Hallo zusammen, für einen Achsen-Driver 5V -Trigger (CNC-Router) habe ich bisweilen einen Atmel-320p verwendet um per Interrupt die Inkremente mitzuzählen. Seit neustem habe ich den 160Mhz NodeMCU Prozessor und bin begeistert über dessen Rechenleistung. Nun erhoffe ich damit wesentlich höhere Geschwindigkeiten mitzählen zu können (bisher 1.5Khz per Interrupt) Der Chip hat jedoch eine 3.3V Architektur, und wenn ich das 5V Trigger-Signal runterteile , bange ich das der eigentliche Motortreiber nicht mehr richtig durchsteuert ? (Da ich ja parallel "mitlausche"). Gibt es Hinweise wie ich das machen könnte, das 5V TTL Signal am 3.3V GPIO anzukoppeln ohne was zu zerstören, und dennoch den Treiber-Motor korrekt am Ende anzusteuern ? (Der Teiler abgriff würde ja das ganze Signal runterziehen. Vielen Dank für Hinwiese Karsten aus Berlin
Karsten S. schrieb: > (Der Teiler abgriff würde ja das ganze Signal runterziehen. Wieso? Zeige mal ein Schaltbild, wie du dir einen Spannungsteiler vorstellst.
Angehängte Dateien:
-

20180908_162204_1_.jpg
240 KB
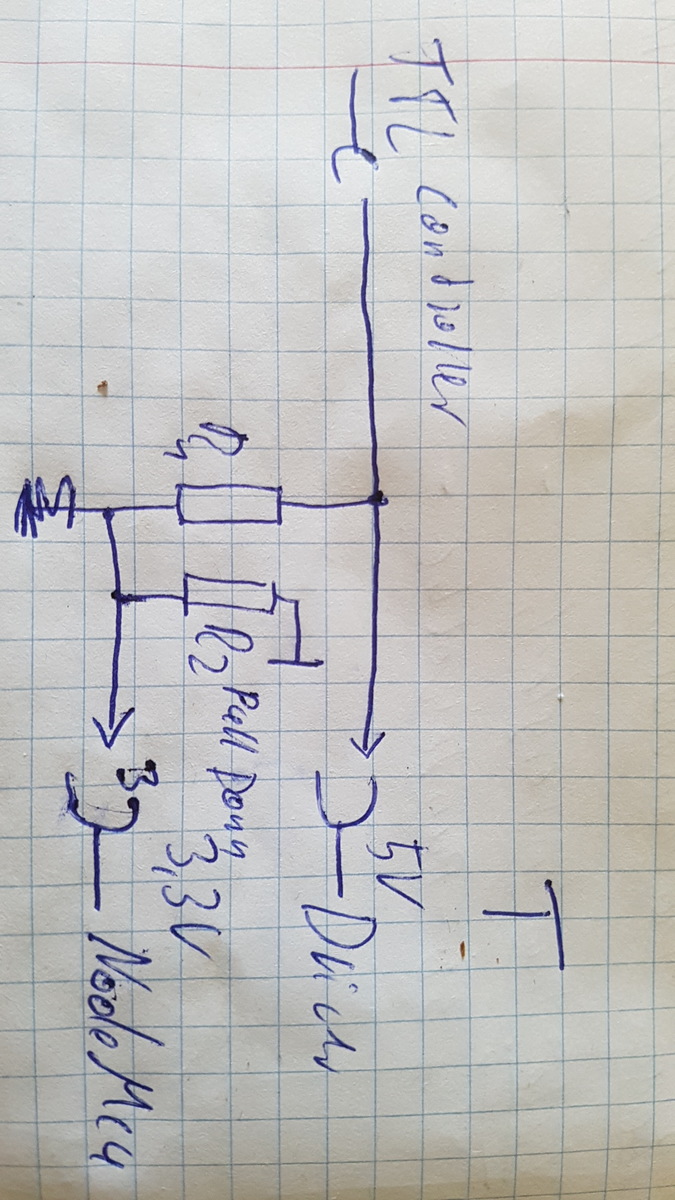
Inetwa sowas.. also wäre okay und der Driver bekommt noch genug ab ..? Danke für deine schnelle Antwort. Karsten
Karsten S. schrieb: > ... und der Driver bekommt noch genug ab ..? Das kommt auf deine Widerstandswerte und die Ausgangsstufe von deinem Achsen-Driver 5V -Trigger (CNC-Router) an ;-)
Der Driver/Controller wird so ~30mA leisten. Na dann muss ich mich da
durch testen am Steckbrett.. Eigentlich hoffte ich das einer Sagt: Hau
die 5V direkt auf den MCU, denn teilweise läuft da auch ne 5V -Spannung.
