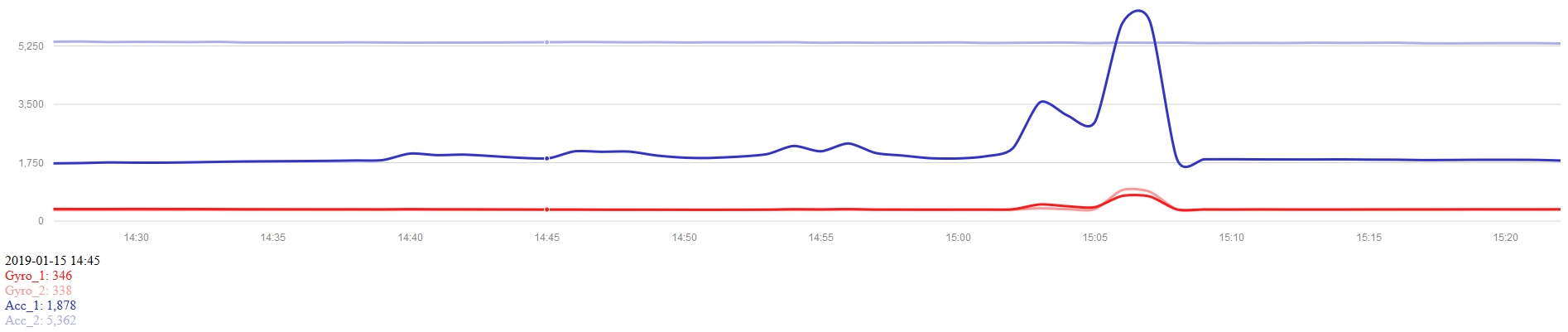
Hallo Wir haben im Keller zwei Waschmaschinen und zum Glück noch ein wenig WLAN. Also ESP8266 und pro WaMa einen Beschleunigungssensor (MCU 6050) und jede Minute die Mittelwerte der letzten 10 Sekunden auf eine Webseite schreiben. Waschgang, siehe Anhang (dunkel blaue Linie), 14:37 bis 15:07 So richtig eindeutig ist das jetzt aber noch nicht. Der Sensor ist in einem kleinen Gehäuse (m = ca 15g) an einem Silikonkabel frei schwingend an der Oberseite der WaMa befestigt. So sollte er sich maximal aufschaukeln können. Der erste Versuch mit dem auf dem Deckel der WaMa geklebten Sensor war noch viel schlechter. Fällt euch eine noch sensiblere Aufhängung ein?
Angehängte Dateien:
-

Wama_1.jpg
80 KB
Kolja L. schrieb: > Also ESP8266 und pro WaMa einen Beschleunigungssensor (MCU 6050) > und jede Minute die Mittelwerte der letzten 10 Sekunden auf eine > Webseite schreiben. Der Mittelwert einer Schwingung ist 0! Vieleicht besser den Mittelwert der Quadrate oder der Beträge nehmen.
Mist, vergessen zu schreiben, es sind die Beträge der Mittelwerte.
Abtastrate? Ich hab nur MPU 6050 gefunden ... 500Hz bis 1kHz Abtastrate Hochpass 0.2Hz (IIR) (der Sensor ist DC fähig) und RMS aller drei Achsen. Hinten an die Rückwand schrauben/kleben. Gruß Henrik
Henrik V. schrieb: > Ich hab nur MPU 6050 gefunden ... Richtig :-) Henrik V. schrieb: > 500Hz bis 1kHz Abtastrate > > Hochpass 0.2Hz (IIR) (der Sensor ist DC fähig) Verstehe ich noch nicht, hier mein Code:
1 | void messung() { |
2 | sum_g_1 = 0; |
3 | sum_g_2 = 0; |
4 | sum_a_1 = 0; |
5 | sum_a_2 = 0; |
6 | |
7 | for (int i = 0; i < 500; i++) { |
8 | mpu_1.getMotion6(&ax, &ay, &az, &gx, &gy, &gz); |
9 | g_1 = pow(gx, 2) + pow(gy, 2) + pow(gz, 2); |
10 | a_1 = pow(ax, 2) + pow(ay, 2) + pow(az, 2); |
11 | sum_g_1 = sum_g_1 + g_1; |
12 | sum_a_1 = sum_a_1 + a_1; |
13 | |
14 | mpu_2.getMotion6(&ax, &ay, &az, &gx, &gy, &gz); |
15 | g_2 = pow(gx, 2) + pow(gy, 2) + pow(gz, 2); |
16 | a_2 = pow(ax, 2) + pow(ay, 2) + pow(az, 2); |
17 | sum_g_2 = sum_g_2 + g_2; |
18 | sum_a_2 = sum_a_2 + a_2; |
19 | |
20 | delay(20); |
21 | }
|
22 | g_1 = sum_g_1 / 500; |
23 | g_2 = sum_g_2 / 500; |
24 | a_1 = sum_a_1 / 500; |
25 | a_2 = sum_a_2 / 500; |
26 | }
|
Änderung zum Code, der die obige Grafik erzeugt hat: pow() statt abs(). Testwaschgang läuft gerade. Henrik V. schrieb: > RMS aller drei > Achsen. Gute Idee! Wenn ich mich recht an Mathe1 erinnere werden beim Quadratischenmittelwert die Ausschläge besser berücksichtigt.
Henrik V. schrieb: > Hinten an die Rückwand schrauben/kleben. Das war ja der erste Versuch, aber dabei gab es kaum Ausschläge. Daher meine "Freischwinger" Variante.
Was ist eigentlich das Ziel? Willst du wissen wann die Maschine fertig ist?
Ja, aber gerne mit der überflüssigen Spielerei, dass die Vibrationen des Waschvorgangs graphisch abgebildet werden. Einfacher wäre es mit nem Hallsensor...
Beitrag #5697408 wurde von einem Moderator gelöscht.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.