Hallo zusammen! Ich bin elektronik Einsteiger und benötige Hilfe für mein aktuelles Projekt. Ich versuche gerade einen TV Lift zu bauen. Hierzu habe ich zwei Linearmotoren mit jeweils 80cm Auszug im Morgenland gekauft und eine Motorsteuerung Die Hubsäulen sollten jeweils mit 20mm/s ausfahren. Tatsächlich ist eine aber schneller als die andere. 37s zu 39s bis zum Vollauszug. Die Säulen müssen aber synchron laufen. Ich habe mal mit verschiedenen Spannungen experimentiert. Wenn die langsamere Säule mit 12 V läuft und ich die schnellere mit 11,3 Volt betreibe kommen sie gleichzeitig an. Mit welchem Bauteil kann ich die Spannung für einen Linearmotor runterregeln? Ich habe mir einen LM2596 DC-DC adjustable Step-Down-Schaltregler besorgt. Was ich nicht bedacht habe -aufgrund der wechselnden Polarität funktioniert dieser natürlich nur in eine Richtung. Das gleiche Problem mit einer Diode. Aber der TV sollte ja aus- und eingefahren werden... Ich hoffe ich konnte das Problem einigermaßen verständlich erklären und bin sehr dankbar über einen Tip. Hier die bisherigen Bauteile: Linear Aktuatoren: https://de.aliexpress.com/item/Beste-schwere-Linearantrieb-12-V-24-V-800mm-Hub-1500N-last-80-mm-s-geschwindigkeit-antrieb/32839785309.html?spm=a2g0s.9042311.0.0.362udx Motorsteuerung: https://www.ebay.de/itm/DC12-24V-Wireless-Positive-Inversion-Remote-Motorsteuerung-für-Linear-Actuator/371330722501?ssPageName=STRK%3AMEBIDX%3AIT&_trksid=p2057872.m2749.l2649 1 Stück LM2596 DC-DC adjustable Step-Down-Schaltregler with LED-Voltmeter
Koppel die Antriebe mit einem Zahnriemen. Alles andere ist Murks und wird eher früher wie später Klemmen.
@ Axel S. (lernwillig) >Die Hubsäulen sollten jeweils mit 20mm/s ausfahren. Tatsächlich ist eine >aber schneller als die andere. 37s zu 39s bis zum Vollauszug. Die Säulen >müssen aber synchron laufen. Dann muss man sie WIRKLICH synchronisieren. Entweder durch mechanische Kopplung (Zahnriemen, Getriebe) oder elektrisch durch einen Drehgeber auf den Achsen und eine (Schritt)motorsteuerung. >Mit welchem Bauteil kann ich die Spannung für einen Linearmotor >runterregeln? Ich habe mir einen LM2596 DC-DC adjustable >Step-Down-Schaltregler besorgt. Kann man machen. > Was ich nicht bedacht habe -aufgrund der >wechselnden Polarität funktioniert dieser natürlich nur in eine >Richtung. Das reicht doch. Man regelt erst runter und macht DANACH die Polaritätsumschaltung. >>https://de.aliexpress.com/item/Beste-schwere-Linea... Da muss man irgendwie versuchen, einen minimalen Sensor anzubauen, der die Umdrehungen im Getriebe mißt. Man kann es VIELLEICHT auch mit einer einstellbaren Spannung hinfrickeln, aber das ist wahrscheinlich nicht stabil. Das geht ne Weile und wenn ein Motor schwergängiger wird, klemmt es wieder.
Angehängte Dateien:
-

Zwei_Dioden.png
999 Bytes
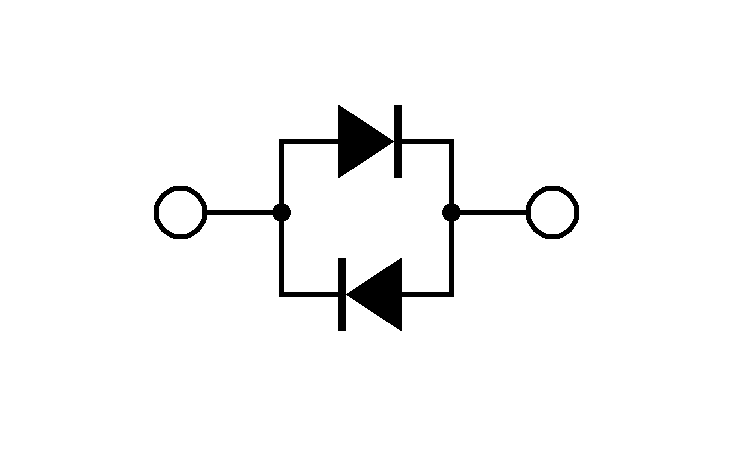
Axel S. schrieb: > Das gleiche Problem mit einer Diode. Nimm 2
Hey Christian, danke für deine schnelle Antwort. Die Idee ist toll. Die Antriebe liegen etwa 1,5m auseinander. Die Zahnräder sind - zumindest für mich - leider unzugänglich. Ich fürchte da reicht leider mein Know-How nicht aus. Gibt es andere - zur Not "Murks" Ideen?
