Hallo, ich habe 2 TomTom ONE Navigationsgeräte geschenkt bekommen. Nun suche ich Infos zum OpenTom Projekt. Das ist ja leider ausgestorben. Die Community Projekt-Webseite ist down. Nun hab ich dennoch weitgehendst alle Sourcen vom Linux Kernel und den Paketen oder Diffs über TomTom, und größten Teils über die WaybackMachine (Internet-Archive) gefunden. Ich weiß bloß leider nicht wie es weiter geht. Ich bekomm das nicht kompiliert.... Entweder ist meine Distri zu neu, oder irgendwas anderes will einfach nicht. Hat vielleicht noch jemand Infos wie man das macht? (Oder ein Image einer VM) bzw. Projektdaten? Oder gleich Binarys!? Anscheinend hat TomTom selbst das früher auf RedHat-Linux kompiliert... Das konnte ich mir lediglich zusammenreimen - es wird nirgendwo erwähnt. Leider wurden alle fertigen Kernel und APP Binarys vom Netz verbannt. Und die wenigen die ich finde funktionieren nicht - bzw. brauchen noch patches vorm kompilieren (Wegen Modell-Eigenheiten). Kann jemand ein paar Infos insbesondere wegen Kompilieren beisteuern? Board-Info Config!? Welcher Unterbau oder Distri dafür am besten geht!? Mein End-Ziel ist es, die Dinger als Bluetooth Fernbedienung fürn Raspberry IoT und Kodi zu benutzen - was von den Gegebenheiten (HW/SW) her ja "locker" machbar wäre. Die bekommt man für 1-25€ auf Ebay - finde ich ganz OK als ARM FB DevPlattform. (Fast besser als die Betty) Und Infrarot bekommt man bestimmt auch noch an einen der UARTs dran (RX/TX) Aber ich bekomme noch nicht mal ein Linux Kernel zusammen. Ich hab hunderte dependencys installiert - aber die beschriebenen Make-Aufrufe funktionieren nicht. Ab Kernel V2.6.13 gehts los. Sollte ich eine Linux-Distri mit ähnlich altem Kernel zum kompilieren benutzen? Oder lohnt es sich, das auf dem Raspberry zu kompilieren, da die Aktion dann nicht ganz so "cross" wird!?. (Ist ja auch ARM) Da es hier "sowas" ja schon öfter gab, frag ich ob vielleicht jemand was in seinen Backups "aufgehoben" hat, oder mir ein paar Tipps dazu geben kann. Gruß, tsx
:
Bearbeitet durch User
Ich hab hier auch noch ein altes Tom Tom Navi rumliegen was noch Tadellos läuft. Nur es gibt keine Kartenupdates mehr dafür. Ich hatte auch schon mal danach gesucht aber das Projekt scheint mehr als Tod zu sein. Wäre aber denn noch interessant wenn man das Projekt wieder neu auflegt. So mal es mittlerweile Leistungsfähigere Navis gibt die das Supportende erreicht haben.
Michael M. schrieb: > Wäre aber denn noch interessant wenn man das Projekt wieder neu auflegt. Das geht vielen so. Ich hab mich informiert und ein Haufen drüber gelesen. > So mal es mittlerweile Leistungsfähigere Navis gibt die das Supportende > erreicht haben. Leider ja - Aber das [Fork?] würde ich auf jeden Fall voll unterstützen! Die HW ist ja voll in Ordnung für solche [IoT] Spielereien! Bis auf der Akku - meist. Da sollte man mal drüber schauen. Meine Li-ion sind fast doppelt so dick geworden. (TomTom One V1-V3 läuft auch ohne Akku an USB 5V)
:
Bearbeitet durch User
Hat mal jemand bei TomTom gefragt ob es eine möglichkeit der nachnutzung gibt? Ansonsten müsste man wenn die nicht wollen selber reversen. Das heisst Navi öffnen und auf der Platine nach Seriellen oder Jtag Schnittstellen suchen und schauen ob man da eine Konsole bekommt. Einige neuere Navis haben bereis Bluetooth und auch W-Lan.
