Hallo Zusammen, ich versuche momentan eine CAN-FD Kommunikation aufzubauen und scheitere bei hohen Baudraten. Eventuell hat ja hier noch jemand Erfahrung mit den verwendeten Chips und kann helfen. Folgendes Problem: Auf der Platine befinden sich ein XMega, der CAN-FD-Controler MCP2517FD und der CAN-FD Transceiver MCP2562FD. Die normale Kommunikation mit CAN2.0 läuft problemlos. Auch die CAN-FD Kommunikation mit einer Nominal-Bitrate von 1MBaud und der Daten-Bitrate von 2MBaud funktioniert. Signale sehen am Oszi ebenfalls sauber aus. Nun wollte ich aber die maximale Baudraten der Daten auf 8MBaud hochschrauben, musste dabei aber feststellen das nichts mehr geht. Nach einigem Suchen und Probieren sind folgende Erkenntnisse gewonnen: CAN-FD funktioniert bis knapp über 2MBaud Daten-Bitrate, anschließend wird beim Senden einer Nachricht kurz nach dem Bitrate-Swich-Bit abgebrochen. So wie bisher beobachtet, werden nach dem Bitrate-Switch-Bit noch das ESI Bit und zwei Bits des Data-Length-Code (DLC) übertragen. Danach bleibt das CAN-High Signal auf "high". Wenn man das Diagnoseregister des CAN-FD Controlers ausliest, sind zwei Bits mit folgender Bedeutung gesetzt: Bit 1: During the transmission of a message (with the exception of the arbitration field), the device wanted to send a recessive level (bit of logical value '1’), but the monitored bus value was dominant. Bit 2: During the transmission of a message (or acknow ledge bit, or active error flag, or overload flag), the device wanted to send a dominant level (data or identifier bit logical value ‘0’), but the monitored bus value was recessive. Nun wäre ich über Hinweise und Lösungen dankbar, wie ich die Bitrate im Datenbereich der CAN-FD Nachrichten erhöhen kann und das ganze noch weiterhin funktioniert. Oder können die aktuellen Chips evtl. gar nicht mehr als 2MBaud??!? Viele Grüße, Fabian
Flyget schrieb: > Oder können die aktuellen Chips evtl. gar nicht mehr als 2MBaud??!? Jedenfalls scheint das Transceiver Datenblatt das so zu sehen. Was nicht heisst, das 8MBaud generell nicht geht mit passendem Bus (Länge, Verzweigungen, Teilnehmerzahl, ...). http://ww1.microchip.com/downloads/en/DeviceDoc/20005284A.pdf Seite 1: "Meets or exceeds stringent automotive design requirements (...) @ 2Mbps " Seite 3: "The Loop Delay Symmetry is guaranteed to support data rates that are up to 5 Mbps for CAN FD (Flexible Data rate). The maximum propagation delay was improved to support longer bus length." Flyget schrieb: > Diagnoseregister des CAN-FD Controlers ausliest, sind zwei > Bits mit folgender Bedeutung gesetzt: > Bit 1: > During the transmission of a message (with the exception of > the arbitration field), the device wanted to send a recessive > level (bit of logical value '1’), but the monitored bus value > was dominant. Das klingt doch ein wenig danach, als ob dein Bus das AC Timing für "Recessive bit time on RXD" bei 8 Mbps nicht schafft und durch das loop delay verspätet am RXD einliest was am TXD gesendet wird(wurde?). Seite 13 (AC spec) "t_BIT(RXD),8M Recessive bit time on RXD - 8 Mbps, Loop Delay Symmetry min 85/typ 105/max 140 ns see Figure 2-10 -> Note: The bit time of a recessive bit after five dominant bits is measured on the RXD pin. Due to asymmetry of the loop delay, and the CAN transceiver not being a push pull driver, the recessive bits tend to shorten."
Du kannst davon ausgehen, dass die Chips mehr als 2 MBaud können. Wenn die Hersteller die Bauteile für nicht mehr bewerben, heißt das, dass die Hersteller bei den üblichen Zertifizierungen irgendwo bei den EMV Tests durchgefallen sind wegen zu viel Abstrahlung oder DPI test nicht bestanden etc... 8 MBaud ist schon sehr schnell. Hast du mal geschaut, ob du nicht evtl. Probleme mit Ringing auf der Leitung hast?
Angehängte Dateien:
-

