Hallo! Habe eine Anwendungsfall, für den mir keine Lösung einfällt. Denke aber das eine Lösung gar nicht so kompliziert sein wird bzw. hoffe das dass realtiv kostengünstig zum Umsetzen ist. Bin leider keine Mikro Elektronik-Experte und hoffe hier auf Hilfe. Beschreibung: Kleiner Bewegungsmelder (12V) geht an. Dann sollen 2 kleine Motoren jeweils eine Anglerschnur anziehen (das Gewicht ist klein, vl. 100 Gramm pro Schnur). Ist nur ein bestimmter Hub von ca. 3cm gewünscht. Wenn der Bewegungsmelder wieder ausgeht, dann soll die Motoren wieder auf die Grundposition zurückfahren. System soll am Besten auf Batterieebene mit einer kleinen Bleibatterie laufen - z.B 12V Wie mache ich denn das möglichst kostengünstig und einfach? Das einzige was ich bisher in Erfahrung bringen konnte, ist dass sowas mit zwei Treppenhausautomaten(relais) gehen könnte - die sind allerdings monster groß und teuer... lg, harald
Wie wäre die grundsätzliche Überlegung, wenn Du die Drehrichtung gar
nicht umkehrst, sondern 180° Drehung für eine Bewegung nutzt.
Dann brauchst Du den Motor nur in eine Richtung zu bewegen:
Unten:
,--.
,' \
/ |.
,' |
/ |
,' |
/ \
,' \
,' |
/ `.
/ |
,/ |
,' '|
_,,'''''"'--/_ \
/' __/ ". .........:........____
.' ||'/ \ | |
| '' | | |
| | | |
`. / | |
`b / | |
`.. ,' `-------------------./
`-..__,,,'
Oben:
,--.
,' \
/ |.
,' |
/ |
,' |
/ \
,' \
,' |
/ `.
/ .....................
,/ | |
,' | |
_,,'''''"'-,/_ | |
/' ,' ". | |
.' / \ | |
| /' | |..........._________|
| /' |
`. /' /
`b ,''"\. /
`..\..b| ,'
`-..__,,,'
sorry für Kindergarten-Zeichnung, anber das ging am schnellsten.
Dann hast Du nur noch mit etwas Zeitsteuerung und Endlagenerkennung zu
kämpfen.
Werner
Wie genau sollen die Motoren wieder auf die Grundposition zurückfahren? Wenn die Motoren nur über die Zeit angesteuert werden, sind die Wege bei gleicher Zeit nie identisch - besonders, da der Motor durch das Gewicht in der einen Richtung ziehen muss und in der anderen gezogen wird. Die Folge wäre: die Grundposition läuft mit jeder Betätigung etwas weg. Von der Antwort auf diese Frage hängt es ab, welche Lösung dafür geeignet wäre. Darüber hinaus ist es auch interessant, welche Möglichkeiten zur Realisierung du hast. Eine perfekte Lösung wäre z.B. ein Mikrocontroller, der einen Schrittmotor ansteuert. Eine Einfache Lösung gäbe es, wenn man an die Anglerschnur 2 Endkontakte "montieren" könnte: z.B. betätigt der Motor eine Gewindestange, an der die Schnur hängt und die 2 Kontakte montiert sind. Edit: Werners Lösung ist natürlich viel einfacher und genial :-))
Hallo! Wie wär's mit einer Modellbau- Segelwinde? Gibt es mit 1 oder mehreren Umdrehungen: http://www.vogel-modellsport.de/Windforce-502-Segelwinde-Krick-Modelltechnik-79071.htm?SessionId=&a=article&ProdNr=9-79071 http://www.vogel-modellsport.de/Pro-Boat-Segelwindenservo-Serenity-Horizon-PRB3480.htm?SessionId=&a=article&ProdNr=67-PRB3480&rdeocl=1&rdetpl=productpage&rdebox=box1 Ansteuerung erfordert allerdings ein PPM-Signal von 1...2ms bei ca. 20 ms Pause, kann man mit µC , z.B. PIC 12F1572 (76Cent bei Reichelt) oder evtl. NE555 generieren. Gruß Johannes
