Hallo Wir haben ein Projekt und müssen es bis Montag fertig machen.Bitte hilft uns.Wir müssen einen Sharp GP2d02 mit STM32F303 programmieren.Wir haben es fast fertig aber haben immer noch probleme.Das Program funtioniert zur Zeit nur bei einem bestimmten Distanz.Bitte Bitte helft uns
Ramazan T. schrieb: > Wir müssen einen Sharp GP2d02 mit STM32F303 programmieren.Wir haben > es fast fertig aber haben immer noch probleme.Das Program funtioniert > zur Zeit nur bei einem bestimmten Distanz. Soll das eine Infrarotfernsteuerung werden oder was? Wie soll man denn jemandem helfen, der nicht einmal genau sagt bei was er Hilfe benötigt?
GP2D02 ist ein Infarotsensor.Wir sollen es mit STM32 programmieren.Also je nach Abstand sollen wir einen Tonintervall ausgeben lassen und gleichzeit einen LED mittels PWM ansteuern.
Angehängte Dateien:
-

mikro.JPG
71 KB -

mikro2.JPG
110 KB -

mikro4.JPG
89 KB
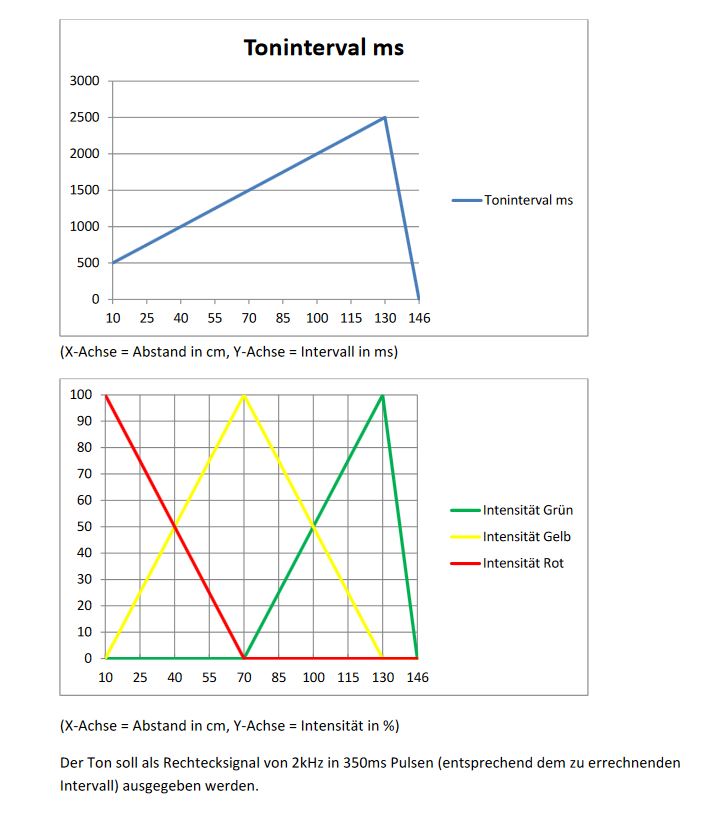


Aufgabenstellung Es soll Abstandswarner mit Multicolor Warnlicht und Tonausgabe entwickelt werden. Dabei gelten folgende Beziehungen zwischen Farbgebung/Toninterval Habe Bilder hochgelanden
Was genau erwartest du jetzt von uns? 1. Dass wir dir eine komplette Lösung geben? 2. Dass wir die ersten Punkte implementieren? 3. Dass wir dir sagen dass du deine Hausaufgaben selbst machen sollst? 4. Dass wir dir jede Information einzeln aus der Nase ziehen sollen um zu erfahren wo genau das Problem liegt?
Ok, jetzt hast du die Aufgabenstellung geschildert und man weiß um was es geht aber wo genau es jetzt hängt, das hast du nicht verraten.
Das Problem ist ,z.B steht im array 0101000 (also 80 in dezimal),aber laut Datenblatt müsste ich dafür etwa 100-120cm entfernt sein,ich habe aber genau davor gesessen.Also die Auswertung ist leider falsch.