Oder über eine Kapazität ,da der sogenannte TouchScreen GPIO's hat.
Das habe ich bisher noch nicht gesehen. Scheinen also Fet -Eingänge zu
sein.
Meine Ahnung ist nur Grundlagenbasis ^^
Danke für deine bestärkenden Hinweise :)
Lg aus Berlin
K.
Karsten S. schrieb: > Achsen-Driver 5V -Trigger (CNC-Router) Einen was? > Atmel-320p Den gibt es nicht und gab es wohl auch früher nicht, als die Firma noch Atmel hieß. > den 160Mhz NodeMCU Prozessor Du meinst ein NodeMCU Board mit dem ESP8266 Chip. Normalerweise wird der übrigens mit 80MHz getaktet und dabei würde ich an deiner Stelle auch bleiben, wenn er zuverlässig laufen soll. > Nun erhoffe ich damit wesentlich höhere Geschwindigkeiten mitzählen zu > können (bisher 1.5Khz per Interrupt) Ich kann Dir versichern, dass alle AVR ATmega Chips weit mehr schaffen, wenn man sie korrekt programmiert. > Der Chip hat jedoch eine 3.3V Architektur, und wenn ich das 5V > Trigger-Signal runterteile, bange ich das der eigentliche > Motortreiber nicht mehr richtig durchsteuert ? Du solltest ein bisschen Grundlagen zu Elektronik lernen. An der richtigen Stelle eingesetzt und richtig dimensioniert wird der Spannungsteiler bis zu einigen hundert kHz funktionieren. Für höhere Frequenzen kannst du Pegelwandler aus Logik-Gattern bauen. Siehe https://www.mikrocontroller.net/articles/Pegelwandler > Der Teiler abgriff würde ja das ganze Signal runterziehen. Zeige mal deinen Schaltplan, den du dabei im Sinn hast.
Karsten S. schrieb: > Der Driver/Controller wird so ~30mA leisten. Dann wird er sich über bspw. 1 oder 2mA, die du durch den Spannungsteiler fließen läßt, nicht aufregen.
Alles klar, hoffte nur direkt dran gehen zu können, muss alles im Kabel eingemummelt werden... Danke K.
Stefanus F. schrieb: > Zeige mal deinen Schaltplan, den du dabei im Sinn hast. Du meinst einen, bei dem man keine Knoten ins Hirn kriegt und sich nicht den Hals verrenken muss? ;-)
NodeMCU ist zwar nett, aber kannst du gleich in die Tonne hauen. Verbau lieber einen ESP32. https://www.banggood.com/WeMos-ESP32-WiFi-Bluetooth-Development-Board-Ultra-Low-Power-Consumption-Dual-Core-ESP-32-ESP-32S-p-1175488.html?rmmds=search&cur_warehouse=CN Mit der esp-idf Toolchain nochmal besser zu programmieren, zudem ist die Leistung noch höher.