nimm einen schrittmotor und eine Steuerung. https://en.nanotec.com/products/1025-smci12-2/ Java Code verarbeiten. +- dran und den Motor anschließen. bei der SW können wir dir gerne helfen. so wie es aussieht kannst du das aber sogar bereits über die beigelegte konfig Software lösen. solche Steuerung gibt's auch vom Chinesen für ein drittel, da ist die Software aber eher gewöhnungsbedürftig. sg
Johannes R. schrieb: > Hallo! > > Wie wär's mit einer Modellbau- Segelwinde? Gibt es mit 1 oder mehreren > Umdrehungen: > > http://www.vogel-modellsport.de/Windforce-502-Segelwinde-Krick-Modelltechnik-79071.htm?SessionId=&a=article&ProdNr=9-79071 > > http://www.vogel-modellsport.de/Pro-Boat-Segelwindenservo-Serenity-Horizon-PRB3480.htm?SessionId=&a=article&ProdNr=67-PRB3480&rdeocl=1&rdetpl=productpage&rdebox=box1 > > Ansteuerung erfordert allerdings ein PPM-Signal von 1...2ms bei ca. 20 > ms Pause, kann man mit µC , z.B. PIC 12F1572 (76Cent bei Reichelt) oder > evtl. NE555 generieren. > > Gruß > Johannes Wie schaff ich den das mit der Rückwärtsdrehung bei dieser Version? Dreht sich der von selbst (bzw. mit Hilfe einer kleinen Last) von selbst zurück?
Werner schrieb: > Wie wäre die grundsätzliche Überlegung, wenn Du die Drehrichtung gar > nicht umkehrst, sondern 180° Drehung für eine Bewegung nutzt. > > Dann brauchst Du den Motor nur in eine Richtung zu bewegen: > > Unten: > > > sorry für Kindergarten-Zeichnung, anber das ging am schnellsten. > > Dann hast Du nur noch mit etwas Zeitsteuerung und Endlagenerkennung zu > kämpfen. > > > Werner Kreative Zeichnung ;) - danke! Ansatz ist einfach...frag mich gerade ob ich mir die Endschalter auch sparen könnte - z.B. mit einem Motor der jeweils nur 180 Grad dreht. Also Signal von Bewegungsmelder - 180 Grad Drehung - Bewegungsmelder geht aus - wieder 180 Grad Drehung. Gibt es sowas? Bzw. was mir noch nicht klar ist - wie schaffe ich es dass beim Ausschalten des Bewegungsmelders auch eine Drehung stattfindet?
Dietrich L. schrieb: > Wie genau sollen die Motoren wieder auf die Grundposition zurückfahren? Also ein paar Milimeter sind nicht das Problem - ab halben Zentimeter wird dann ca. zuviel - keine Ahnung ob sich die paar Milimeter dann aufschauckeln sodass 0,5 oder 1cm drauss wird
Clemens S. schrieb: > nimm einen schrittmotor und eine Steuerung. > https://en.nanotec.com/products/1025-smci12-2/ Klingt nach einer sauberen Lösung - aber leider zu teuer - außer die Preise fallen für Mini-motoren massiv ab? Also der Motor braucht keine große Last zu heben...wär super wenn eine Steuerung um wenige Euros gibt - vl auch nur mit einem Eingang (Bewegungsmelder) + Ausgang für Motoren... weiß wer obs sowas gibt?
