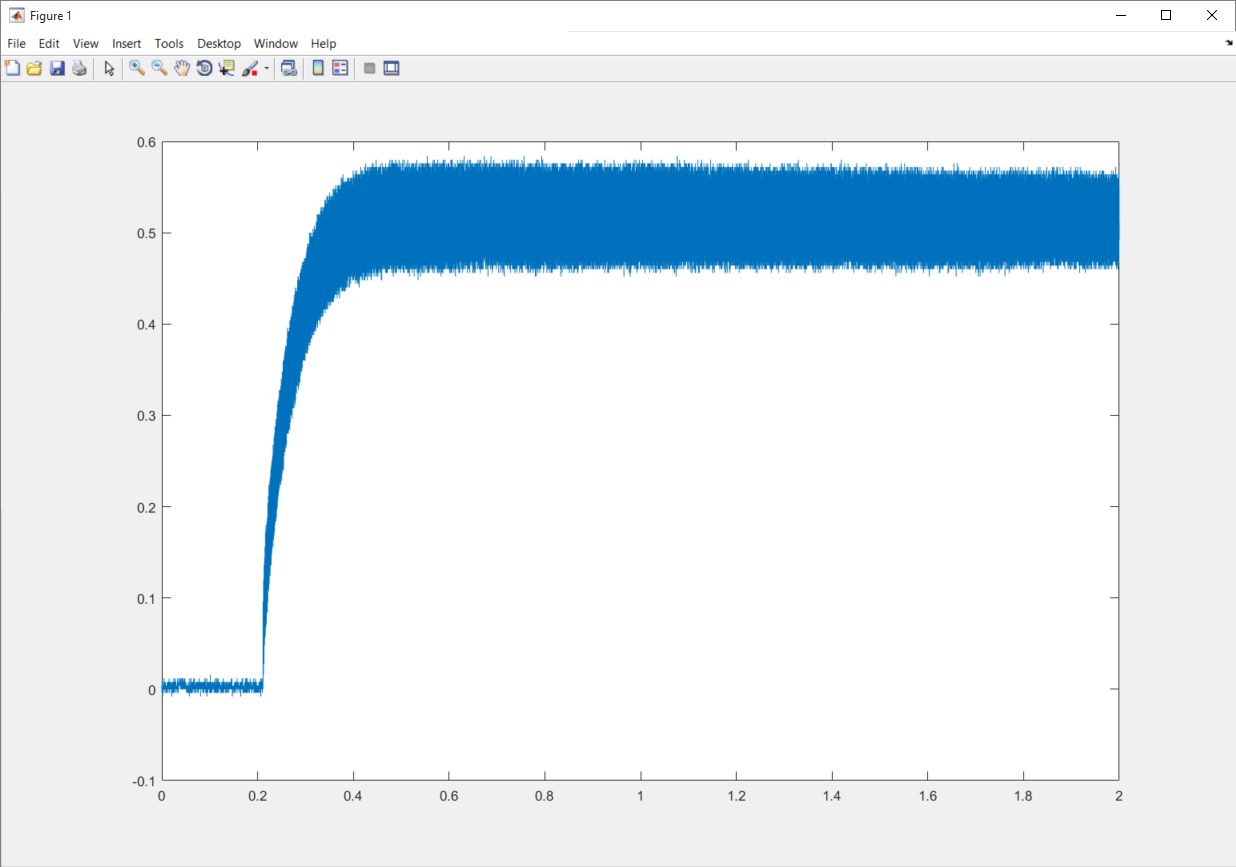
Hallo zusammen, ich hoffe, dass mir jemand hier weiterhelfen kann. folgendes Problem: Es soll der Stromregler (PI) mithilfe Arduino Due eines Magnetventil gesteuert werden. Zuerst habe ich einen Stromsprung (mittels PWM) aufgegeben. Hier gab es die Vorgabe, die Regelstrecke als PT1-Glied (siehe Anhang) zu approximieren. Jetzt das Problem ist die meisten Verfahren zur Einstellung der Regelparameter beruhen auf den Werten Tg und Tu. Diese kann ich jedoch bei meinem PT1-Glied nicht ermitteln, da es ja keine Wendetangente und keine Totzeit gibt.