Man könnte versuchen, beide Motoren mit konstantem Strom statt konstanter Spannung zu betreiben. Das könnte dem Gleichlauf entgegen kommen. Deutlich aufwändiger und nix für "Maker" wäre eine sensorlose Drehzahlmessung über den schwankenden Motorstrom (mechanischer Kommutator). Das wäre allerdings im Endeffekt stabiler.
Oder aber einfach andere Antriebe besorgen, welche mit Schrittmotoren und Pulsen angesteuert werden. Dann geht es ohne Nacharbeiten. https://de.aliexpress.com/item/42mm-Linear-stepping-Motor-Screw-Stepper-Motor/32281133710.html?spm=a2g0x.search0104.3.194.3a0fc0d6kVSu2x&ws_ab_test=searchweb0_0,searchweb201602_4_10320_10321_10065_10344_10068_10342_10547_10343_10322_10340_10548_10341_10193_10194_10084_10083_10618_10304_10307_10302_5722316_10180_10313_10059_10184_10534_100031_10319_10103_441_10624_442_10623_10622_10186_10621_10620_10142,searchweb201603_25,ppcSwitch_5&algo_expid=c90bc650-a56f-47f4-b2ee-ea0ff34755d6-29&algo_pvid=c90bc650-a56f-47f4-b2ee-ea0ff34755d6&priceBeautifyAB=0 Oder die Mechanik umbauen und nur einen Motor mittig nutzen.
Falk B. schrieb: > Das reicht doch. Man regelt erst runter und macht DANACH die > Polaritätsumschaltung. Erstmal vielen Dank für die Ideen! Die Motorsteuerung steuert beide Motoren. Wenn ich davor runter Regel sind beide Motoren betroffen. Ich vermute die Steuereinheit ist eigentlich nur für einen Motor konzipiert. Er hat auch nur einen Ausgang den ich teile. Falk B. schrieb: > Man könnte versuchen, beide Motoren mit konstantem Strom statt > konstanter Spannung zu betreiben. Das könnte dem Gleichlauf entgegen > kommen. Das Überfordert mich gerade. Wie könnte das Schaltungs- bzw. Bauteiltechnisch aussehen?
@Axel S. (lernwillig) >> Das reicht doch. Man regelt erst runter und macht DANACH die >> Polaritätsumschaltung. >Erstmal vielen Dank für die Ideen! Die Motorsteuerung steuert beide >Motoren. Das kann man ändern. Relais sind einfach und billig. Hmm. Das Ding hat schon sämtliche Logik eingebaut. >die Steuereinheit ist eigentlich nur für einen Motor konzipiert. Er hat >auch nur einen Ausgang den ich teile. Das muss man halt aufbohren. >> Man könnte versuchen, beide Motoren mit konstantem Strom statt >> konstanter Spannung zu betreiben. Das könnte dem Gleichlauf entgegen >> kommen. >Das Überfordert mich gerade. Wie könnte das Schaltungs- bzw. >Bauteiltechnisch aussehen? Man braucht eine Konstantstromquelle. Aber ich bin mir nicht so sicher, ob Konstantstrombetrieb hier wirklich die Lösung ist. Versuchen wir es lieber mit der getrennten Spannungssteuerung. Der Ansatz hier ist einfach und einen Versuch wert. Beitrag "Re: 12V auf 11,2 V reduzieren bei wechselnder Polarität" Damit werden einem Motor polaritätsunabhänig ca. 0,7V geklaut. Wenn das nicht reicht, nimm man nochmal 2 Dioden mehr. Einfach 3A Dioden sind ausreichend. https://www.reichelt.de/1N-UF-AA-Dioden/1N-5400/3/index.html?ACTION=3&LA=2&ARTICLE=1745&GROUPID=2987&artnr=1N+5400&trstct=pol_1