Das ist unser Code #include "stm32f3xx.h" //T=0.5ms; ein Impuls=350*T Impulsfunktion=500+16,66*x(=abstand)~500+17*x //Sensor Enfernung~1500/X, X=Augabewert des Sensors //LEDS an Pins A15, B4 und B6; SharpIn an Pin C1 SharpOut an Pin F0, Trigger fürs messen ist Pin A1 //Funktion für LED 10|70|130+-1,66*abstand~10|70|130+-2*abstand; Lautstrecher an Pin A0 //Sensor im interrtupt: laufvariable, die bei unter 70ms den pin auf low,bei 70 ms anfängt zu toggeln und nach 71,6ms Pin auf high setzt //Probleme: Ansteuerung fehlerhaft | Zusatzaufgaben? int abstand=65; //licht int anfang=0; int entfernung=0; int timer=0; char Sharp[8]; int test=70; //zurzeit die entferung in cm für ton int tonzahl=0; int zusatz=0; void delay(void); void ArrayLeer(void){ for(int i=0;i<7;i++){ Sharp[i]=0; } } void zahlLesen(void){ for(int i=8;i>1;i--){ entfernung+=(2^i)*Sharp[i-1]; //konvertierung von binär zu dezimal } } void licht(int *zahl){ if(*zahl<11){ TIM3->CCR1 = 60; GPIOB->ODR |= GPIO_ODR_4; } else if(*zahl>10 && *zahl<71){ TIM3->CCR1 = (70-*zahl); TIM4->CCR1 = (*zahl-11); TIM2->CCR1 = 0; }else if(*zahl>70 && *zahl<131){ TIM3->CCR1= 0; TIM4->CCR1 = 130-(*zahl); TIM2->CCR1 = (*zahl-70); } else if (*zahl>130){ TIM3->CCR1 = 0; TIM4->CCR1 = 0; TIM2->CCR1 = 60; } } void sensor(int *zeit){ if(*zeit<1){ GPIOC->ODR |= GPIO_ODR_1; } else if(*zeit<1400 && *zeit>0){ GPIOC->ODR &= ~(GPIO_ODR_1); } else if (*zeit>1400){ switch(*zeit){ case 1401: case 1405: case 1409: case 1413: case 1417: case 1421: case 1425: case 1429: GPIOC->ODR |= GPIO_ODR_1; break; default : GPIOC->ODR &= ~(GPIO_ODR_1); }} else if(*zeit>1430 &&*zeit<1450){ GPIOC->ODR |= GPIO_ODR_1; } else if(*zeit>1500){ *zeit=0; } } void ton(int *der, int *die){ //abstand, tonzahl if(*die<(850+ *der+ *der+ *der+ *der+ *der+ *der+ *der+ *der+ *der+ *der + *der+ *der+ *der+ *der+ *der+ *der+ *der)){ GPIOA->ODR ^= GPIO_ODR_0; //toggeln für den Lautsprecher } else { *die=0; } } int main(void) { RCC->AHBENR |= RCC_AHBENR_GPIOAEN; RCC->AHBENR |= RCC_AHBENR_GPIOBEN; RCC->AHBENR |= RCC_AHBENR_GPIOCEN; RCC->AHBENR |= RCC_AHBENR_GPIOFEN; GPIOC->MODER |= GPIO_MODER_MODER2_0; GPIOA->MODER |= GPIO_MODER_MODER0_0; GPIOA->MODER |= GPIO_MODER_MODER15_1; GPIOB->MODER |= GPIO_MODER_MODER4_1; GPIOA->MODER |= GPIO_MODER_MODER6_1; GPIOB->MODER |= GPIO_MODER_MODER6_1; GPIOC->MODER |= GPIO_MODER_MODER1_0; GPIOF->PUPDR |= (1 << 3); //PF1 ist down GPIOF->PUPDR |= 0b1; //PF0 ist pulldown GPIOC->ODR |= GPIO_ODR_1; //zum ansteuern braucht es ein kurzes high SYSCFG->EXTICR[0] = 0; // PA1 an EXTI1 EXTI->IMR |= EXTI_IMR_MR1; // EXTI1 freigeben EXTI->RTSR |= EXTI_RTSR_TR1; // EXTI1: steigende Flanke GPIOA->PUPDR |= (1 << 3); // Pull-Down fuer PA1 NVIC_EnableIRQ(EXTI1_IRQn); RCC->APB1ENR |= RCC_APB1ENR_TIM2EN; GPIOA->AFR[1] |= (1<<28) ; //Pin A15 als alternative Funktion 1 TIM2->CCMR1 |= (11<<5); //PWM mode 1 TIM2->CCER = TIM_CCER_CC1E; //Compare modus TIM2->PSC = 99; TIM2->ARR = 60; // 0.75ms @ 8Mhz TIM2->CR1 = TIM_CR1_CEN; RCC->APB1ENR |= RCC_APB1ENR_TIM4EN; GPIOB->AFR[0] |= (1<<25) ; //Pin