Angehängte Dateien:
-

Sprungantwort.png
74 KB
:
Verschoben durch Moderator
Ich würde dir gerne mehr helfen, mir fehlt nur gerade Zeit. Symmetrisches Optimum ist was du brauchst. Ob das hier http://www.sinus-engineering.de/know-how/symmetrischesoptimum/ hilft, weiß ich nicht. Aber wenn du bis zum WE Zeit hast, kann ich dir sicher mehr helfen. VG
Danke für deine schnelle Antwort Felix. ja ich hab noch zeit und ich würde mich sehr freuen auf deine Hilfe LG
Cherif schrieb: > Diese kann ich jedoch bei meinem PT1-Glied nicht ermitteln, da es ja > keine Wendetangente und keine Totzeit gibt. Bode Diagramm des offenen Regelkreises. Anhand der Sprungantwort kannst du die Zeitkonstante des Systems ermitteln und hast entsprechend die Ü-Funktion der Strecke. Du hast deinen PI Regler, dessen P und I Anteil du bestimmen sollst. Du kannst die Ü-Funktionen der Strecke und des Reglers multiplizieren, was anschließend ein System 2. Ordnung wird. Bringst du dieses System in die Normalform, kannst du durch Vorgabe der Null- und Polstellen (so, dass das Bode Diagramm deinen Wünschen entspricht) für ein System 2. Ordnung mittels Koeffizientenvergleich den P und I Anteil berechnen. Gruß, Voraussetzung für dieses Verfahren: Du kennst die Grundlagen der Regelungstechnik und bist fit im Formel Umstellen. Alternatives Verfahren: Wurzelortskurvenverfahen
:
Bearbeitet durch User
> Magnetventil
Ein lineares Magnetventil ? Auf Position ?
per PWM ?
Zu Magnetventilen ist zu sagen, dass die Induktivitaet aendert, wenn das
Eisen eingezogen wird.
PT1-Gleider sind asymptotisch stabil. Die Zeitkonstante kannst du aus der Sprungantwort bestimmen. Mit einem reinen P-Regler erhält man stationäre Genauigkeit für Kp gegen unendlich. Mit PI wird das geregelte System schwingungsfähig. Hier ist der Ansatz nach Al3ko empfehlenswert.
Cherif schrieb: > Hier gab es die Vorgabe, die Regelstrecke als PT1-Glied > (siehe Anhang) zu approximieren Die Aufgabe war doch, eine PT1-Identifikation der Strecke zu finden. Warum willst du denn jetzt eine eine Wendetangente für PT2-Identifikation. Ist schon klar, für die Reglerberechnung, aber das funktioniert bei deiner Messkurve nicht. Optisch ist das ein reines PT1-Glied. Die 2. Zeitkonstante findest du so nie, sie ist eben sehr viel kleiner als die 1. Zeitkonstante. Für die Reglerberechnung musst du sie schätzen und bei der praktischen Ausführung empirisch ermitteln. Das ist dann recht einfach, weil damit nur die Dämpfung beeinflusst wird. Das sieht man dann direkt am Überschwinger der Sprungantwort.
Die Berechnung der PI-Regelparameter habe ich hier schon mal für einen ähnlichen Fall durchgeführt: Beitrag "Re: Schwierigkeiten bei PID-Regler Einstellung" Kurz danach folgt auch die Berechnung eines PID-Reglers.
So, ich habe mal meine unterlagen durchgesehen und festgestellt, dass ich für einen PI-Regler an einer PT1-Strecke kein Patentrezept habe. Tut mir leid, wenn du extra auf mich gewartet hast. Aber ich habe mal etwas rumsimuliert. Folgende Annahmen: Kstrecke = 0,5 Tstrecke = 0,07s Kregler = 3 Tn = 0,07 Tv = 0,04 Leider fehlen insgesamt noch einige Infos, z. B. der Ausgangsbereich deines Reglers und der Eingangsbereich deiner Strecke. Wie groß war der Sprung am Streckeneingang oben (welche Einheit?) etc. So aus blauem Dunst heraus kann der P-Anteil groß werden (wenn der Reglerausgang "viel" liefern kann. Der I-Anteil und die Wahl der Zeiten scheinen unkritisch und hängen fast nur davon ab, wie schnell der Strom auf dem Endwert sein soll. Aber beser wird's erst mit mehr Infos.