Falk B. schrieb: > Man könnte versuchen, beide Motoren mit konstantem Strom statt > konstanter Spannung zu betreiben. Das könnte dem Gleichlauf entgegen > kommen. Nein, gerade bei Gleichstrommotoren nicht, Spannung = Drehzahl und Kraft = Strom, man will gleiche Drehzahl, braucht also gleiche Spannung. Trotzdem drehen sie nie genau gleich, der Pfusch mit Spannungsreduktion taugt also nicht. Zahnriemen finde ich auch am einfachsten. Synchronisierung der Motoren durch Indeximpuls pro Umdrehung und PLL zur Gleichlauferzwingung übersteigt sicher Axels Fähigkeiten. Da ware ein Schrittmotorantrieb einfacher, aber was machen Portalfräsenbauer die dummerweise 2 Motoren verwendet haben mit den unvermeidlich Schrittfehler (der eine links, der andere rechts) beim Abschalten, die das Portal im Laufe der Zeit schräg verziehen bis es klemmt: Sie nehmen Zahnriemen
Angehängte Dateien:
-

TV-Lift.jpg
240 KB

Falk B. schrieb: > Oder die Mechanik umbauen und nur einen Motor mittig nutzen. Das wäre mir die liebste Lösung. Der Lift wird allerdings in eine 12cm dicke Wand eingebaut. (Wenn der TV unten ist wird's zum Fenster) Der TV ist auf einer Multiplexplatte mit flacher Wandhalterung montiert. Zwei Linearführung sorgen dafür dass er nicht wackelt. Mittig ist einfach kein Platz mehr und eine Säule außen wahrscheinlich zu schwach.
MaWin schrieb: > Sie nehmen Zahnriemen Jetzt mal im ernst. Kann ich diese kleinen "Motor-Tuben" aufmachen und die Zahnräder irgendwie mit einem 1,5 m langen Zahnriemen verbinden? Ich kann mir das gerade speziell mit diesen Linear-Motoren überhaupt nicht vorstellen. Hat hier jemand so ein ding schon mal aufgeschraubt und das gemacht?
@Axel S. (lernwillig) > TV-Lift.jpg >> Oder die Mechanik umbauen und nur einen Motor mittig nutzen. >Das wäre mir die liebste Lösung. Sollte eigentlich leicht machbar sein. Der Motor ist nur 40mm breit. Wenn man den am oberen Rand des TVs angreifen läßt, wie der Nagel bei einem Bild, hat man keine Probleme mit der Statik. Viele TVs (alle) haben ja auch schon Aufhängepunkte und diverse Mechaniken auf der Rückseite. >ist auf einer Multiplexplatte mit flacher Wandhalterung montiert. Das ist zwar einfach, aber wahrscheinlich auch eher dick. Da muss man was anders machen. > Zwei >Linearführung sorgen dafür dass er nicht wackelt. Naja, das kriegt man mit Know How auch mit einer Säule hin. Es gibt ja auch Einarmhalterungen für Motoräder. > Mittig ist einfach >kein Platz mehr Den muss man finden. Z.B. indem man die Trägerplatte halbiert und in der Mitte Platz für den Motor läßt. Du brauchst ja keine Platte, wahrscheinlich reicht ein Querträger aus Vierkant oder L-Profil. > und eine Säule außen wahrscheinlich zu schwach. Dann musst du das Kippmoment abfangen. Das wird häßlich. Rein von der Hubkraft ist es gleich. Das Ding schafft 130kg! Da kannst du 10 Flachbildschirme anheben!
@ Axel S. (lernwillig) >Jetzt mal im ernst. Kann ich diese kleinen "Motor-Tuben" aufmachen und >die Zahnräder irgendwie mit einem 1,5 m langen Zahnriemen verbinden? Nicht wirklich.
Falk B. schrieb: > Beitrag "Re: 12V auf 11,2 V reduzieren bei wechselnder Polarität" > > Damit werden einem Motor polaritätsunabhänig ca. 0,7V geklaut. Wenn das > nicht reicht, nimm man nochmal 2 Dioden mehr. Einfach 3A Dioden sind > ausreichend. > > https://www.reichelt.de/1N-UF-AA-Dioden/1N-5400/3/index.html?ACTION=3&LA=2&ARTICLE=1745&GROUPID=2987&artnr=1N+5400&trstct=pol_1 Danke dir! Das probiere ich auf jeden Fall aus.