B6 als alternative Funktion 2 TIM4->CCMR1 |= (11<<5); //PWM mode 1 TIM4->CCER = TIM_CCER_CC1E; //Compare modus TIM4->PSC = 99; TIM4->ARR = 39; // 0.5ms @ 8Mhz TIM4->CR1 = TIM_CR1_CEN; RCC->APB1ENR |= RCC_APB1ENR_TIM3EN; GPIOB->AFR[0] |= (1<<17) ; //Pin B4 als alternative Funktion 2 GPIOA->AFR[0] |= (1<<25) ; //Pin A6 als alternative Funktion 2 GPIOC->AFR[0] |= (1<<25) ; //Pin C6 als alternative Funktion 2 TIM3->CCMR1 |= (11<<5); //PWM mode 1 TIM3->CCER = TIM_CCER_CC1E; //Compare modus TIM3->PSC = 99; TIM3->ARR = 60; // 0.75ms @ 8Mhz TIM3->CR1 = TIM_CR1_CEN; RCC->APB2ENR |= RCC_APB2ENR_TIM16EN; TIM16->DIER = TIM_DIER_UIE; // Update-Interrupt ein TIM16->PSC = 99; TIM16->ARR = 3; // 0,05ms @ 8 MHz TIM16->CR1 = TIM_CR1_CEN; // Timer ein NVIC_EnableIRQ(TIM1_UP_TIM16_IRQn); RCC->APB2ENR |= RCC_APB2ENR_TIM17EN; TIM17->DIER = TIM_DIER_UIE; // Update-Interrupt ein TIM17->PSC = 7999; TIM17->ARR = 249; // 0,25 s @ 8 MHz TIM17->CR1 = TIM_CR1_CEN; // Timer ein NVIC_EnableIRQ(TIM1_TRG_COM_TIM17_IRQn); GPIOC->ODR &= ~(GPIO_ODR_1); //zum ansteuern des sensors wird nach dem start high ein low für min 70ms gebraucht delay(); while(1){ licht(&abstand); // sensor(&timer); zahlLesen(); ton(&abstand, &tonzahl); //ton(&entfernung, &tonzahl); if(timer<1){ GPIOC->ODR |= GPIO_ODR_2; }else if (timer>1 && timer<3){ GPIOC->ODR &= ~(GPIO_ODR_2); } if (timer>1500) timer=0; __WFI(); } return 1; } void TIM16_IRQHandler(void) { if(timer<1400){ GPIOC->ODR &= ~(GPIO_ODR_1); }else if(timer>1400 && timer <1418){ GPIOC->ODR ^= GPIO_ODR_1; }else if(timer>1455){ GPIOC->ODR |= GPIO_ODR_1; } tonzahl++; timer++; if (tonzahl>100000){tonzahl=0;} TIM16->SR &= ~TIM_SR_UIF; } void TIM17_IRQHandler(void) { abstand++; // abstand inkrementieren TIM17->SR &= ~TIM_SR_UIF; } void EXTI1_IRQHandler(void){ if(zusatz>8){ zusatz=0; entfernung=0; ArrayLeer(); } Sharp[zusatz]=GPIOF->IDR; zusatz++; EXTI->PR = EXTI_PR_PR1; //trigger flag gelöscht } void delay(){ //while(1){ if(timer>160){ timer=0; //tonzahl=0; //abstand=0; // break; // } } }
Ohje, da weiß man garnicht wo man anfangen soll. Mal ein paar Tips: 1. Längeren Code im Forum in den Anhang packen und wenn schon dann in [ c ] statt in [ code ] tags packen. 2. Code vernünftig einrücken 3. Code nach Themen gruppieren, z.B. eine Funktion gpio_init() und eine Funktion timer_init() 4. Magische Zahlen vermeiden , also so etwas wie XYZ->ABC = 0x42; 5. Mit Aufgabe Nr.9 Anfangen 6. WTF? Ramazan T. schrieb: > void ton(int *der, int *die){ //abstand, tonzahl > if(*die<(850+ *der+ *der+ *der+ *der+ *der+ *der+ *der+ *der+ *der+ > *der + *der+ *der+ *der+ *der+ *der+ *der+ *der))
Code habe ich jetzt als Anhang angehängt.Ja ich fange dann mal mit Aufgabe 9 an , hatte aber leider bissher kein Programmablaufplan erstellt.Also weiss ich leider nicht wie es geht bzw. nicht bei solchen komplizierten Programmcode
Kann mir bitte jemand weiter helfen.Ich kriege diesen Programmablaufplan einfach nicht hin.Habe es bei so ein großen Programmcode nicht gemacht bzw.einen Code zur Ansteuerung von Mikrocontrollern.