Das ist so primitiv. T63 ablesen—> pt1 identifiziert. Schon ist der Zählerterm vom Regler klar. Kp iterativ oder durch inverse Laplace Trafo zur Üschwingweite bestimmen. Sache von 15min.
Angehängte Dateien:
-

2018-06-26_11h14_31.png
98 KB -

2018-06-26_11h16_10.png
170 KB
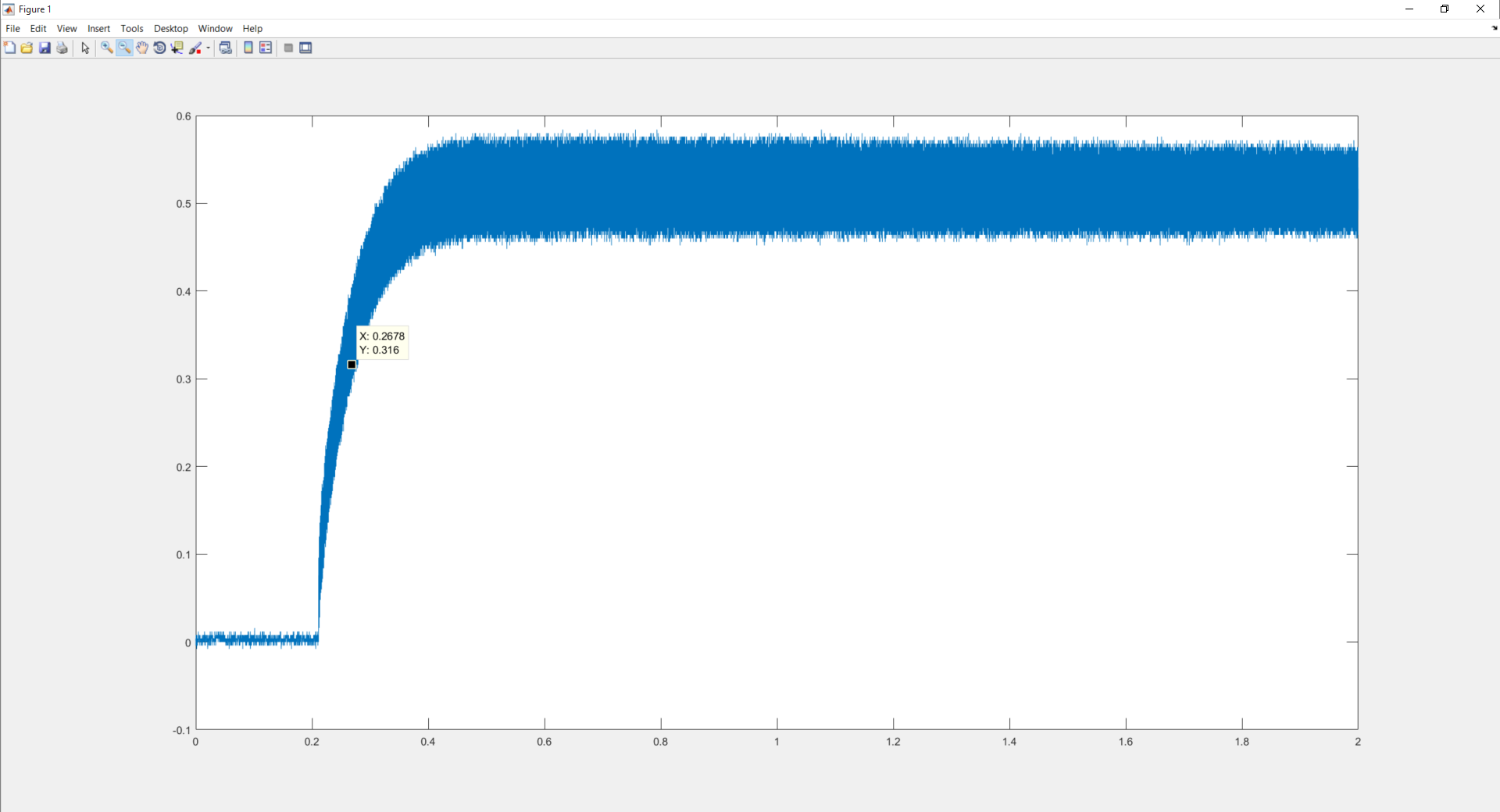
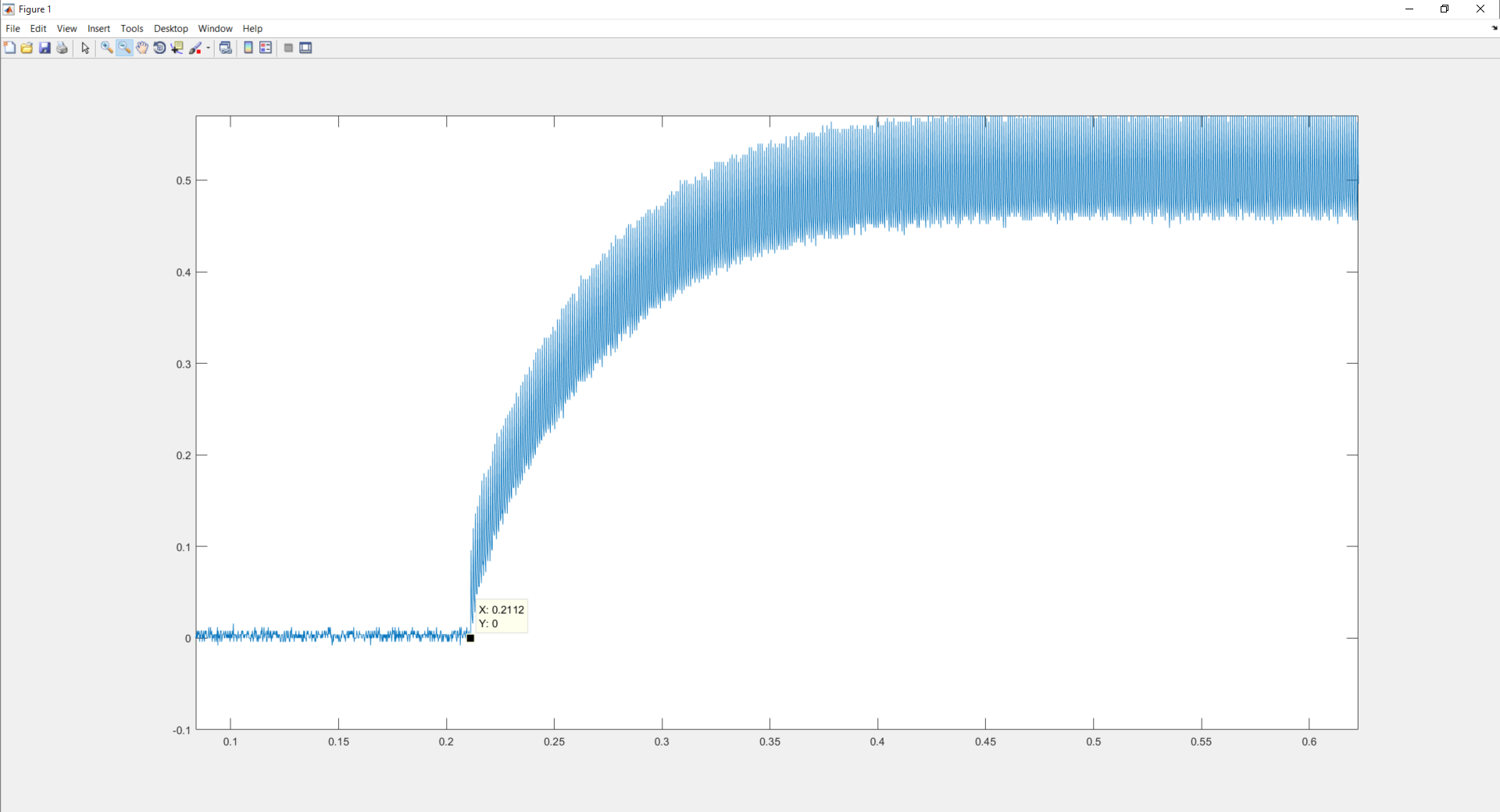
Felix schrieb: > Leider fehlen insgesamt noch einige Infos, z. B. der Ausgangsbereich > deines Reglers und der Eingangsbereich deiner Strecke. Wie groß war der > Sprung am Streckeneingang oben (welche Einheit?) etc. Also das PI-regler regelt das Strom mithilfe einen MOSFET dh. als Ausgang des Reglers ist ein PWM mit 8 Bit Auflösung und 1Kh Frequenz und als Eingang wurde das Signal abgetastet Mittels ADC - 12 Bit(was entspricht von 0 Ampere bis 3.6 Ampere). die werte vom Sollwert und Istwert werden im Programme umgerechnet . auf die Y-Axe ist Strom mit Ampere und auf x-Axe ist zeit mit sec und für Sprungantwort habe als Sollwert 0.5 Ampere gegeben. ich habe die Zeitkonstante berechnet (s. Anhang) vom