:
Bearbeitet durch User
Angehängte Dateien:
-

VielleichtHierStarten.png
2,8 KB
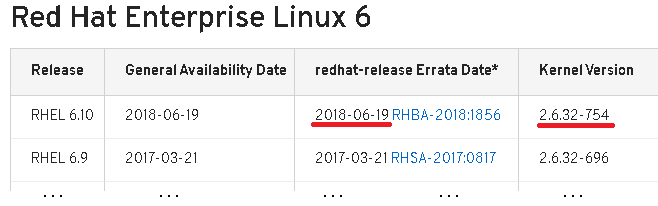
Ist das richtig dass dieses vier Monate alte Release einen dieser 2.6er Kernel (immer noch!?) nutzt? Das ist ja fast neu und trotzdem Steinzeit. Oder wie soll man das sehen!? Kann man ggf was damit anfangen!?
Angehängte Dateien:
-

Compare.png
19 KB
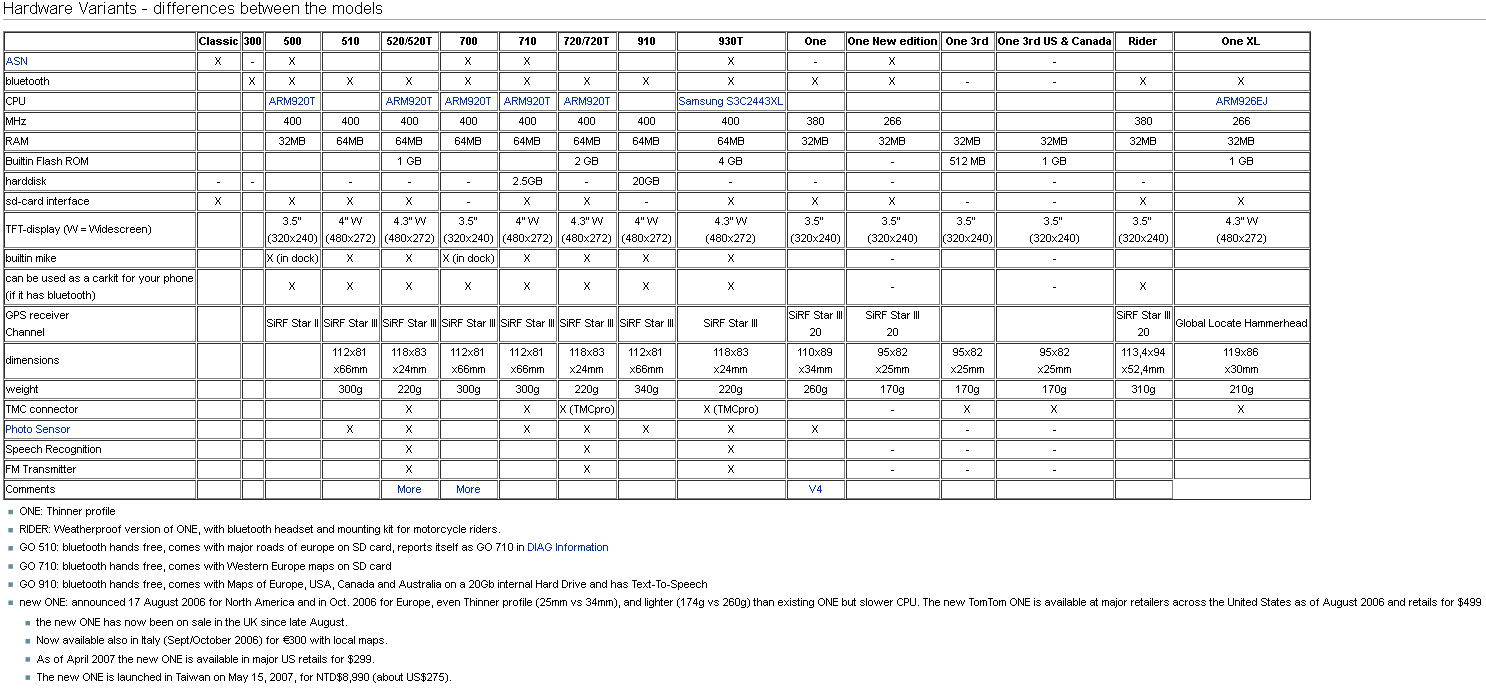
Die Pin-Leisten unten am Gerät sind bekannt (Pinout bei den älteren Geräten) - da gibts soweit ich weiß immer ne Serielle und sogar Jtag + manchmal Audio. Die neueren haben alle USB und Versions-Spezifische Sachen. [Manche mit Klinkenbuchse - andere stattdessen einen SD-Slot, blah...] Man sollte das nochmal zusammentragen. Und ggf so ein Witzzard-Paket wie bei Freetz! (was ja auch fast tot ist) schnüren.
