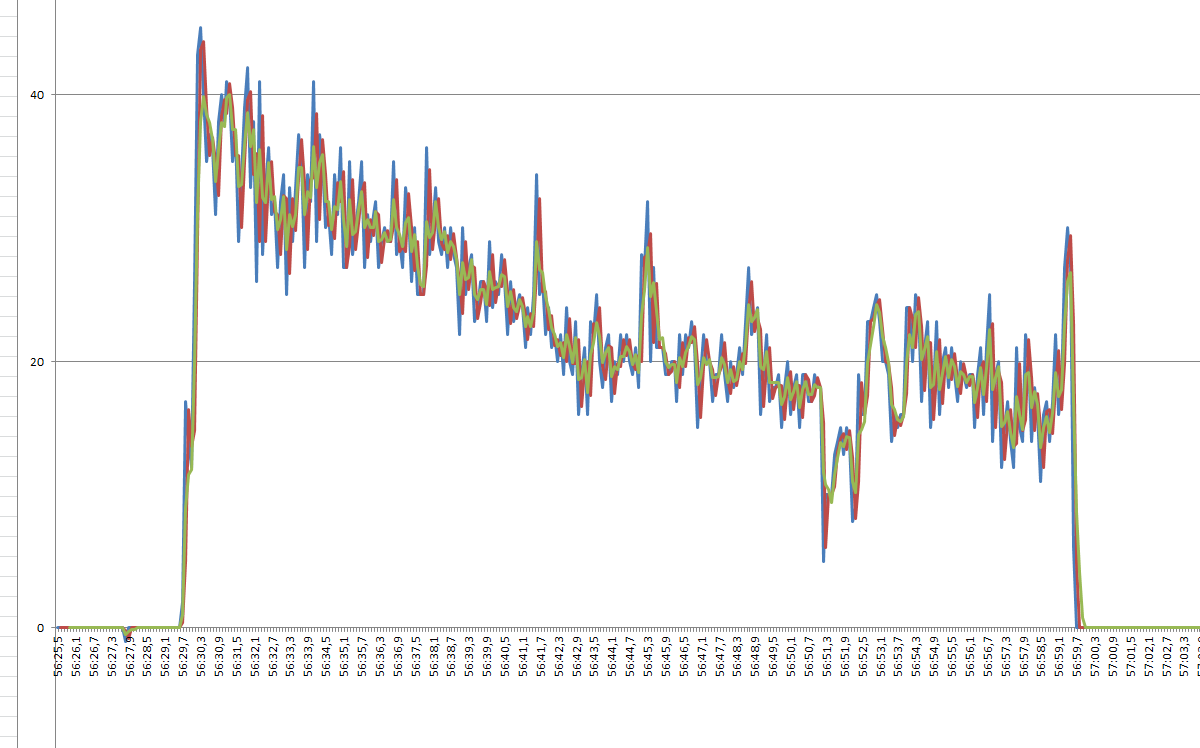
Hallo, ich hole kurz aus: Ich hab einen Schiebetorantrieb mit Steuerung und Funk-FB. (Wissniowski) Um diesen an meine Hausautomatsierung zu bekommen, hab ich mir was gebastelt und hole mir den Status der Endschalter und steuere über die Kontakte für externe Taster. Um festzustellen, ob sich das Tor bewegt bzw. in welche Richtung, messe ich den Motorstrom. Ich wollte keine zusätzlichen Sensoren verbauen. Der Motor ist ein 24V DC Motor, wohl ein LKW Scheibenwischermotor. In der Steuerung ist ein 230V/24V Ringkerntrafo und geht mit 24V AC auf die Steuerung. Für den Motor wird aber wohl gleichgerichtet, denn in der Doku der Steuerung heißt es... "Motor des Gleichstroms von der Nennspannung 24V wo Nennstrom nicht 7,7A überschreitet (mit dem Kurzschlussschutz)" Ich verwende einen ACS712 um galvanisch getrennt per Halleffekt zu messen und wandle alle 100ms auf einen atmega 32u4 (Arduino Micro). Im Anhang sind 4 Öffnungs- und Schließvorgänge, Wert alle 100ms. Ich sehe komische Einbrüche und Schwankungen, wo keine sein sollten. Lediglich das letzte Drittel (der Zeit) fährt das Tor mit halber Geschwindigkeit. Das müsste man eigtl. sehen. Eine Fahrt dauert ca. 30s, also 300Samples. Leider hab ich kein Oszi, mit dem ich das Messen könnte. Mein Verdacht geht in die Richtung das die Gleichrichtung evtl nicht ordentlich gemacht wird. Da ich mit 100ms bei 1/5 der Netzfrequenz bin, könnte es sein dass ich immer an einem bestimmen Punkt des Sinus messe, der aber driftet weil es eben nicht exakt 100ms sind?! a) Ist das Plausibel? Eigentlich kann der Sensor ja AC. b) Was wäre die Lösung? Einfach öfter sampeln? Wandlung dauert 100µs.. Alle 2ms könnte drin sein. Oder würde es reichen einen "krummen" Wert wie z.B. 7ms zu nehmen (und zu mitteln/glätten) Ich möchte nicht wild drauf los probieren, weil ich dazu meinen µc jedesmal aus dem Antrieb ausbauen muss, wasserdicht verbaut und so...
