Hallo liebe Forum! Ich weiß wieder nicht weiter! Was mache ich den falsch? Die Eigenbau-Test-Schaltung liefert (einstellbare) 1...2ms Rechteckimpuls und eine feste Pause von ca. 18ms. Das sollte den Ansteuerungsbedürfnissen von einem standarten Servo-Motor entsprechen, tut es aber nicht: ein Servo geht damit zwischen ca. -10° und +80°. Also viel zu kleine Gang. Habe 2 unterschiedliche Servo getestet (SG90 und S36 JST (von Pollin) -> gleiches Verhalten. Ich hatte Impulslänge von 0,6ms bis 2,4ms einstellbar gemacht -> gleiches verhalten, nur etwas winkelmässig verschoben. Wieso gehen die nicht von -90° bis +90°, was mache ich falsch?
Angehängte Dateien:
-

Schaltung_01.png
16 KB
Johann R. schrieb: > Habe 2 unterschiedliche Servo getestet (SG90 und S36 JST (von Pollin) -> > gleiches Verhalten. Streu das mal etwas weiter mit anderen Servos und probiere die Servos auch mal an einer andeen Quelle, wenn vorhanden. Meine Graupners laufen mit Pulsen von 1ms - 2ms von -90° bis 90°.
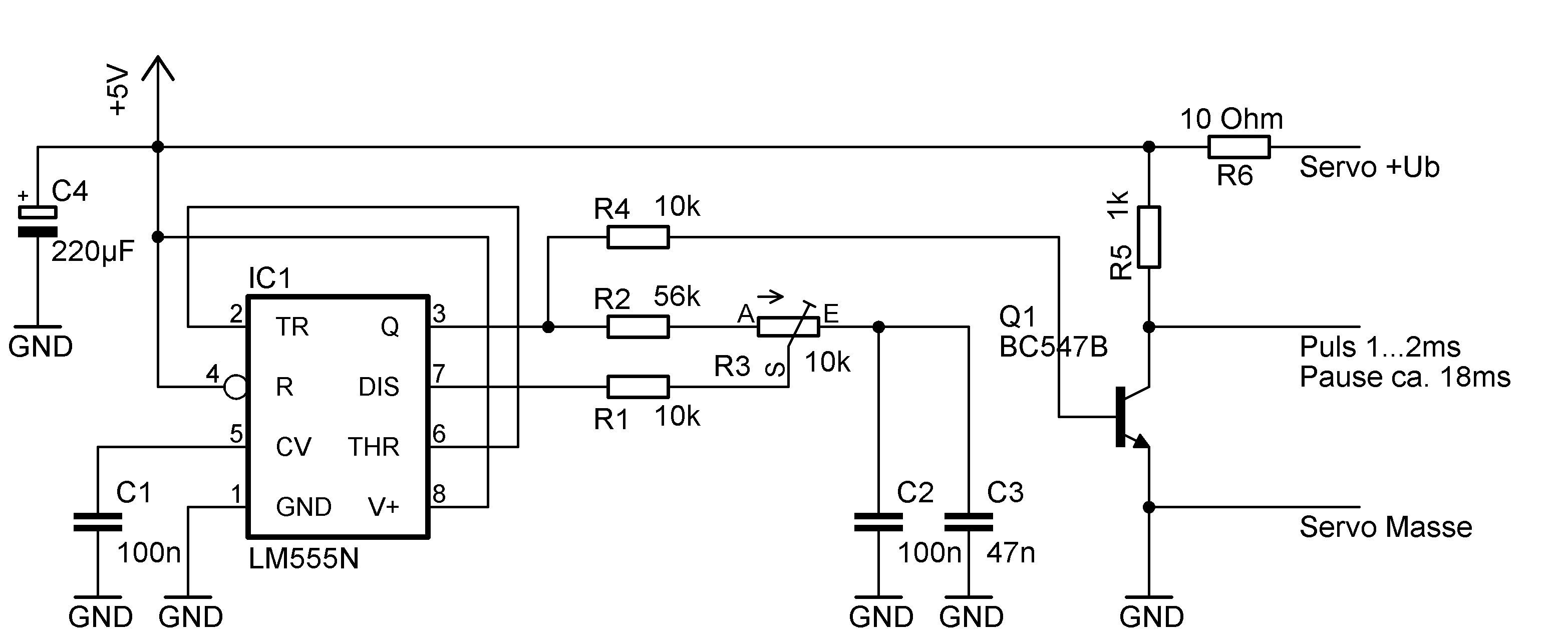
Dein Schaltplan kann unmöglich stimmen, Threshold und Trigger sind nicht mit irgendeinem Signal verbunden, und Q und Discharge werden merkwürdig parallel verwendet.
Angehängte Dateien:
-