Tim S. schrieb: > Ist das richtig dass dieses vier Monate alte Release einen dieser 2.6er > Kernel (immer noch!?) nutzt? Na klar. Das ist ein Long-Term-Stable-System, was bis Ende 2020 supported wird. Die Kernel-Major-Releasenummer und vor allem das ABI bleiben gleich. Aber dennoch hat Redhat da massiv Aufwand in Backports von neueren Features gesteckt. Das ist ja gerade der Mehrwehrt solcher LTS-Releases. > Kann man ggf was damit anfangen!? Der Kernel des Buildsystems hat so gut wie keinen Einfluss, viel spannender ist die verwendete Toolchain, also Crosscompiler und Bibliotheken für den.
:
Bearbeitet durch User
Tim S. schrieb: > Kann man ggf was damit anfangen!? Gerd E. schrieb: > also Crosscompiler und Bibliotheken Ich frag ja wegen der Kompatibilität der Bibliotheken [zueinander, zum OS und zum Compiler - zur HW] Da gabs ja immer wieder Änderungen, welche dann Versions-Konflikte verursacht haben. Systemd zu Initd und whatever next... Ich häng grad beim Kernel-Kompilieren fest [auf Ubuntu Mate x64] und hab die Bibliotheken Sources mit den Änderungen von TomTom benutzt. Jetzt mach ich aber besser erst nochmal ein paar "ARM-HelloWorld(s)" um den Crosscompiler zu testen. Irgendwo klemmt es wohl noch ^^
:
Bearbeitet durch User
Das alleine geht leider nicht mehr. Das hab ich als erstes versucht. Da steht auch bestimmt am meisten drinnen. Ist auch gut gemacht mit get_cross_env.sh usw. Nur das Roh zu kompilieren ist ne Krankheit, weil viele Pakete hinterher runtergeladen werden, und - wie so oft - die Source wieder offline oder moved ist und das ganze natürlich hunderte mal komplett abbricht. Die Sourcen hab ich aber jetzt alle über Wayback oder kompatible "Base"-Versionen runtergeladen. Man muss sich da Ransetzten und es wohl nochmal komplett manuell zusammenbasteln. (Drum frag ich nach nem Backup!) Und unter Ubuntu (wie beschrieben) gehts bei mir (noch) nicht.
:
Bearbeitet durch User
Vom Alter her scheinen die benötigten Dateien alle zwischen LFS 5.0 und LFS 6.0 zu liegen. Damit ist auch eine schöne Bauanleitung vorhanden. Leider ist die älteste verfügbare Version dort die 6.0. Müsste man eine 5.x suchen. Dann hat man dann auch ein schönes kleines Linux.
Michael M. schrieb: > Hat mal jemand bei TomTom gefragt ob es eine möglichkeit der nachnutzung > gibt? Du kannst das Teil als elektronischen Bilderrahmen verwenden. Ich habe auch zwei jetzt wertlose Geräte, für die es keine Updates mehr gibt.