2MBaud_TX-Bus-fallend.PNG
11 KB -

2MBaud_TX-Bus-steigend.PNG
11 KB -

2MBaud_TX-RX-fallend.PNG
11 KB -

2MBaud_TX-RX-steigend.PNG
11 KB -

4MBaud_Bittiming.PNG
9,1 KB -

4MBaud_TX-Bus_fallend.PNG
9,1 KB -

4MBaud_TX-Bus_steigend.PNG
9,1 KB -

4MBaud_TX-RX_fallend.PNG
9,1 KB -

4MBaud_TX-RX-steigend.PNG
9,1 KB
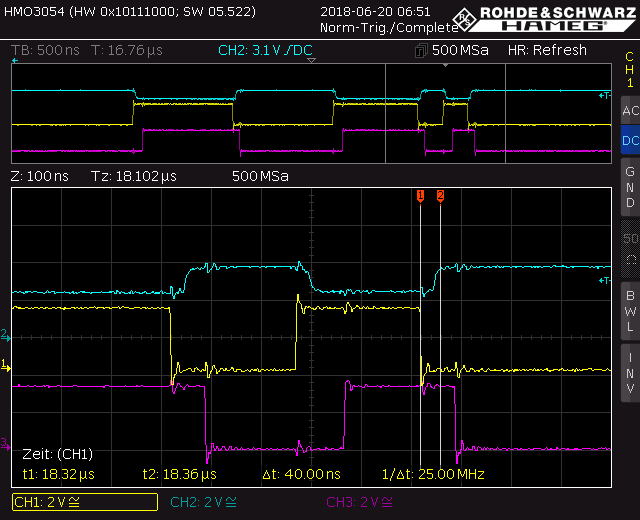
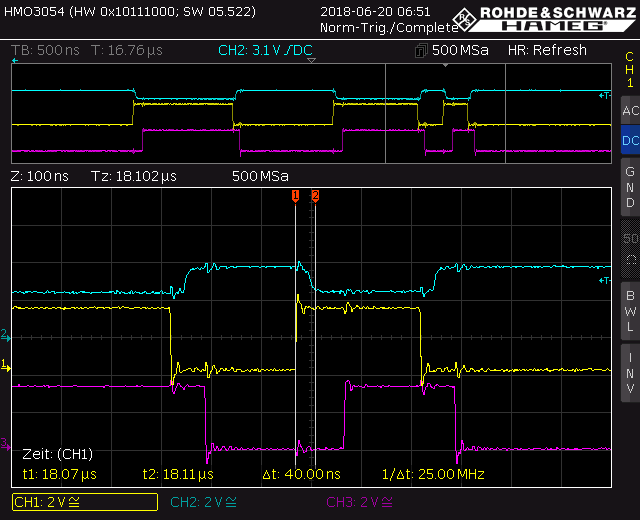
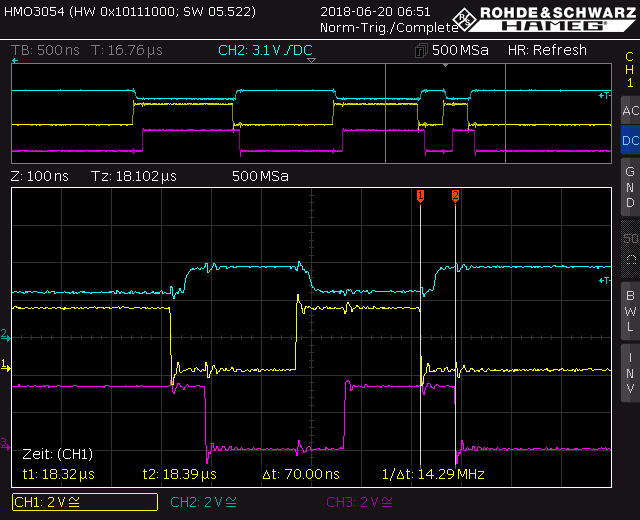
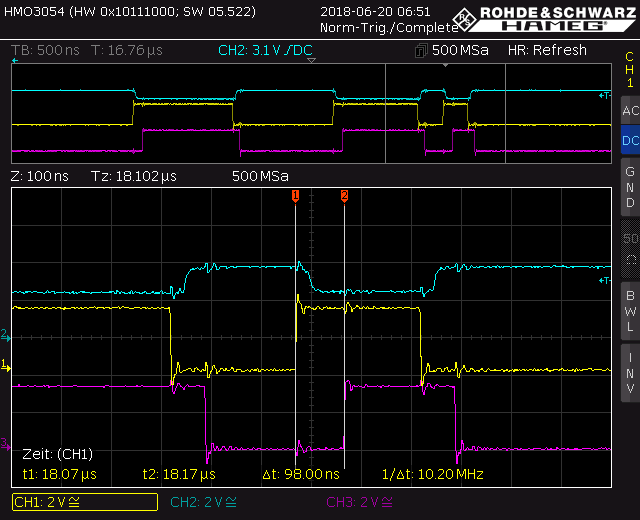
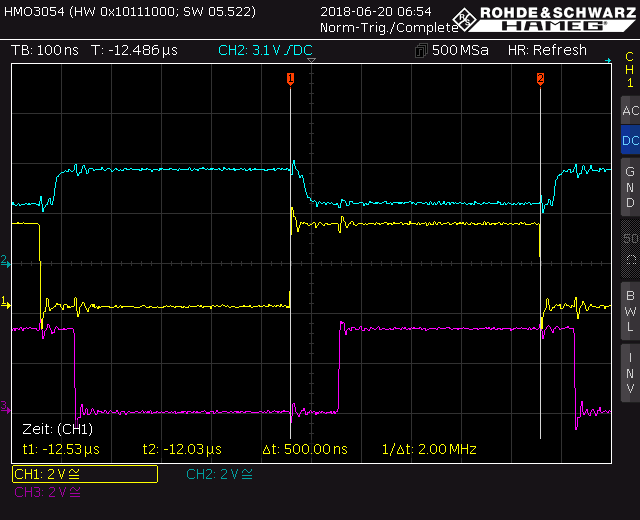
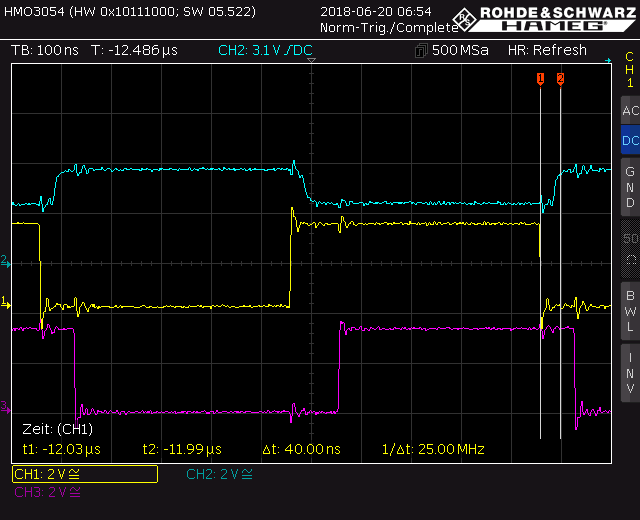
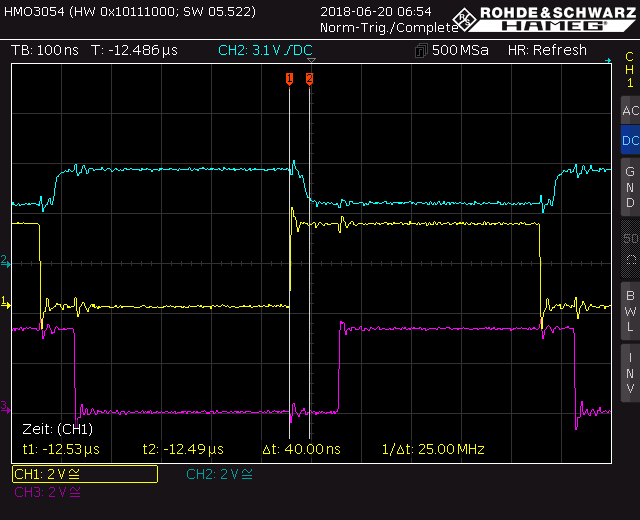
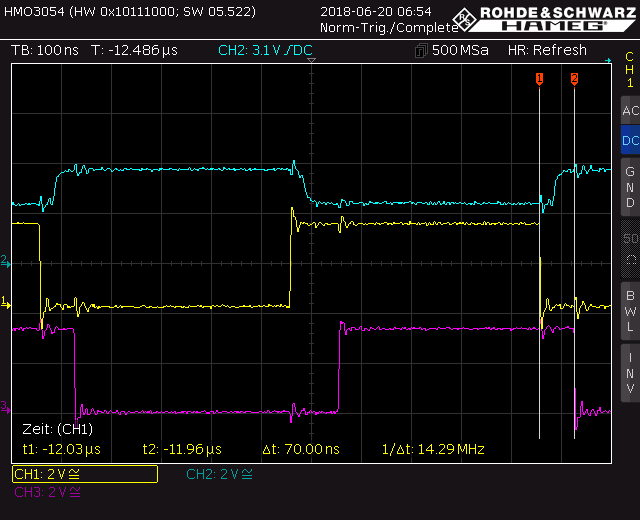
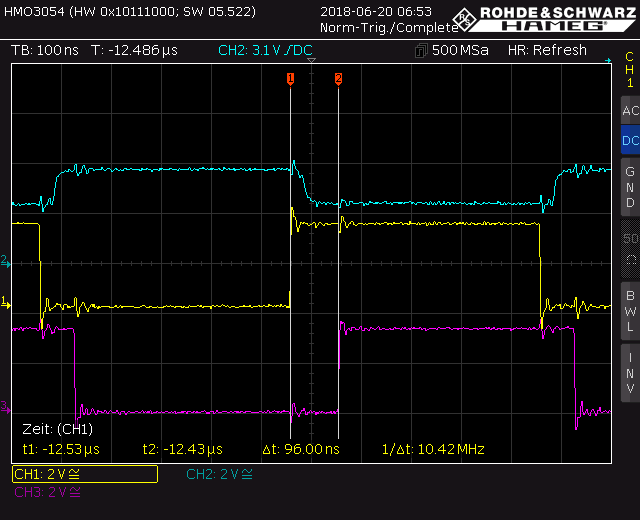
Hallo und schonmal vielen Dank für die Antworten! Nach Klingeln sieht mir das ganze nicht aus. Klar sieht das Signal nicht aus wie ein im CAD gezeichnetes Rechteck, aber doch brauchbar. Zur Verdeutlichung gibts Bilder im Anhang. Inzwischen ist auch die Differenzdrossel und die 2x 100pF am CAN-Bus entfernt. Optisch hat sich hier aber signaltechnisch nicht nennenswert etwas verändert... etwas steiler geworden natürlich. Zur Erklärung: - Blau -> CAN-High (ohne Differenzdrossel und Kondensatoren) - Gelb -> TX - Lila -> RX Was das Datenblatt angeht, sehe ich das ähnlich wie Robert, eigentlich sollte es trotzdem bei den höheren Frequenzen funktionieren. Die offiziellen CAN-Standards und irgendwelche EMV-Richtlinien werden dann zwar evtl. nicht mehr eingehalten, aber für den "nicht Automotive"-Bereich funktioniert es ja normal trotzdem. Ich hab in den Bildern im Anhang mal die Zeiten rausgemessen. Zwischen 2MBaud und 4MBaud ändert sich da nicht wirklich etwas. Bei 4MBaud is es natürlich nur insgesamt zeitkritischer bevor das nächste Bit kommt. Allerdings gibt es ja vmtl. kaum ne Chance das Timing des Chips zu beeinflussen, was wiederrum bedeuten würde, dass er nicht schneller als 2MBaud läuft... Weitere interessante Feststellung: Ich vermute der CAN-Controler ist das Problem, da selbst bei dessen Loopback-Mode die Sache nur bis 2MBaud funktioniert. Und da is ja der CAN-Transceiver nicht involviert.
Flyget schrieb: > Weitere interessante Feststellung: Ich vermute der CAN-Controler ist das > Problem, da selbst bei dessen Loopback-Mode die Sache nur bis 2MBaud > funktioniert. Und da is ja der CAN-Transceiver nicht involviert. Interessant. Ist beim Loopback-Mode (internal-/external-loopback) ein RXD-Eingangsfilter aktiviert? Nicht der Message-Filter, ich meine ein Filter gegen Glitches auf der RXD-Leitung. Der TFILTER (T00Filter .. T11Filter im WFT<1:0> bit) scheint nur relevant fürs Wake-up. Zitat: "The module can be programmed to apply a low-pass filter to the RXCAN pin while in Sleep mode. This feature can be used to protect the module from wake-up due to short glitches on the RXCAN pin." Der Edge Filter (EDGFLTEN bit) könnte das Problem sein. Schalte den doch mal ab. Wenn das Loopback dann immer noch nicht geht, schaue dir die Clock Einstellungen mit Bezug auf den Abtastzeitpunkt an. siehe dazu: - MCP2517FD Bit Time Calculations http://ww1.microchip.com/downloads/en/DeviceDoc/MCP2517FD%20Bit%20Time%20Calculations%20-%20UG.xlsx - http://ww1.microchip.com/downloads/en/DeviceDoc/20005678A.pdf Wenn du es hinbekommst den ext. CAN-FD Controller mit 8 Mbps zum laufen zu bringen, würde ich mich freuen zu erfahren welche reale Datenrate du mit dem hinbekommst. Denn an deinem µC ist der CAN-FD Controller nur mit 20 Mbps (SPI 20MHz) angeschlossen.
Ich kenne mich mit deinem verwendeten Controller nicht aus. Bei sehr hohen Baudraten ändert sich der bitzustand auf dem Bus so langsam, dass der CAN Core noch das vorherige Bit sieht und deshalb abbricht. Durch eine delay compensation wird das Rücklesen der Bits verzögert, sodass das wieder passt. Gibt es eine solche Kompensation bei deinem Controller? Der bosch M_CAN verfügt bspw. über ein solches Register, da es bei hohen Datenraten häufig zu Problemen kommen kann, wenn diese nicht aktiv ist. Probleme können natürlich auch aus anderen Faktoren im Bittiming entstehen (Sample Point ungünsitg gewählt etc.) Hier noch ein wenig Lektüre: https://www.can-cia.org/fileadmin/resources/documents/proceedings/2013_hartwich_v2.pdf
Hallo Flyget, ich benutze auch den MCP2517FD, bekomme aber nicht den Empfang mit dem FIFO_CH2 hin. Kannst Du mir einen Tip oder Deine Receive-Einstellungen mitteilen? Im FIFOSTA kommt nicht das Signal TFNRFNIF. alternative: p.palme@t-online.de
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.