Hi Egon, genau den habe ich aber ? Ich habe den einfach halt-haber, am Arduino IDE drann. Meine atiny's85 beschreibe ich in ASM via AtmelStudio und Programmer (als usb client HidDevice). Aber deine Abbildung enthält nicht den 8266 ?: https://blog.thesen.eu/http-1-1-webserver-fuer-esp8266-als-accesspoint/ Das ist Teil lautet via Arduino NodeMCU .-esp8266-
Karsten S. schrieb: > Dein Rat kommt direkt von Gott. Ich denke, da irrst du dich. Wolfgang schrieb: >> Zeige mal deinen Schaltplan, den du dabei im Sinn hast. > Du meinst einen, bei dem man keine Knoten ins Hirn kriegt > und sich nicht den Hals verrenken muss? ;-) Naja, ein schlechter wäre immer noch besser als gar keiner. Egon N. schrieb: > NodeMCU ist zwar nett, aber kannst du gleich in die Tonne hauen. > besser zu programmieren, zudem ist die Leistung noch höher. Dazu vermisse ich eine schlüssige Begründung. Die Leistung ist ein schwaches Argument. Mir fallen nämlich spontan gleich mehrere Alternativen ein, die noch viel mehr Leistung haben und viel viel viel komfortabler zu programmieren sind. Nach deiner Logik wäre somit der ESP32 auch für die Tonne. Karsten, eventuell helfen Dir meine Infos auf der Seite http://stefanfrings.de/esp8266/index.html Bezüglich des Spannungsteilers kann ich Dir aber nur weiter helfen, wenn du einen kleinen Schaltplan zeichnest. Du hast dazu ja bedenken geäußert, die kann ich nur bereinigen, wenn ich den Plan dazu sehe, der Dir nicht gefällt.
Danke, hier ist der Hinweis den ich nochmal bestätig sehen musste: http://stefanfrings.de/esp8266/spannungsteiler.png Wunderbar und bei 180Mhz ohne Probleme mit 300Khz via Arduino interrupt getestet, damit damit doppelt so schnell als mein aktueller 328p. Bei Interrupt -Ruhe wird Wifi aktiviert, und mein Achsencoder hat ne Webseite als Ap, fährt die Achse muss WiFi deaktiviert werden, um die hohe Abtastrate zu ermöglichen. Encoder Action: https://www.youtube.com/watch?v=FAaSfigbN4A&t=5s
{kind=link}
Karsten S. schrieb: > fährt die Achse muss WiFi deaktiviert werden, um die > hohe Abtastrate zu ermöglichen. Bist du denn ganz sicher, dass dein Programm nicht gestört wird, wenn WiFi deaktiviert ist? Ich weiß nur mit Sicherheit, dass es seltener unterbrochen wird. Aber ob es dann wirklich gar nicht mehr unterbrochen wird, so weit habe ich es nicht untersucht.
Hi, also ich beduddel das mcu Gerät 8266 mit Arduino , und habe es lediglich am Taktgenerator, läuft Wlan mit Initialisierung ist der Irq bei 120Khz zuverlässig (über rs232 zählerrückgabe). Ist rs232 und WiFi nicht initalisiert sondern erst später, ist der IRQ schneller 300Khz. Spaßiges Gerät, ob ich es Anwende weiß ich nicht, hier gibt es ja auch schon das 32x Gerät mit zwei Prozessoren. ! Der Trend ist klar, es wird kleinste Hochleistungsrechner in der nahen Zukunft geben.