Axel S. schrieb: > eine Säule außen wahrscheinlich zu schwach. Ja, vielleicht auch - wenn es sich nicht eh verklemmen würde dann. Um dem Verklemmen entgegenzuwirken, müßte schon eine Führung her - also eine überlange Führungsstange mit zwei gleitenden Fixpunkten. Vergiß es vielleicht lieber ganz (also noch mehr... :), eine außen zu machen. Aber das mit Svens antiparallelen Dioden sieht doch gut aus - man muß nur welche finden, die bei Nennstrom die gewünschten 0,7 (oder waren es 0,8?) Volt Vorwärtsspannung haben. "Über die Zeit aufschaukeln" kann sich dabei ja nichts - es sind ja Endschalter verbaut, oder?
Oh - zu spät, hast Dich eh schon entschieden. Gut! :)
Bastler mit McGyver-Faible würden trotzdem das Getriebe öffnen und an das Ritzel vom Motor einen kleinen induktiven Geber bauen um die Umdrehungen zu zählen. Das ist aber deutlich aufwändiger und überschreitet deinen Kenntnisstand.
Angehängte Dateien:
-

Zwei_Dioden.png
999 Bytes
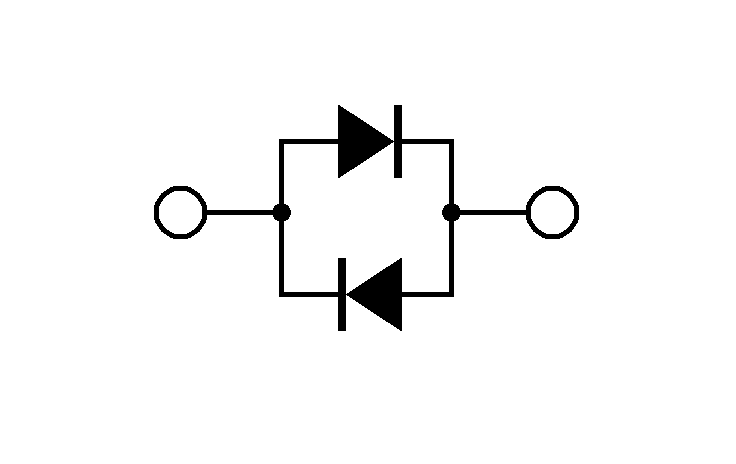
Axel S. schrieb: > Falk B. schrieb: >> Beitrag "Re: 12V auf 11,2 V reduzieren bei wechselnder Polarität" >> >> Damit werden einem Motor polaritätsunabhänig ca. 0,7V geklaut. Wenn das >> nicht reicht, nimm man nochmal 2 Dioden mehr. Einfach 3A Dioden sind >> ausreichend. >> >> > https://www.reichelt.de/1N-UF-AA-Dioden/1N-5400/3/index.html?ACTION=3&LA=2&ARTICLE=1745&GROUPID=2987&artnr=1N+5400&trstct=pol_1 > > Danke dir! Das probiere ich auf jeden Fall aus. Und täglich grüßt das Murmeltier.
@der schreckliche Sven (Gast)
>Und täglich grüßt das Murmeltier.
Wieso? Ich hab nicht "gegutenbergt" sondern auf deinen Beitrag verlinkt.
Falk B. schrieb: > Den muss man finden. Z.B. indem man die Trägerplatte halbiert und in der > Mitte Platz für den Motor läßt. Du brauchst ja keine Platte, > wahrscheinlich reicht ein Querträger aus Vierkant oder L-Profil. Ein Vierkantrohr ist oben auf die Multiplexplatte aufgeschraubt und steht auf beiden Seiten 5cm über um die Hubsäulen aufzunehmen. Falk B. schrieb: >>ist auf einer Multiplexplatte mit flacher Wandhalterung montiert. > > Das ist zwar einfach, aber wahrscheinlich auch eher dick. Da muss man > was anders machen. Das würde sicher anders, einfacher und leichter gehen. Die Rückwand hat nur auch die Funktion die fehlende Wand zu ersetzen. Ich hätte hier auch noch einen Raspberry Pi samt Raspirobot V3. Meint ihr man könnte das Grundproblem auch Softwaretechnisch lösen?
Hast du die Linearantriebe eigentlich unter Last gemessen, oder einfach so freistehend? Das kann nämlich einen deutlichen Unterschied in Sachen Hubzeit bedeuten.