:
Bearbeitet durch User
Tim S. schrieb: > das Roh zu kompilieren ist ne Krankheit, weil > viele Pakete hinterher runtergeladen werden, Ich habs nochmal versucht, und bis auf paar Sachen von den Google-Servern ist alles noch bzw. wieder online! Da war zu meinem Zeitpunkt des Ladens wohl irgendwass im Gange was dies verhindert hat. Ein ähnliches Release wie in deinem Link gibt es hier: http://opentom.free.fr/index.php?title=Main_Page Naja ich häng immer noch fest und komm nicht weiter. Ganz banale Sachen. Die Shell oder Make kann den "arm-linux-gcc" nicht aufrufen usw. "whereis arm-linux-gcc" findet es aber. Ich setz grad nochmal alles neu auf, und wenns wieder nicht geht versuch ich mal das RedHat. Andreas M. schrieb: > Du kannst das Teil als elektronischen Bilderrahmen verwenden. > > Ich habe auch zwei jetzt wertlose Geräte, > für die es keine Updates mehr gibt. Ich geb so schnell noch nicht auf. Als Navi hatten die bereits ihre beste Zeit hinter sich. Die wären mir mittlerweile wohl auch zu langsam und zu abhänig von propertary-Karten geworden. Aber für Bastelein sind die sicher noch Top! Nur als Bilderrahmen ist es dann auch fast wieder verschwendet...
GUTEN MORGEN! Ohmann das geht unter Ubuntu x64 natürlich nicht, wenn die Toolchain als 32Bit Binary fertig kommt ... Gruß, tsx
Tim S. schrieb: > Naja ich häng immer noch fest und komm nicht weiter. Ich habe im ganzen Thread nicht erkennen können, was du eigentlich bezwecken willst: a) willst du lediglich das in den Navis enthaltene Mini-Linux benutzen, also dir anstelle der Navi-Software deine eigenen Apps dort draufspielen und benutzen? oder b) dir dein eigenes Linux zusammensetzen und damit das in den Geräten vorhandene Zeugs komplett ersetzen? Im Falle a) müßtest du ja eigentlich zu allererst zusehen, irgendwie an die beim Booten verwendeten Skripte heranzukommen oder sonst irgendwie auf den Kommandoprompt zu kommen. Im Falle b) müßtest du stattdessen die Schaltung aufnehmen und dir Unterlagen zum verwendeten Controller zu beschaffen, denn das Anpassen der Lowlevel-Seite eines OS an die Hardware kriegst du nur hin, wenn du selbige kennst. Wir hatten hier vor Jahren mal sowas ähnliches in Form einer 5 Euro Set-Top-Box von Pollin, die ursprünglich für Bezahlfernsehen gedacht war. Siehe: http://thinksilicon.de/59/Die-VIP1710-als-Internetradio.html und https://hilses.de/vip1710/ Vielleicht kannst du dort dir einige Anregungen holen. W.S.
Andreas M. schrieb: > Ich habe auch zwei jetzt wertlose Geräte, > für die es keine Updates mehr gibt. also ich habe auch alte Navis. wenn da irgendwo mal ein Kreisverkehr dazu kommt, eine Umgehungsstrecke um einen Ort gebaut wird oder mal eine Einbahnstrasse umgedreht wird... Seid Ihr dann aufgeschmissen? verfahrt Ihr Euch dann?