Früher wurden viele solche Problemstellungen mit einer Scheibe am Motor/Getriebe und zwei oder mehr Mikroschaltern gelöst. Die Scheibe hat eine Kerbe, die Mikroschalter mit Rollenhebel liegen 180° versetzt. In der Kerbe sind die Mikroschalter aus, aus der Kerbe raus sind sie an. Gestartet wird mit einem externen Kontakt, der den Mikroschalter kurz überbrückt. Der Motor läuft bis zur 180°-Stellung, wo der zweite Mikroschalter den Kreis wieder öffnet, wenn er in die Kerbe fällt. Kommando zum Rücklauf wie vorher durch kurzzeitige Überbrückung dieses Schalters, der Motor läuft weiter bis zum anderen Mikroschalter. Eine Schaltung dürft ihr selbst zeichnen. Gruß - Werner
Harald M. schrieb: > Dietrich L. schrieb: >> Wie genau sollen die Motoren wieder auf die Grundposition zurückfahren? > > Also ein paar Milimeter sind nicht das Problem - ab halben Zentimeter > wird dann ca. zuviel - keine Ahnung ob sich die paar Milimeter dann > aufschauckeln sodass 0,5 oder 1cm drauss wird Bei der Lösung "Motor eine feste Zeit laufen lassen" würde sich der Fehler natürlich mit jedem Vorgang kumulieren. Aber nachdem bessere Lösungen bereits vorgeschlagen wurden ist das eigentlich nicht mehr interessant.
Harald M. schrieb: > Johannes R. schrieb: >> Hallo! >> >> Wie wär's mit einer Modellbau- Segelwinde? Gibt es mit 1 oder mehreren >> Umdrehungen: > Wie schaff ich den das mit der Rückwärtsdrehung bei dieser Version? > Dreht sich der von selbst (bzw. mit Hilfe einer kleinen Last) von selbst > zurück? Nein, das ist ein normales Fernsteuer-Servo, das seine Position analog zur Pulslänge einnimmt. Bei einer Pulslänge von 1ms läuft es auf einen Anschlag, bei 1,5ms auf die Mitte und bei 2ms auf den anderen Anschlag. Siehe http://www.modellbau-wiki.de/wiki/Modulation#Puls_Pausen_Modulation Zur Ansteuerung brauchst du dann noch einen passenden steuerbaren Pulsgenerator. Das kann man mit einem µC machen oder auch mit einem NE555-Timer: https://www.princeton.edu/~mae412/TEXT/NTRAK2002/292-302.pdf oder google nach "Servo ppm-generator NE555".
Angehängte Dateien:
-

angel.gif
3,6 KB
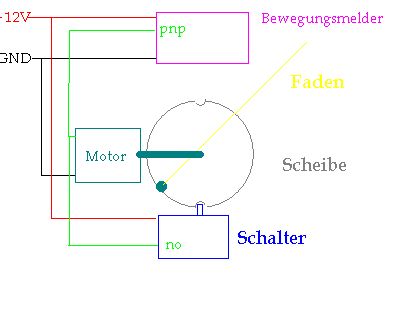
Harald M. schrieb: > Wie mache ich denn das möglichst kostengünstig und einfach? Ich denke auch, die Lösung mit der Scheibe von 3cm Durchmesser und einem Motor, der sie so dreht, daß ein Stift der den Faden hält entweder weit weg oder nah dran ist. Die Scheibe hat also 2 Stopp-Positionen, durch einen Microschalter. Der Bewegungsmelder muss einen starken PNP ausgang haben der bei Aktivierung mit plus verbunden wird und den Motoranlaufstrom verkraftet. Da das nur wenige 12V Bewegungsmelder haben, kann man auch einen P-Kanal MOSFET nachschalten wenn der Bewegungsmelder-Ausgang bei Aktivierung auf GND geht und sonst per pull up Widerstand an +12V fast 12V hat. Der Microschalter lässt den Motor laufen so lange er nicht an einer der beiden Haltepositionen steht, die durch Kerben in der Scheibe markiert werden, bei denen der Schalter dann öffnet. Der Motor läuft wieder an,w enn der Bewegungsmelder schliesst.
