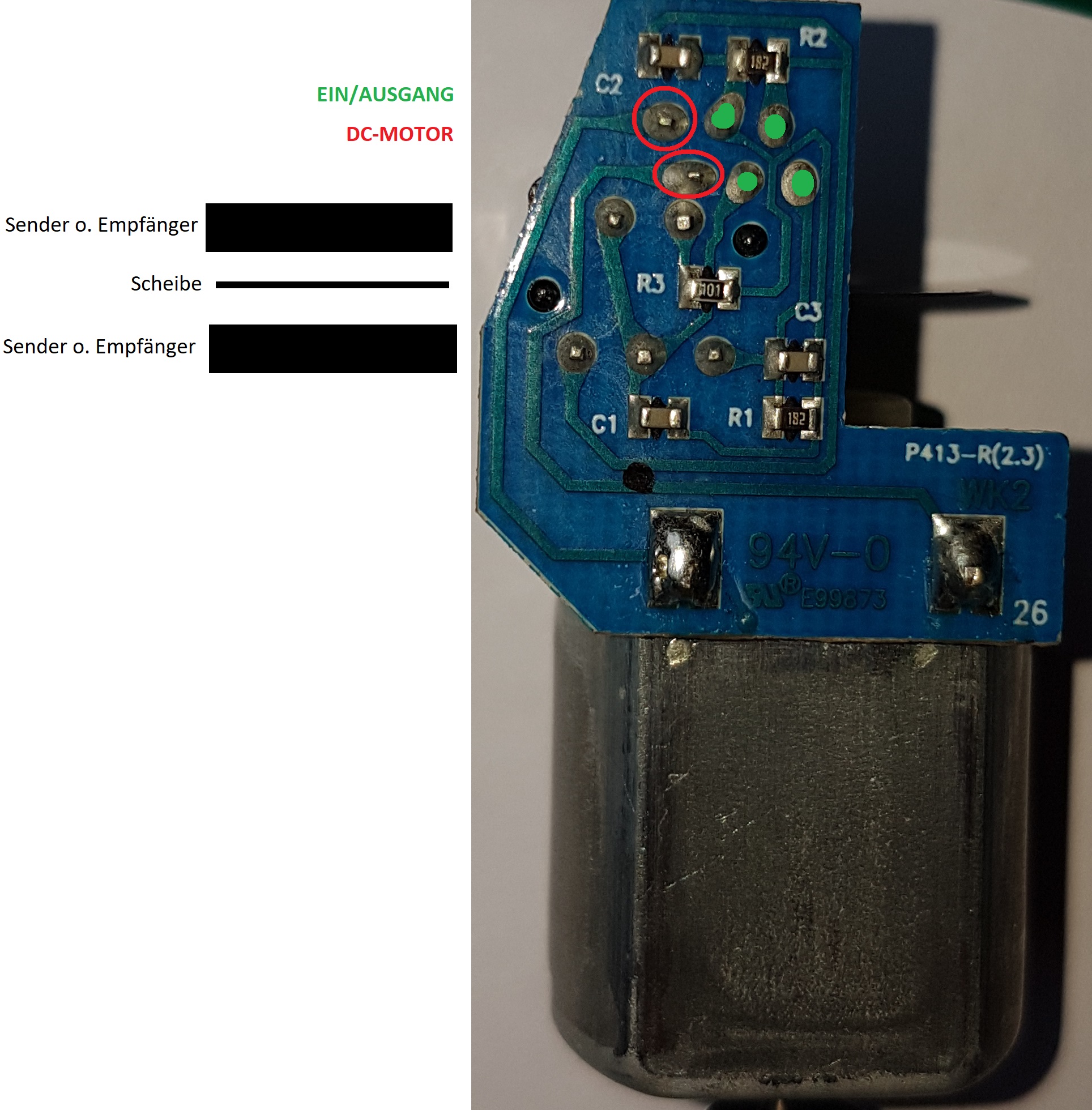
@aSma, was bringen die Pull-Ups? Hast du da einen Link? @alle: Ich habe einen weiteren Sensor aus einem anderen Drucker mit geringerer Strichanzahl (ca. 40), bei der Verkabelung sitze ich aber wieder komplett auf dem Schlauch, diese sieht anders aus (s. Bild) als die des vorherigen Sensors. Könnt ihr mir erneut weiterhelfen? Danke schonmal! LG Simon
Simon N. schrieb: > diese sieht anders aus (s. Bild) als die des > vorherigen Sensors. Das Prinzip ist aber wieder das gleiche. Über R3 (100 Ohm) wird die LED gespeist, damit ergeben sich Versorgung und Masse. Die beiden übrigen Pins am Sensor sind wieder A und B Quadraturausgänge. Hier sind die Pullups übrigens schon vorhanden und auch einige kleine Kondensatoren gegen zu steile Flanken.