Fall b) Aber ich lass den vorhandenen Bootloader drauf, und werde noch kein u-boot benutzen. Man muss den Kernel dann aber Singnieren. Die Datei "ttsystem" wird dann angesprungen. Auszug: Die weitergehende Analyse des Bootloaders mittels Disassembler führt zum Blowfish-Key: d8 88 d3 13 ed 83 ba ad 9c f4 1b 50 b3 43 fa dd Mit diesem Schlüssel signierte Images werden vom TomTom- Bootloader akzeptiert. [...] == initrd[?] Dazu reicht wohl eine kleine FAT32 Partition am Anfang neben dem ExtFS dahinter. Das soll angeblich für die ONE und GO Serie zutreffen. So weit bin ich aber noch nicht. W.S. schrieb: > denn das Anpassen > der Lowlevel-Seite eines OS an die Hardware kriegst du nur hin, wenn du > selbige kennst. Drum gibts ja die Diffs und Patches. Ich häng jetzt bei microwin/drivers kompilieren. Da sind Framebuffer und Touchscreen driver drinnen. TomTom Pointer-Device (Touch) ist da auch schon dabei. Ich weiß bloß grad nicht wie man die Auflösung einstellt. Ob 240x320 oder 320x240 Orientierung gebraucht wird. W.S. schrieb: > Wir hatten hier vor Jahren mal sowas ähnliches in Form einer 5 Euro > Set-Top-Box von Pollin, die ursprünglich für Bezahlfernsehen gedacht > war. Ich hab beim Medion PNX/NXP still und leise mit gemacht. Hier ist nochmal ne ähnliche Source: https://github.com/navit-gps/NavitTom
:
Bearbeitet durch User
Ich hab da selber mal ein wenig mit Google gesucht. Allerdings ist da sehr viel Offline. :( Hat da schon mal jemand bei Tom Tom direkt gefragt wegen der nachnutzung? Ist schon schade wenn man ein komplett funktionierendes Gerät so wegscheissen kann nur weil es keine Updates mehr gibt.
Michael M. schrieb: > Ist schon schade wenn man ein komplett funktionierendes Gerät so > wegschMeissen kann nur weil es keine Updates mehr gibt. Naja mit der Zeit wurde manche Betriebssystem-SW auch speicherhungriger und ein zu langsames Navi, was NACH der Kreuzung erst sagte, dasss man vorher abbiegen sollte, ist nicht der Idealfall?
Mir geht es mehr um eine nachnutzung des Navis. Ich hab hier noch ein Go920 liegen was ich für Open Tom nutzen wollte. Aber so wie es aussieht kann man das wohl knicken.
Hallo tsx, 4 Jahre sind vergangen, es sei gestattet nachzufragen. Hast Du ein eigenes Linux auf Dein TomTom ONE Navigationsgeräte installiert bekommen? Falls ja, gibt es nähere Informationen dazu? Ich frage, da ich ein TomTom ONE XL geschenk bekommen habe. Mit freundlichen Grüßen Guido
Hallo, nein die Dinger liegen noch herum. Es ist irgendwo ganz hinten im 'ToDo' gelandet. Es scheiterte mir damals an der "Toolchain" und ich hatte nur Chaos. Die ganzen Sources und Abhängigkeiten zusammentragen war Stundenlange Arbeit - WayBackMachine und Archive.org Durchgraben - und am Ende hat immer noch irgend etwas gefehlt, oder es war zu neu oder zu alt... Und ganz ehrlich war ich noch nicht so fit in EmbeddedLinux. Ein Komplettpaket mit Build-Fähigen Sources habe ich nicht gefunden. Von daher ist es fast vergessen, da zu aufwendig nochmal in das Arch- und Board ReverseEngineering einzusteigen. Ja echt schade eigentlich.... Mit einem ganz alten Linux, oder das oben genannte Redhat geht es wahrscheinlich. Habe die gesammelten Sourcen aber wegen Plattenausfall nicht mehr :-( Und das Thema wurde dann wegen Raspberry und Co schnell uninteressant. Aber es ist noch nicht ganz vergessen. (Die GPS Empfänger auf dem Board kann man wohl nicht mehr benutzen - da hatte sich ja irgenwas am Standard geändert wegen einem Überlauf weiß nicht genau. Dafür gibt's dann noch nen UART.) Ich hab mich seitdem nicht mehr ernsthaft damit beschäftigt. Wenn das jemand schafft ein Image zu bauen dann gerne her mit allen Infos.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.