Anfang bis 63% von Sollwert T= 0.2678-0.2122 = 0.0556 sec Felix schrieb: > Kregler = 3 > Tn = 0,07 > Tv = 0,04 kannst du mir bitte kurz erklären wie hast du das berechnet
Danke für deine Antwort Al3ko -. schrieb: > Du kannst die Ü-Funktionen der Strecke und des Reglers multiplizieren, > was anschließend ein System 2. Ordnung wird. ich habe die Zeitkonstante und Verstärkung von Sprungantwort ermittelt T= 0.2678-0.2122 = 0.0556 sec K = 0.5 Amper und genau wie du gesagt hast hab die Ü-Funktionen der Strecke und des Reglers multiplizieren,was anschließend ein System 2. Ordnung wird. Strecke: G_S = 0,5/(1+0.0556*s) PI-Regler: G_R = K_P*(1+1/(TN*s)) = K_P/T_N * 1/s * (1+TN*s) mithilfe Kompensationsverfahren (1+TN*s) = (1+0.0556*s) T_N = 0.0556 sec Damit hat man den Faktor (1+0.0556*s) im Nenner kompensiert. Gesamtübertragungsfunktion des offenen Regelkreises ist: G(s) = G_R*G_S = K_P/T_N *0,5 /s aber ich komm nicht klar mit Bode Diagramm kannst du mit bitte weiter helfen