Angehängte Dateien:
-

Sensor_3.jpg
240 KB
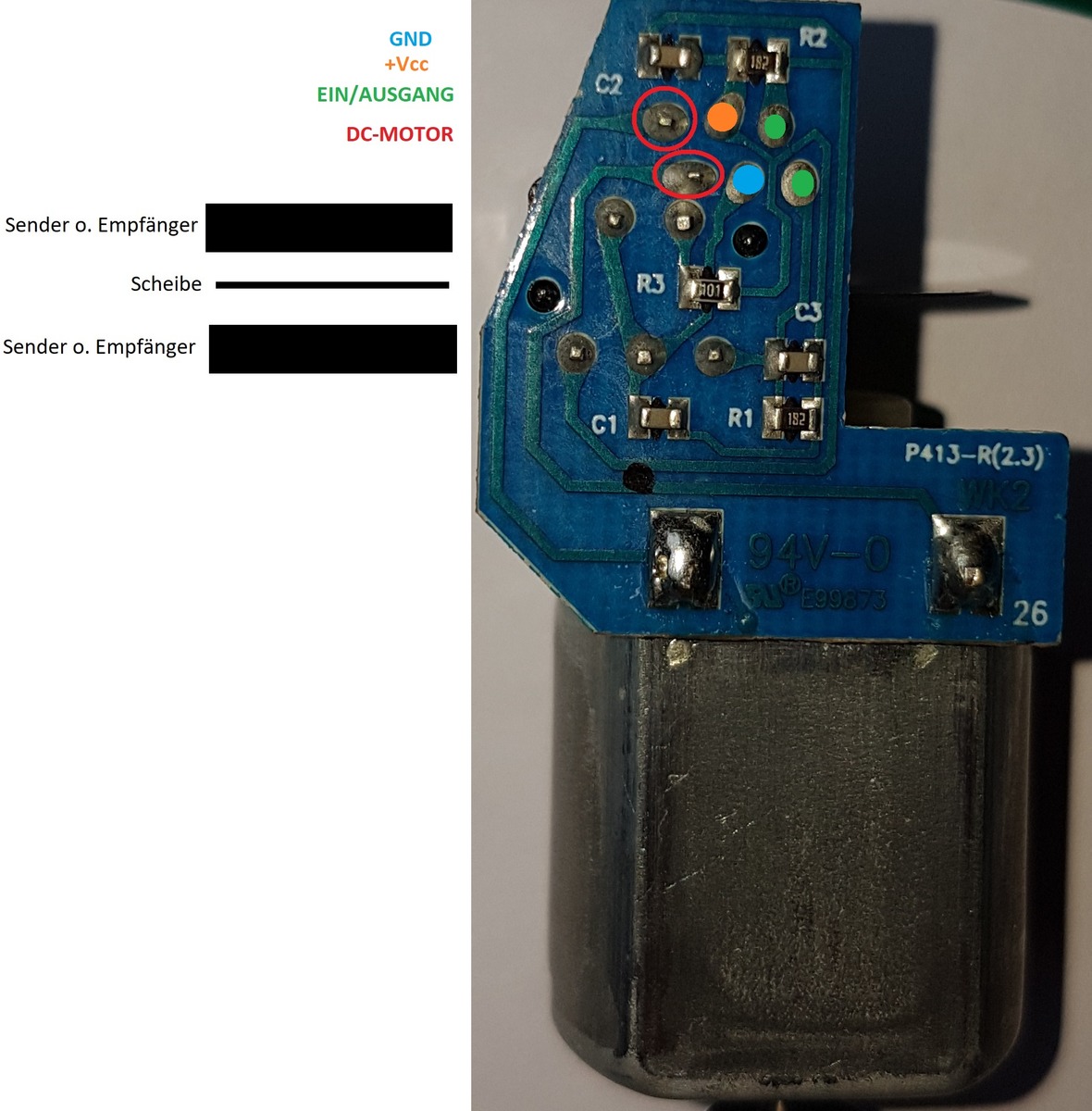
Danke Matthias, so (s. Bild)? Und was hat es mit das mit den Pullups an sich? Was bringen die zusätzlichen? LG Simon
Simon N. schrieb: > Allerdings kann der Arduino die Signale viel zu langsam auswerten... Dann nimm einen anderen Arduino. Der Arduino Due hat für die Auswertung passende Hardware.
Simon N. schrieb: > Und was hat es mit das mit den Pullups an sich? Sie bringen die Leitungen immer auf einen definierten (positiven - pull UP, also gegen 'oben') Pegel. Die meisten Empfänger in solchen Sensoren reagieren auf Licht mit Niederohmigkeit und ziehen damit ihren Ausgang gegen Masse. Der Pullup ist also der Arbeitwiderstand. Gegen die meist schwachen Pullups, die in MC aktiviert werden können, sind die 1,8 kOhm, wie hier benutzt, auch deutlich niedriger und sorgen damit für einen gesunden Arbeitsstrom des Sensors. Bei langen Anschlussleitungen kommt noch die 'Terminierung' ins Spiel. Terminierung bedeutet, das sich auf der Signalleitung keine Reflexion bilden soll, die bei langen Leitungen zu irritierenden Fehlimpulsen führen kann. Dazu fügt man am Ende und am Anfang der Leitung Widerstände ein, die diese Impulse schlucken und idealerweise mit der Leitungsimpedanz übereinstimmen. Das ist jetzt etwas vereinfacht - zugegeben. Aber im Allgemeinen gilt, je niederohmiger eine Leitung betrieben wird, umso unempfindlicher ist sie gegen Störungen. Simon N. schrieb: > Danke Matthias, so (s. Bild)? Alles richtig, nur deine 'Ein/Ausgänge' sind nur Ausgänge, du kannst in den Drehgeber nichts reinschicken.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.