Michael B. schrieb: > Der Motor läuft wieder an,w > enn der Bewegungsmelder schliesst. Ok, danke für den Plan! Kapier zwar noch nicht wie das funktioniert: Der Pnp ist ja direkt mit dem Motor verbunden - d.h. so lange der Bewegunsmelder aktiv ist - dreht sich der Motor. Wie können die Endschalter den Motor aus machen? oder hab ich da etwas falsch verstanden und es fehlt noch was...
Jetzt ist noch eine Frage aufgetaucht: Wenn ich dass ganze richtig verstanden habe, soll der Bewegungsmelder den Motor nur ganz kurz ansteuern und dann machen das der Endschalter. Mein 12 V Bewegungsmelder hat aber eine minimale Einschaltzeit von 5 Sekunden. Habe auch bisher keinen online gefunden der kürzer schaltet. In 5 Sekunden hat leider schon mehr als 180 Grad Drehung stattgefunden...nach meinem Verständnis würde die Schaltung dann nicht mehr funktionieren - fällt euch da was ein?
schau einmal nach door lock actuator. https://www.google.at/search?q=door+lock+actuator die laufen mit 12 V und haben so rund 3 cm und schaffen die 100g locker. dazu ein 12V wechsler der den Motor umpolt, wenn der melder auslöst. die endschalter baust du in die zuleitung des motors ein und überbrückst sie mit einer diode. dann kann der motor bis an den endschalter fahren und wieder weg, der Motorstrom ist aber unterbrochen, bis er umgepolt wird. die dinger sind darauf ausgelegt gegen block zu fahren, halten den motorstrom aber nicht dauerhaft aus. sg
Harald M. schrieb: > so lange der Bewegunsmelder aktiv ist - dreht sich der Motor. Stimmt, du wolltest beim einschalten hinfahren und beim ausschalten zurückfahren. Harald M. schrieb: > Kleiner Bewegungsmelder (12V) geht an. Dann sollen 2 kleine Motoren > jeweils eine Anglerschnur anziehen (das Gewicht ist klein, vl. 100 Gramm > pro Schnur). Ist nur ein bestimmter Hub von ca. 3cm gewünscht. > > Wenn der Bewegungsmelder wieder ausgeht, dann soll die Motoren wieder > auf die Grundposition zurückfahren. Dann ist wohl doch der Modellbauservo besser, den man von einem NE555 Servotester aus betreibt, dessen Zeit vom 0V/12V Bewegungsmelderausgang abhängt. Denn mit Impulsen kann man nie sicher sein, ob er nun eingefahren oder ausgefahren stehen bleibt.
Angehängte Dateien:
-

Schaltplan.png
2,2 KB

Hallo, mein Vorschlag mit dem Servo war etwas voreilig: Die Mechanik ist einfach, aber das Servo zieht immer einen Ruhestrom und benötigt auch noch eine Spannung von ca. 5V, also einen Spannungswandler von 12V auf 5V. Besser ist da ein Getriebemotor mit Rolle oder Hebel. Die angehängte Schaltung benötigt nur ein Relais (K1) mit 2x Umschaltkontakten (K1/1 und K1/2) am Sensor und 2 Endlagenschalter (S1 und S2) als Öffner (z.B.: Pollin Best.-Nr. 420975 o.ä.) Die Schaltung arbeitet als Polwendeschaltung und hat bei Motor in Endlage keine Stromaufnahme. Gruß Johannes
Hallo Harald, mach mal ein grobes Kostenangebot. Könnte alles nach deinen Wünschen aufbauen. Controller gesteuert mit 2 Minigetriebeschrittmotoren und Minibewegungsmelder u.s.w. Gruß