Zunächst zum "wie": RegCSharp von hier benutzt: http://www.joergbayerlein.de/?page_id=154 Dann habe ich den PI-Regler und die Strecke designed. Gegebene Werte der Strecke sind (sofern ich deine Infos richtig deute) Tn = 0,0556s Kn = 1 Für den Regler habe ich eine der Zeitkonstanten wie die der Strecke zur Kompensation gewählt. Für die zweite Zeitkonstante scheint es keine Regel zu geben, da die Wahl auf die Kurvenform nahezu keinen Einfluss hat. Aber wenn jemand etwas mehr dazu weiß, ich lerne gerne dazu. Das Kr kannst du jetzt wählen. Hierfür gilt, dass der Reglerausgang bei größtmöglichem Eingangssprung nicht in die Begrenzung gehen sollte, weil der I-Anteil sonst zu einer längeren Zeit bis zum Erreichen des Endwertes führt. Beispiel: maximaler Reglerausgang 3,6A -> bei einem Sprung auf 3,6A und einer Begrenzung auf 3,6A darf Kr nur 1 sein. Wie zu sehen, ist es insgesamt wichtig, dass alle infos angegeben werden. Hierzu gehört auch, wie groß und welche Einheit der Reglereingang hat (V oder A, Bereich), der Reglerausgang sowie der Streckenausgang. Das fehlt leider noch.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.