Angehängte Dateien:
-

Nike-JustDoIt.jpg
28 KB

@ Axel S. (lernwillig) >Ein Vierkantrohr ist oben auf die Multiplexplatte aufgeschraubt und >steht auf beiden Seiten 5cm über um die Hubsäulen aufzunehmen. Dann hast du doch schon fast alles. >Das würde sicher anders, einfacher und leichter gehen. Siehe Anhang! >Ich hätte hier auch noch einen Raspberry Pi samt Raspirobot V3. Meint >ihr man könnte das Grundproblem auch Softwaretechnisch lösen? Nein, dazu braucht man die oben genannten Sensoren.
Hajo Koller schrieb: > "Über die Zeit aufschaukeln" kann sich dabei ja nichts - es sind ja > Endschalter verbaut, oder? Ja, Endschalter sind verbaut. der schreckliche Sven schrieb: > Axel S. schrieb: >> Das gleiche Problem mit einer Diode. > > Nimm 2 Lieber Sven, danke! :-)Das Murmeltier hat geschlafen
Falk B. schrieb: > Siehe Anhang! :-) Ok, überzeugt! Werde den Plan nochmals überdenken und überarbeiten! Vielen Dank für die vielen hilfreichen Ideen!
Alex G. schrieb: > Hast du die Linearantriebe eigentlich unter Last gemessen, oder einfach > so freistehend? > Das kann nämlich einen deutlichen Unterschied in Sachen Hubzeit > bedeuten. Auch noch ein guter Punkt. Habe sie tatsächlich noch nicht unter Last gemessen.
Wenn alles nicht geht, dann hilft nur noch ein ARDUINO UNO mit Winkelsensor, und steuersr damit die beiden Motoren unterschiedlich. https://www.voelkner.de/categories/13149_13262_14014/Bauelemente/Sensoren/Neigungssensoren-Winkelsensoren.html
Eigentlich geht es ja nicht darum, die Antriebe gleich schnell laufen zu lassen. Sondern es geht darum, daß der Fernseher waagerecht bleibt und der Lift nicht verkantet und sich verklemmt. Ob der Fernseher waagrerecht ist, läßt sich mit einem Accelerometer leicht feststellen. Ne Wasserwaagen-App tut das. Module dazu gibt massig. https://www.ebay.de/sch/i.html?_from=R40&_trksid=p2380057.m570.l1311.R1.TR2.TRC0.A0.H0.Xaccelerom.TRS0&_nkw=accelerometer&_sacat=0 Dann noch einen Arduino, zwei Motortreiber und ein wenig Software. Da kann dann auch das Fett in Lagern langsam ranzig werden, der TV sollte immer waagerecht sein. MfG Klaus
> Ob der Fernseher waagrerecht ist, läßt sich mit einem > Accelerometer leicht feststellen. Ich fürchte, dass diese Methode nicht feinfühlig genug ist. Durch wiederholtes hin und her biegen der TV Halterung wird diese womöglich geschädigt oder der ganze Mechanismus verklemmt sich. Ich hätte den Fernseher an Seile mit einer gemeinsamen Winde aufgehangen.
Stefan U. schrieb: > Ich fürchte, dass diese Methode nicht feinfühlig genug ist. Schon mal die Wasserwaagen-App auf dem Blödfone probiert? Jeder Quadkopter regelt 4 Motore um das Teil waagerecht zu halten selbst bei Querbeschleunigungen. MfG Klaus
Wenn die Führungen und das Teil welches darin läuft nicht zu kurz ist verkantet sich auch nichts. Ich würde aber nur einen Antrieb nehmen der in der Mitte wirkt. Dann hast du dieses Gleichlaufproblem nicht. Pakt es auch ein Antrieb?
Axel S. schrieb: > Das probiere ich auf jeden Fall aus. Warum Leute zielgenau immer von der einfach erscheinenden Lösung überzeugt werden auch wenn hinreichend oft darauf hingewiesen wurde dass die nichts taugt...
MaWin schrieb: > Axel S. schrieb: >> Das probiere ich auf jeden Fall aus. > > Warum Leute zielgenau immer von der einfach erscheinenden Lösung > überzeugt werden auch wenn hinreichend oft darauf hingewiesen wurde dass > die nichts taugt... Die Antwort ist ganz eifnach. Nicht jeder hat Lust und Zeit, DInge perfekt zu machen. Also ein Versuch ist das auf alle Fälle wert. Man könnte die Verbindung zum Fernseher auch etwas flexibel machen, damit es nicht gleich auf den Millimeter ankommt.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.