Johannes R. schrieb: > Besser ist da ein Getriebemotor mit Rolle oder Hebel. > Die angehängte Schaltung benötigt nur ein Relais (K1) mit 2x > Umschaltkontakten (K1/1 und K1/2) am Sensor und 2 Endlagenschalter (S1 > und S2) als Öffner (z.B.: Pollin Best.-Nr. 420975 o.ä.) > Die Schaltung arbeitet als Polwendeschaltung und hat bei Motor in > Endlage keine Stromaufnahme. Hallo, Danke für die Schaltung - kleinen Getriebemotor hab ich zuhause - werd die Schaltung mal versuchen zum Nachbauen - auch wenn ich ziemlich unerfahren mit Elektro-Bauteile bin. Wo ist den hier der Bewegungsmelder einzuordnen (den ich jetzt habe schaltet minimal nach 5 Sek. wieder aus - eine halbe Umdrehung dauert aber weniger als 5 Sek. - stellt das ein Problem da?) Gruß , Harald
Harald M. schrieb: > eine halbe Umdrehung dauert aber weniger als 5 Sek. - stellt das ein > Problem da?) Das übernehmen die endschalter und beim türriegel beenden die anschläge die fahrt
Fred R. schrieb: > Könnte alles nach deinen Wünschen aufbauen. > Controller gesteuert mit 2 Minigetriebeschrittmotoren und > Minibewegungsmelder u.s.w. Mit Mini-Schrittmotoren klingt das auch interessant. Also ist jetzt vorerst nur mal um einen Prototypen zu bauen - wenns gut klappt kann sein das ich den Prototyp ein paar mal nachbaue - Elektronik sollte halt nicht viel Kosten, weil für eine sehr einfache Anordnung gedacht. Wieviel würdest du den grob schätzen, dass so eine Schrittmotor Lösung kostet - über 15€-20€? (also mein nur rein die Bauteile)
Harald M. schrieb: > eine halbe Umdrehung dauert aber weniger als 5 Sek. - stellt das ein > Problem da?) Das ist kein Problem - im Gegenteil! Nur so kann der notwendige Weg/Hub abgefahren werden. Um die gewünschten Endstellungen "kümmern" sich die Endlagenschalter. Siehe Skizze von Michael B., aber mit 2 Schaltern. Einen für jede Endlage. Die Anschlussart des Relais an den Bewegungsmelder hängt von dessen zulässigem Ausgangsstrom ab, evtl. muss noch ein Transistor zwischengeschaltet werden. Wichtig ist auch, ob der Ausgang des Bewegungsmelders nach Plus oder Masse schaltet. Aber für's Testen genügt es, wenn man das Rel. mit einem Taster ansteuert. Gruß J.R.
Angehängte Dateien:
-

Motor-R-L.jpg
70 KB

Hallo Harald, hast ja schon gute Vorschläge bekommen. Ich könnte mich aber mit dem Mechanikaufwand nicht anfreunden. Relais, Endschalter und der Schlupf deiner Motoren sind immer Fehlerquellen, auch wenn du auf Präzision nicht so angewiesen bist, beachte der Fehler kann sich schnell hochschaukeln. Gesamtkosten meine Variante werden wohl nicht die 30Eurogrenze überschreiten. Bildchen Module> Betrachtet man noch die Nutzungsvarianten mit Controllersteuerung, ist dies ein gewaltiger Mehrgewinn. Beispiel: Sensorauslösezeit ist nur eine „Momentaufnahme“. Schnell anziehen 30mm, langsam loslassen 30mm(mm- Angabe symbolisch) Schnell anziehen 20mm langsam weiter bis 30mm dann schnell loslassen Ist 15mm erreicht las LED1 leuchten ist 25mm erreicht las LED2 leuchten u.s.w. Muss nur vorab alles so programmiert werden. Natürlich könnte ich noch 2-3 Betriebsmodi einbinden, die mit Brücken gesetzt werden können(auch für zusätzliche „Schalter“). Steuerung, Sensor und Motoren sind als kleine eigenständig Module aufgebaut. Somit für X- Einbaubereiche kein Problem. Alle HW-Verbindungen werden natürlich mit Schraubklemmen bereitgestellt. P.S. Wenn Interesse dann per PN. Hat nichts mit den Kosten zu tun, bin nur ein alter Bastler, der nicht mehr alle Bauteile benötigt. Gruß