Ramazan T. schrieb: > steht im array 0101000 (also 80 in dezimal) Da geht es schon los: 0101000 -> 0x28 -> 40 Ramazan T. schrieb: > Bitte Bitte helft uns Ramazan T. schrieb: > weiss ich leider nicht wie es geht Ramazan T. schrieb: > Kann mir bitte jemand weiter helfen Sieh es einfach ein: Nicht jeder ist für jede Aufgabe geeignet.
Da ist viel zu viel hardcodierter Unsinn drin, und irgendwie habt ihr missverstanden, wie der Sharp nun sein Datum ausgibt. 1. VIn wird auf low gelegt, um den Messvorgang zu starten. 2. Nach etwa 70ms hebt Sharp Vout auf high, um das Ende der Messung anzuzeigen. 3.Nun wird VIn für höchstens 200µs gepulst, und mit ingesamt 8 Pulsen auf der steigenden Flanke das Datum auf VOut eingelesen , MSB zuerst. 4.Der letzte Puls fürs LSB auf VIn ist länger als 1500µs, Sharp antwortet daraufhin noch mal mit einem positiven Puls. Weitere kurze 200µs Pulse auf Vin geben wiederholt das LSB aus. 5.Wenn man nun VIn auf high lässt, geht der Sensor wieder ins Powerdown. Hier ein kurzes AVR-ASM Routinchen dafür:
1 | ; make a single measurement |
2 | measure: |
3 | cbi PORTB,Vin ; start sensor |
4 | ldi del,w70msec ; wait 70ms |
5 | rcall wozwait |
6 | measa: sbis PINB,Vout ; wait for a high |
7 | rjmp measa |
8 | sbi PORTB,Vin ; raise VIn |
9 | rcall w100 ; wait 100µs |
10 | cbi PORTB,Vin ; lower it again |
11 | clr result ; zero out result |
12 | ldi counter,8 ; 8 bits to receive |
13 | measb: rcall w100 |
14 | sbic PINB,Vout ; read the data |
15 | ori result,0x01 ; shift a 1 into the result |
16 | lsl result |
17 | sbi PORTB,Vin ; |
18 | rcall w100 |
19 | cbi PORTB,Vin |
20 | dec counter |
21 | brne measb |
22 | rcall w100 |
23 | sbi PORTB,Vin |
24 | ret |
Matthias S. schrieb: > Hier ein kurzes AVR-ASM Routinchen dafür: In meiner Glaskugel sehe ich ein paar Köpfe explodieren ;)
pegel schrieb: > In meiner Glaskugel sehe ich ein paar Köpfe explodieren ;) Wird schon passiert sein, da die Jungs ja heute ihr Projekt abgeben mussten, was ihnen ja verdammt früh eingefallen ist. Tja, in C hatte ichs gerade nicht da...
Habe es schon hinbekommen ohne eure Hilfe hier.Sry aber es gibt hier echt arrogante Leute die denken die wären was besseres.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.