Hallo Leute, für eine kleine Projektarbeit an meiner Uni habe ich den bekannten Versuch einer schwebenden Kugel nachgebaut. Die Kugel schwebt und alles ist super. Nun zu meiner Frage: Ich hätte gerne eine sehr gute Modellbildung meiner Anordnung. Jetzt ist es so, dass normalerweiße eine rein schwebende Kugel eig. eine doppelt-integrierende Strecke ist ohne jegliche Dämpfung und Steifigkeit. In der Literatur wird anstatt des reinen Massenmodells die schwebende Kugel häufig durch eine Feder-Masse-Dämpfer nachgebildet mit einer Federsteifigkeit c und einem Dämpfungskoeffizienten b. Wie bestimme ich aber die notwendige Federsteifigkeit c für mein Modell und viel wichtiger: Wie bestimme ich den Dämpfungskoeffizienten? Weil vergleicht man einmal mein Modell - was ich rein mit einer doppelt integrierenden Strecke aufgebaut habe und mit einem PID-Regler stabilsiert habe, mit der Messung, so sieht man, dass ich wohl in der realen Strecke noch eine Dämpfung habe. Woher kommt diese aber bei einer schwebenden Masse? Besten Dank für eure Hilfen.
Angehängte Dateien:
-

Model.jpg
100 KB
Benjamin N. schrieb: > Woher kommt diese aber bei einer schwebenden Masse? Wie man das berechnet kann ich dir nicht sagen, aber die Federsteifigkeit hängt IMHO auch von der Breite des Lichtstrahles ab (Glühbirne oder Laserstrahl). Oder arbeitest Du mit einem Hallsensor? Schau mal in diesen Thread: Beitrag "Ferromagnetischer Schwebekörper"
:
Bearbeitet durch User
Benjamin Nels schrieb: > so sieht man, dass ich wohl in der >realen Strecke noch eine Dämpfung habe. >Woher kommt diese aber bei einer schwebenden Masse? Vielleicht Luftreibung, wenn die Kugel schaukelt, muß sie ja Luft verdrängen. Das Problem der Stabilität von Regelkreisen, also daß kein Regelschwingen entsteht, taucht immer wieder auf und ist eine Wissenschaft für sich. Ich habe das selbst auch noch nicht so richtig Verstanden. Beispiele sind: Linearspannungsregler, PLL-Regelkreis, sogar bei rein Mechanischen Regelkreisen taucht dieses Problem auf. Ich habe vor längerer Zeit mal beobachtet, wie ein Bauer mit seinen Trecker über eine Riemenscheibe eine Kreissäge zum Brennholzsägen angetrieben hat. Der Trecker muß irgendeine mechanische Drehzahlreglung gehabt haben. Im Leerlauf hat er oszillierend Gas gegeben, erst bei Belastung also beim Sägen wurde die Drehzahl stabil.
Ich würde vermuten, daß die Dämpung fast immer von der Induktivität der Spule kommt die man vieleicht nicht beachtet hat, oder von Wirbelströmen in ferromagnetischen Teilen. Wie wird denn die Position der Kugel erfasst, Lichtschranke oder Hallsensor ? (Ich frage mich sowieso, wie das mit einem Hallsensor gehen soll, der misst ja erst mal nur das von der Spule erzeugte Feld und nicht die Positionm die Position ist ja nur sehr indirekt davon abhängig, selbst wenn die Kugel ein schwebender Magnet sein sollte).
Michael B. schrieb: > (Ich frage mich sowieso, wie das mit einem Hallsensor gehen soll, der > misst ja erst mal nur das von der Spule erzeugte Feld und nicht die > Positionm die Position ist ja nur sehr indirekt davon abhängig, selbst > wenn die Kugel ein schwebender Magnet sein sollte). Jepp, das ist eine interessante Frage.
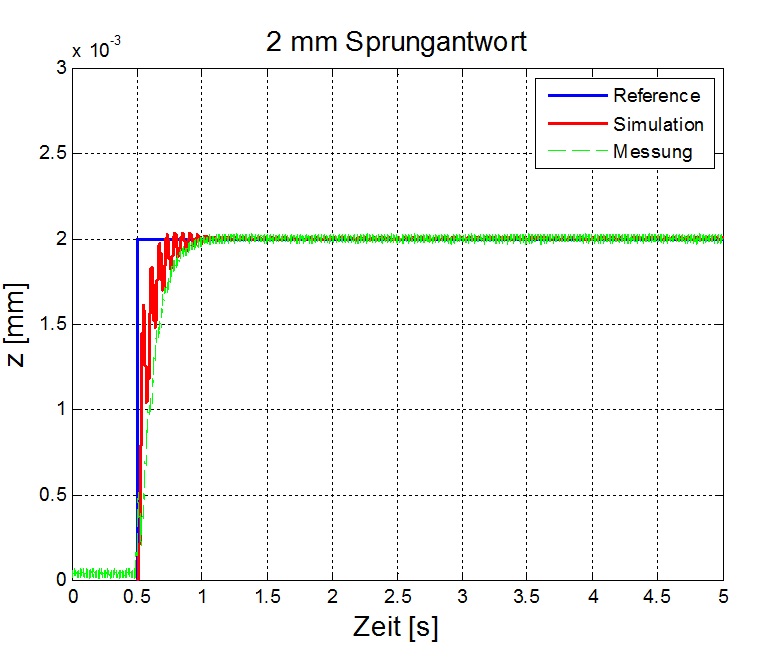
Zu deinem Diagramm: Entweder in [m] und 10^-3 dazuschreiben, oder in [mm] und ohne 10^-3 Beides gleichzeitig ist falsch, dann wärs ja ein 2um Sprung
Günter Lenz schrieb: > Der > Trecker muß irgendeine mechanische Drehzahlreglung gehabt > haben. Im Leerlauf hat er oszillierend Gas gegeben, > erst bei Belastung also beim Sägen wurde die Drehzahl > stabil. In alten Einspritzpumpen steckt ein einfacher Fliehkraftregler. Wenn der nicht sauber eingestellt, ausgeleiert oder nicht hinreichend gewartet (manche muss man gelegentlich abschmieren) wurde, dann regelt der nicht mehr so wie er eigentlich sollte.