Fred R. schrieb: > Ich könnte mich aber mit dem Mechanikaufwand nicht anfreunden. > Relais, Endschalter und der Schlupf deiner Motoren Naja, Gleichstrommotoren haben keinen Schlupf, Du meinst sicher belastungs- und spannungsabhängige Drehzahlunterschiede. Spielt aber überhaupt keine Rolle, da immer die Endlagenschalter angefahren werden. Harald M. schrieb: >den ich jetzt habe schaltet minimal nach 5 Sek. wieder aus. also nicht wie Fred R. schrieb: > Sensorauslösezeit ist nur eine „Momentaufnahme“ Es genügt also, wenn der Motor innerhalb <5s den Endschalter erreicht. Mit Stepper brauchst Du auch einen Referenzpunkt (Schalter oder Lichtschranke), um nach Spannungsausfall/µC-Fehler/Brownout/Reset usw. oder Schrittverlust den richtigen Startpunkt wiederzufinden. Außerdem sollte man eine Möglichkeit schaffen, Weganpassungen/-änderungen vor Ort durchzuführen, will man nicht immer neu programmieren. Dass man mit µC noch einige "Späße" einbauen kann, ist unbestritten. Die Frage ist: wird's gebraucht? Gruß J.R.
Johannes R. schrieb: > Mit Stepper brauchst Du auch einen Referenzpunkt (Schalter oder > Lichtschranke), um nach Spannungsausfall/µC-Fehler/Brownout/Reset usw. > oder Schrittverlust den richtigen Startpunkt wiederzufinden. Ach so du hast mit der Mechanik diesen Startpunk immer auch nach total Energieausfall in Startposition? Naja der Controller hat mit Sicherheit auch dann immer ein 100% Startpunkt. Ist doch logisch diesen so für Inbetriebnahme so in der SW einzustellen. Nein ist der Mechanikaufwand, besser oder sogar kostengünstiger? Johannes R. schrieb: > Außerdem sollte man eine Möglichkeit schaffen, > Weganpassungen/-änderungen vor Ort durchzuführen, will man nicht immer > neu programmieren. Warum? Wenn mit Test sein Optimum für Anwendung gefunden wurde. Ja die Wegeanpassung kann dann natürlich sehr einfach mechanisch realisiert werden. Als alter Feinmechaniker gebe ich nicht sehr gern die Kurbel an die „Transfestiten“ ab, der Hinweis, „Kurbel auf dummen Kopf“ hat schon seine Berechtigung. Mal sehen wo es hinführt. Gruß
Fred R. schrieb: > Ach so du hast mit der Mechanik diesen Startpunk immer auch nach > total Energieausfall in Startposition? Natürlich, schließlich wird der Motor je nach Stellung des Relais IMMER bis zu entspr. Endlage fahren :-)) MfG
Angehängte Dateien:
-

IMG_1865.JPG
220 KB

{kind=link}
Johannes R. schrieb: > Hallo, > > mein Vorschlag mit dem Servo war etwas voreilig: Die Mechanik ist > einfach, aber das Servo zieht immer einen Ruhestrom und benötigt auch > noch eine Spannung von ca. 5V, also einen Spannungswandler von 12V auf > 5V. > > Besser ist da ein Getriebemotor mit Rolle oder Hebel. > Die angehängte Schaltung benötigt nur ein Relais (K1) mit 2x > Umschaltkontakten (K1/1 und K1/2) am Sensor und 2 Endlagenschalter (S1 > und S2) als Öffner (z.B.: Pollin Best.-Nr. 420975 o.ä.) > Die Schaltung arbeitet als Polwendeschaltung und hat bei Motor in > Endlage keine Stromaufnahme. > > > Gruß > Johannes So, hab jetzt von Conrad alle Teile besorgt - was mir jetzt beim Durchdenken der Schaltanordnung noch immer nicht ganz klar ist: Wenn die Mini-Schalter in der Endposition sind - wie kommen die da wieder aus der Position raus? Also es stand mal was von einer kurzen Überbrückung der Schalter, wie macht man das?