Was hast du denn erwartet, etwa eine glatte Linie? Dein Ergebnis sieht ganz normal aus.
Falls dir das nicht sauber genug ist, ergänze einfach einen Tiefpass.
Sir S. schrieb: > Da ich mit 100ms bei 1/5 der Netzfrequenz bin, > könnte es sein dass ich immer an einem bestimmen Punkt des Sinus messe, > der aber driftet weil es eben nicht exakt 100ms sind?! ja sieht auch so aus als würdest du einen Wechselstrom messen
Sir S. schrieb: > Für den Motor wird aber wohl gleichgerichtet, Jetzt überlege mal, wie der Spannungsverlauf hinter dem Gleichtichter ist? Ja, es ist eine pulsierende Spannung zwischen 0 und ca. 33 Volt: https://www.elektronik-kompendium.de/sites/slt/1807181.htm Du bekomst also zufällig einen Stromwert zwischen Null und Maximum, je nachdem, wann Du gerade abtastest. Ich würde eine häufigere Messung anstreben und über einen längeren Zeitraum den Mittelwert bilden. Das Tor ist aus Sicht eines µC schnarchend langsam, ich würde alle 2ms messen und mir den Mittelwert aus 20 Messungen bilden, dann ist der Wert einigermaßen ruhig. Wenn die 2ms zu schnell sind, dann eben etwas langsamer ... Du hast Zeit. aldesser schrieb: > Falls dir das nicht sauber genug ist, ergänze einfach einen Tiefpass. Ja, den Tiefpass kann man in Software abbilden, siehe oben!
Manfred schrieb: > ich würde alle 2ms > messen ich würde auf jeden Fall öfter messen um das Nyquist-Kriterium zu erfüllen Manfred schrieb: > den Tiefpass kann man in Software abbilden ganz so einfach ist das leider nicht
Vielen Dank schonmal für die Hinweise. Natürlich habe ich keine glatte Linie erwartet, und ich habe bereits einen Tiefpass in Software realisiert. Für die Analyse habe ich aber die Rohdaten genutzt und dargestellt. Der Tiefpass hilft mir allerdings auch nicht weiter, wenn ich 5s lang keinen Strom messe, obowhl sich das Tor bewegt. Das Problem aktuell sind wirklich nur die echt langen Phasen wo ich praktisch nichts messe, obwohl das Tor läuft... manchmal ausgeprägter, manchmal weniger. Zur Verdeutlichung habe ich mal die Zeiten markiert, in denen sich das Tor öffnet bzw schließt (rote Rechtecke). Oval einige der problematischen Stellen. Ob ich 2ms hinbekomme muss ich mal sehen, es läuft noch der Busstack... @Manfred das wäre doch aber abhängig davon, wie gut oder schlecht die Gleichspannung gleichgerichtet ist, oder? Du unterstellst jetzt mal einen Diodengleichrichter ohne Glättung... was wohl worst case wäre.
kann ich den Analogwert hinter dem Wandler nicht so mit Hardware glätten, dass ich nicht mehr so oft abtasten muss?? Einfach ein C rein? Was wäre ein guter Wert?
Ja kannst du, der würde dein Signal aber auch ein bisschen verzögern.
1 | 10kΩ |
2 | |
3 | Signal o---[===]---+---o ADC |
4 | | |
5 | === 10µF |
6 | | |
7 | GND |
Angehängte Dateien:
-

Unbenannt.PNG
88 KB
Also ich sample jetzt alle 4ms und bilde alle 100ms ein arith. Mittel über 25 Werte. Diese Rohdaten weißen dann die Lücken aus dem Graph nicht mehr auf. Dann glätte ich ich mit smoothed = val/2+oldval1/4+oldval2/8+oldval3/8. Haut für meine Zwecke sehr gut hin!
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.