Typ schrieb: > Zu deinem Diagramm: Entweder in [m] und 10^-3 dazuschreiben, oder in > [mm] und ohne 10^-3 Die Beschriftung "[mm]" ist soetwas historisch und jenseits von irgendwelchen gültigen Normen. Für eine aktuelle Projektarbeit in der Uni ist die Schreibweise absolut unpassend. Die aktuell gültige DIN 1313 sagt im Abschnitt 4.3 sinngemäß: "Keinesfalls darf das Einheitenzeichen in eckige Klammern gesetzt werden" s.a. https://de.wikipedia.org/wiki/DIN_461#Quantitative_Darstellung https://de.wikipedia.org/wiki/Physikalische_Gr%C3%B6%C3%9Fe#Formel-_und_Einheitenzeichen Das Formelzeichen "[..]" ist für "Einheit von" reserviert, z.B. "[I] = A". Das Einheitenzeichen findet seinen Platz an der Achse zwischen letzter und vorletzter Zahlenangabe als "mm" - und gut ist.
> Die Beschriftung "[mm]" ist soetwas historisch und ...
"Eckige Klammern gehören ins Museum."
Dieserart sprach mein Physik-Prof. (ca. 1980). ;-)
Wolfgang schrieb: > Das Einheitenzeichen findet seinen Platz an der Achse zwischen letzter > und vorletzter Zahlenangabe als "mm" - und gut ist. p.s. Falls das Graphikprogramm dazu absolut nicht in der Lage ist, kann man die Einheit in der Achsenbeschriftung unterbringen. Wenn also ein Strich an der Achse bei z.B. z = 2 mm liegt, kann man die Gleichung umstellen und auf der Achse die reinen Zahlenwerte darstellen/anschreiben. Als Achsenbeschriftung steht dann folglich "z / mm" bzw. entsprechend bei der Ordinate "Zeit / s", wobei es ziemlich inkonsequent ist, an der einen Achse das Formelzeichen und an der anderen eine textliche Beschreibung zu benutzen.
Falls Du den Spulenstrom änderst, veränderst Du die Kraft auf die kugel. Mit f = m * a hast Du die Beschleunigung. Zweimalige Integration den Ort. Jetzt hast Du schon 180 Grad Phasendrehung und in der OK muss Du zwischen -1 und 0 durchfahren. Das auch mit der Phasendrehung der Spule. (kann vermieden werden indem L mit einer Stromquellenschaltung angesteuert wird)
Benjamin N. schrieb: > Wie bestimme ich aber die notwendige Federsteifigkeit c für mein Modell > und viel wichtiger: > > Wie bestimme ich den Dämpfungskoeffizienten? Das Feder-Masse-System wird mit dem geschlossenen Regelkreis verglichen. (siehe Kapitel 2.3 und 2.4 des angehängten PDF - Dokuments) Michael B. schrieb: > (Ich frage mich sowieso, wie das mit einem Hallsensor gehen soll, der > misst ja erst mal nur das von der Spule erzeugte Feld und nicht die > Positionm die Position ist ja nur sehr indirekt davon abhängig, selbst > wenn die Kugel ein schwebender Magnet sein sollte). Die Lichtschranke misst in erster Linie ja auch nur eine Helligkeitsänderung und keine Position. Die magnetische Feldstärke an dem Ort (Sollwert) wird entweder berechnet oder einfach experimentell ermittelt.