Dauerhaft mit einer diode brücken. Dann kann der strom nir in die wegfahrrichtung flossen. Johsnnes hat da schon einen schaltplan gepostet Sg
Clemens S. schrieb: > Johsnnes hat da schon einen schaltplan gepostet Genau, und damit keine Unklarheiten entstehen: Der offene Schalter S2 stellt eine Endlage dar! in einer Zwischenstellung sind S1 und S2 geschlossen. Gruß Johannes
:
Bearbeitet durch User
Hallo, Johannes R. schrieb: > Natürlich, schließlich wird der Motor je nach Stellung des Relais IMMER > bis zu entspr. Endlage fahren :-)) Johannes R. schrieb: > Genau, und damit keine Unklarheiten entstehen: > Der offene Schalter S2 stellt eine Endlage dar! in einer > Zwischenstellung sind S1 und S2 geschlossen. Schaltplan: Ist dies die Startbedingung in der „Polwendeschaltung“ ? Wärst du mal so freundlich auch mich mal den Ablauf zu erklären. Start> Endschalter> Spannungsausfall >Neustart u.s.w. natürlich mit Drehrichtungsangabe. Könnte ja ein logischer Ansatz für mich sein. Danke
@Fred Red: O.K., gehen wir mal davon aus, dass der Antrieb undefiniert irgendwo zwischen den Endlagen steht und dass das Relais in der gezeichneten Stellung steht: 1. S1 und S2 sind geschlossen, der Motor bekommt Spannung (links +, rechts -) und dreht, bis S2 öffnet -> D2 ist in Sperrrichtung -> Motor bleibt stehen. 2. Bewegungsmelder schaltet Relais: K1/1 und K2/2 schalten um, jetzt ist D2 leitend (Anode an Plus) und "überbrückt" S2 -> Motor bekommt Spannung, aber jetzt mit umgekehrter Polarität (links -, rechts +) und dreht andersherum -> S2 schließt nach Verlassen der Endstellung -> Motor läuft, bis S1 öffnet -> D1 ist in Sperrrichtung -> Motor bleibt stehen 3. Bewegungsmelder deaktiviert Relais (gezeichnete Stellung): -> D1 liegt mit Anode an Plus und überbrückt den offenen S1 -> Motor bekommt Spannung (links +, rechts -) -> S1 schließt nach Verlassen der Endstellung -> Weiter siehe Pkt.1 Gruß Johannes
:
Bearbeitet durch User
Johannes R. schrieb: > O.K., gehen wir mal davon aus, dass der Antrieb undefiniert irgendwo > zwischen den Endlagen steht und dass das Relais in der gezeichneten > Stellung steht: > > 1. > S1 und S2 sind geschlossen, der Motor bekommt Spannung (links +, rechts > -) und dreht, bis S2 öffnet > -> D2 ist in Sperrrichtung > -> Motor bleibt stehen. Aber Wie/ Wer setzt die beide Endlagenschalter auf geschossen. Na gut hast dich sehr viel Mühe gegeben um mich auf die Sprünge zu helfen. Hoffe das mein Wenn und Aber nicht Harald’s Bastellaune verdirbt. Gruß
Fred R. schrieb: > Aber Wie/ Wer setzt die beide Endlagenschalter auf geschossen. Der Ruhezustand ist "geschlossen"! Öffnen in der Endstellung erfolgt mittels Kerben in einer Scheibe (siehe Post von M. Bertrandt) oder mit Nasen/Nocken oder... MfG
Hallo! Schaltung funktioniert dank dem Schaltplan jetzt mal! Jetzt noch die Mechanik machen.. Danke schon mal! Gruß, Harald
@ Harald M. Prima! Hab' gerne geholfen. MfG Johannes
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.