Karsten S. schrieb: > beduddel das mcu Gerät 8266 mit Arduino > hier gibt es ja auch schon das 32x Gerät mit zwei Prozessoren. Junge, wenn Du ernsthafte Hilfe haben möchtest, dann benenne die Dinge richtig! > Der Trend ist klar Nicht wirklich. Der ESP32 fristet nach meinem Kenntnisstand ein Nischen-Dasein und seine Firmware ist noch schlechter, als die vom ESP8266. > es wird kleinste Hochleistungsrechner in der nahen Zukunft geben. Du meinst wohl, dass die Embedded Systeme immer Leistungsstärker werden. Das wird nicht so kommen, es ist längst der Fall. Jedes Smartphone ist um ein vielfaches Leistungsstärker, als der IBM PC. Zitat von Bill Gates 1981: "Mehr als 640 Kilobyte Speicher braucht kein Mensch" Intel sagte in den 90er Jahren ungefähr: "Mehr als 333MHz ist technisch nicht machbar". Aber es scheint sich ein Ende abzuzeichnen. Das Mooresche Gesetz zur Leistungssteigerung galt ca 50 Jahre lang, jetzt aber nicht mehr. Die Leistungssteigerung lässt nach. Und vor wenigen Tagen habe ich gelesen, dass zwei Chiphersteller die Produktion ihrer neuesten 7-10nm Strukturen eingestellt haben. Unter anderem, weil dabei zu viel Ausschuss heraus kommt um sich zu lohnen. Sowohl bei der Taktfrequenz als auch bei der Anzahl der Transistoren sind wir bei einem Punkt angekommen, wo es nicht mehr so schnell voran geht, wie früher. Heute werden unsere Rechner durch hinzufügen weiterer Kerne stärker. Doch je mehr Kerne ein Rechner hat, umso mehr bremsen sie sich gegenseitig aus und umso weniger Programme können davon profitieren. Um Moores Gesetz weiterhin zu erfüllen, müssten wir alle zwei Jahre die Anzahl der CPU Kerne vervierfachen und neuerdings auch unsere Software umschreiben. Das wird aber nicht mehr so schnell passieren, zumal die Programme immer komplexer werden und die Arbeitsleistung der menschlichen Softwareentwickler auch ihre Grenzen hat. KI im Haushalt wird uns schon seit den 80er Jahren versprochen. Nach wie vor sehe ich keine funktionierenden Produkte. Die "Intelligenteste" nützliche Maschine in meinem Haushalt ist seit vielen Jahren das Navi. Microsoft hatte in den 90er Jahren Kühlschränke angekündigt, die automatisch Nachbestellen und verdorbene Waren entfernen. Wo sind die denn? Solange sich unsere KI darauf beschränkt, Google per Spracheingabe zu bedienen und Termine in Kalender einzutragen, kann ich das noch nicht ernst nehmen. Wie war das doch neulich: Ein ex Chef-Entwickler dieser Sprachassistenten hat sich öffentlich enttäuscht geäußert, dass seine Technologie immer noch im frühen Entwicklungsstadium steckt. Das Projekt komme kaum spürbar voran. Wir nennen heute Türschlösser Smart, wenn man sie mit dem Smartphone öffnen kann und den Schlüssel drinnen liegen lassen kann. Was tut man für den Fall, dass der Akku mal leer ist? (Bitte mal ganz scharf nachdenken). Smart ist das jedenfalls nicht! Es gibt Intelligente Autos die ganz alleine fahren können. Aber wenn es Kracht, ist der Mensch hinter dem Lenkrad Schuld. Hä? Ich dachte, die Software ist der Fahrer. Hier haben wir eine scheinbar intelligente Lösung, die an unserer Ethik scheitert. Ganz ehrlich: Meine Zukunft-Visionen sehen ziemlich banal aus. Vielleicht kommunizieren wir demnächst mit Stöpseln im Ohr, die Fernseher werden noch größer, um den Nachteil der Werbebanner rings herum auszugleichen, Autos fahren vielleicht wirklich alleine und unser Essen kommt verzehrfertig aus Automaten. Wir werden durch die Luft und den Weltraum fliegen. Aber das war's dann schon. Ich halte die Darstellung der Zukunft in StarTrek für ziemlich realistisch, mit Ausnahme des Doktors. Den wird es so wohl nie geben.
Stefanus F. schrieb: > Heute werden unsere Rechner durch hinzufügen weiterer Kerne stärker. > Doch je mehr Kerne ein Rechner hat, umso mehr bremsen sie sich > gegenseitig aus und umso weniger Programme können davon profitieren. Das Problem ist keine Erfindung unserer Tage. So weit war man schon Ende der 90er Jahre bei den Transputern von Inmos
Wolfgang schrieb: >> Heute werden unsere Rechner durch hinzufügen weiterer Kerne stärker. > So weit war man schon Ende der 90er Jahre bei den Transputern von Inmos Schon, aber bis vor wenigen Jahren konnten die Taktfrequenzen immer weiter erhöht werden. Damit ist jetzt offenbar Schluss. Jetzt kann man nur noch in die Breite gehen. Daran hat auch die 7nm Technik nichts geändert, die uns noch vor wenigen Monaten diesbezüglich als Heilsbringer präsentiert wurde.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.