R. M. schrieb: > Michael B. schrieb: >> (Ich frage mich sowieso, wie das mit einem Hallsensor gehen soll, der >> misst ja erst mal nur das von der Spule erzeugte Feld und nicht die >> Positionm die Position ist ja nur sehr indirekt davon abhängig, selbst >> wenn die Kugel ein schwebender Magnet sein sollte). > > Die Lichtschranke misst in erster Linie ja auch nur eine > Helligkeitsänderung und keine Position. > Die magnetische Feldstärke an dem Ort (Sollwert) wird entweder > berechnet oder einfach experimentell ermittelt. Ein Hall-Sensor wird oben auf die Spule aufgebracht, ein weiterer unten an der Spule. Die Kugel muss in diesem Fall magnetisch sein. Jetzt zieht man die Werte beider Hall-Sensoren voneinander ab und schon hat man das von der Spule erzeugte Feld herausgerechnet und bekommt einen Wert proportional zur Entfernung der magnetischen Kugel von der Spule. Werner
Lichtscranke 1) Mit Solarzelle gut realisierbar. Verwende eine einfache Solarzelle und kein Modul (da nicht beleuchtete Zellen in Serie vorhanden sind) z.B. Bestell-Nr.: 191267 - 62 von Conrad 2) Keinen Transimpedanz Verstärker, da dieser durch die große C der Solarzelle schwingt. Einfach R parallel zur Zelle und das Verstärken. 3) Als Lichtquelle eignet sich eine Glühbirne mit Linse. Die Kugel soll einen schönen Schatten auf die Solarzelle werfen. 4) Falls Du einen fertigen PID Regler verwendest, drehe I immer auf 0, da es sonst schwingt. 5) In "Powerprojekte mit Arduino und C" ist eine gute Beschhreibung. Auch findet man da den PD Regler in C.
@ Benjamin Nels (ml6) Einen Regelungstechniker interessiert nur die Zeitkonstanten und die Kreisverstärkung. Im Paper "SchwebendeKugel.pdf" muss die Formel: mx^2 = kx+x + ki*i nur noch Laplacetransformiert werden. Der nächste Schritt wäre eine Sprungantwort um kx und ki zu bestimmen. Am besten einfach einen Federkraftmesser an die Kugel kleben. Ist kein Hexenwerk.
aSma>> schrieb: > @ Benjamin Nels (ml6) > > Einen Regelungstechniker interessiert nur die Zeitkonstanten und die > Kreisverstärkung. > > Im Paper "SchwebendeKugel.pdf" muss die Formel: > mx^2 = kx+x + ki*i nur noch Laplacetransformiert werden. > > Der nächste Schritt wäre eine Sprungantwort um kx und ki zu bestimmen. > Am besten einfach einen Federkraftmesser an die Kugel kleben. > > Ist kein Hexenwerk. Naja, das hötte ich doch gerne etwas genauer. Hier wird über etwas sinnlosem diskutiert, das nicht zur Debatte stand (mm Angabe in Klammern oder nicht etc.) ---> Lächerlich! Mir ist einfach nicht klar, wie ich die Dämpfung einer schwebenden Masse bestimmen soll.
<< Mir ist einfach nicht klar, wie ich die Dämpfung einer schwebenden
Masse
<< bestimmen soll.
Indem vom PD-Regler die Faktoren für P und D festgelegt werden.
Nicht getesteter Code:
loop()
{
Data = analogeinlesen (0); //Kugelposition an Port 0 einlesen
D= 33 * Data; // 33 und 44 bestimmen Dämpfung und
P= 44 * (Data - OldData); // Frequenz und hängen vom Modell ab
DA = P + D + 123; //Spulenstrom ausgeben.
//123 kann als Dauermagnet betrachtet werden
//123 ist somit der Abstand Kugel - Magnet
//entweder Proz. mit DA Wandler oder Pwm
OldData = Data; //Daten Rückspeichern, in der nächsten
//Runde der Schleife ist Data der Alte
delay(1); //Falls delay zu kurz wird nur Rauschen ausgewertet
//Falls delay zu lang, faellt die Kugel
}
Benjamin N. schrieb: > Mir ist einfach nicht klar, wie ich die Dämpfung einer schwebenden Masse > bestimmen soll. Man muss eine Streckenidentifikation durchführen. Man erhält ja zunächst folgende Strecke: G(s) = dx/di = Ks/(1-(sT1)^2) Laut den Paper sollte man den PD Regler nehmen, wie sooft bei instabilen Strecken. Den Regler erstellt man entweder nach der Wurzelortskurven Verfahren (WOK) oder eben durch Koeffitientenvergleich einer PT2 Strecke. Gs = Ks1/(s^2*T^2 + 2*d*T*s + 1) mit T = omega Das erste Verfahren ist einfacher. Man kann bei Matlab einfach die Polstellen vorgeben und somit die Dämpfung! Beim zweiten Verfahren wird es ein wenig mathematischer. Man muss hier eine Annahme treffen für Tv>0 und mittels Koeffitientenvegleich, kann man die Dämpfung durch Ändern von Kp bestimmen. Ist alles nicht so trivial aber mathematisch gesehen ein super Schmaus.
Hallo, die Simulationsergebnis sieht so aus, als ob du die Massenträgheit der Kugel vernachlässigt hast. Kann das sein? Daß die Kugel in solcher Anordnung mit ca. 10 Hz flattert, würde würde mir auch unrealitisch erscheinen. Gruß Öletronika
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.