Schaltung_02.png
16 KB

hinz schrieb: > Dein Schaltplan kann unmöglich stimmen, Threshold und Trigger sind nicht > mit irgendeinem Signal verbunden, und Q und Discharge werden merkwürdig > parallel verwendet. Entschuldigung, zu eilig gewesenmit der Schaltung-Zeichnen. Threshold und Trigger sind mit C2+C3 verbunden. Während Pause am Ausgang Wird C2+C3 über R1 und Poti geladen. Während Impulses entladen sich C2+C3 über R1/Poti und über R2/Poti. Habe mit Oszi gemessen, Impuls 1...2ms und Periode ca.20ms.
Matthias S. schrieb: > Streu das mal etwas weiter mit anderen Servos und probiere die Servos > auch mal an einer andeen Quelle, wenn vorhanden. Meine Graupners laufen > mit Pulsen von 1ms - 2ms von -90° bis 90°. Habe gerade mit 2 Quellen versucht, eine für Servo, andere für die Schaltung -> -45° bis +45°. Was meinst du mit "Streuen"? Parallel anschließen?
Matthias S. schrieb: > Meine Graupners laufen > mit Pulsen von 1ms - 2ms von -90° bis 90°. Wirklich? Wäre eigentlich unüblich - wie soll das denn mit der üblichen Gestänge-Anlenkung funktionieren? Die Servos, die ich so kenne, gehen alle nur ca. +/- 45°. 180 Grad (+/- 90°) als voller Weg ist schon eine Spezialanwendung, und dazu braucht es auch spezielle Servos. Also: für mich sind +/- 45 Grad bei 1..2 ms eigentlich völlig normal!
Thomas E. schrieb: > Also: für mich sind +/- 45 Grad bei 1..2 ms eigentlich völlig normal! Für mich auch, aber: SG90: Servo can rotate approximately 180 degrees (90 in each direction),
Thomas E. schrieb: > und dazu braucht es auch spezielle Servos. Die Graupners wurden von mir dafür gekauft, das sie einen so grossen Winkel durchfahren. Die treiben hier auch keine Gestänge, sondern Zahnräder an einer EB-Kamera. Johann R. schrieb: > Was meinst du mit "Streuen"? Nein, du solltest auch andere Servos ausprobieren neben den beiden Pollin Dingern.
Angehängte Dateien:
-

Schaltung_03.png
16 KB

Matthias S. schrieb: > Nein, du solltest auch andere Servos ausprobieren neben den beiden > Pollin Dingern. Kann ich nicht! Da sind nur die Beide... meine erste beide. von Pollin ist nur S36. Aber sie rotieren jetzt gut: ich habe die Schaltung neu angepasst und R6 weggelassen und Zeit etwas ausgedehnt (ca. 0,8 bis 2,1ms) - läuft jetzt alles. Das hatte wahrscheinlich mit Elektronik im Servo zutun gehabt. Wenn diese kurzen Impulsantwort von Motor jedesmal auswertet, dann erwartet es keine resistive Anteile wahrscheinlich. Hier ist die Schaltung nochmal. Spule ist nur dargestellt, damit da kein Widerstand da ist.
Johann R. schrieb: > Wenn > diese kurzen Impulsantwort von Motor jedesmal auswertet, dann erwartet > es keine resistive Anteile wahrscheinlich ???
Ne! Mit R6 läuft auch, nur nicht so schnell und kraftvoll. Also müsste nur die Zeit ausgedehnt werden.
Matthias S. schrieb: > Johann R. schrieb: >> Wenn >> diese kurzen Impulsantwort von Motor jedesmal auswertet, dann erwartet >> es keine resistive Anteile wahrscheinlich > > ??? Entschuldigung, ich habe bei S36 reingeschaut als es von alleine zerfiel, da schoßen die Gedanken aber -> Controller drine, der seine Aufgaben nicht 100%-ig erfüllt, so wie es aussieht. Eigentlich sollte er sich nicht gestört füllen von Motor-Rückstoßimpulsen. Wie auch immer, beim Einsatz von Servo - Vorwiderstand weglassen! Und S36 vor dem Einsatz zerlegen, mit Kleber versehen und wieder zusammensetzen! :-)
chris schrieb: > servo braucht 0.5-2.5ms für 180 Grad, 1-2ms bleiben immer 90 Grad > (+-45). Gut zu wissen! Danke!
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.