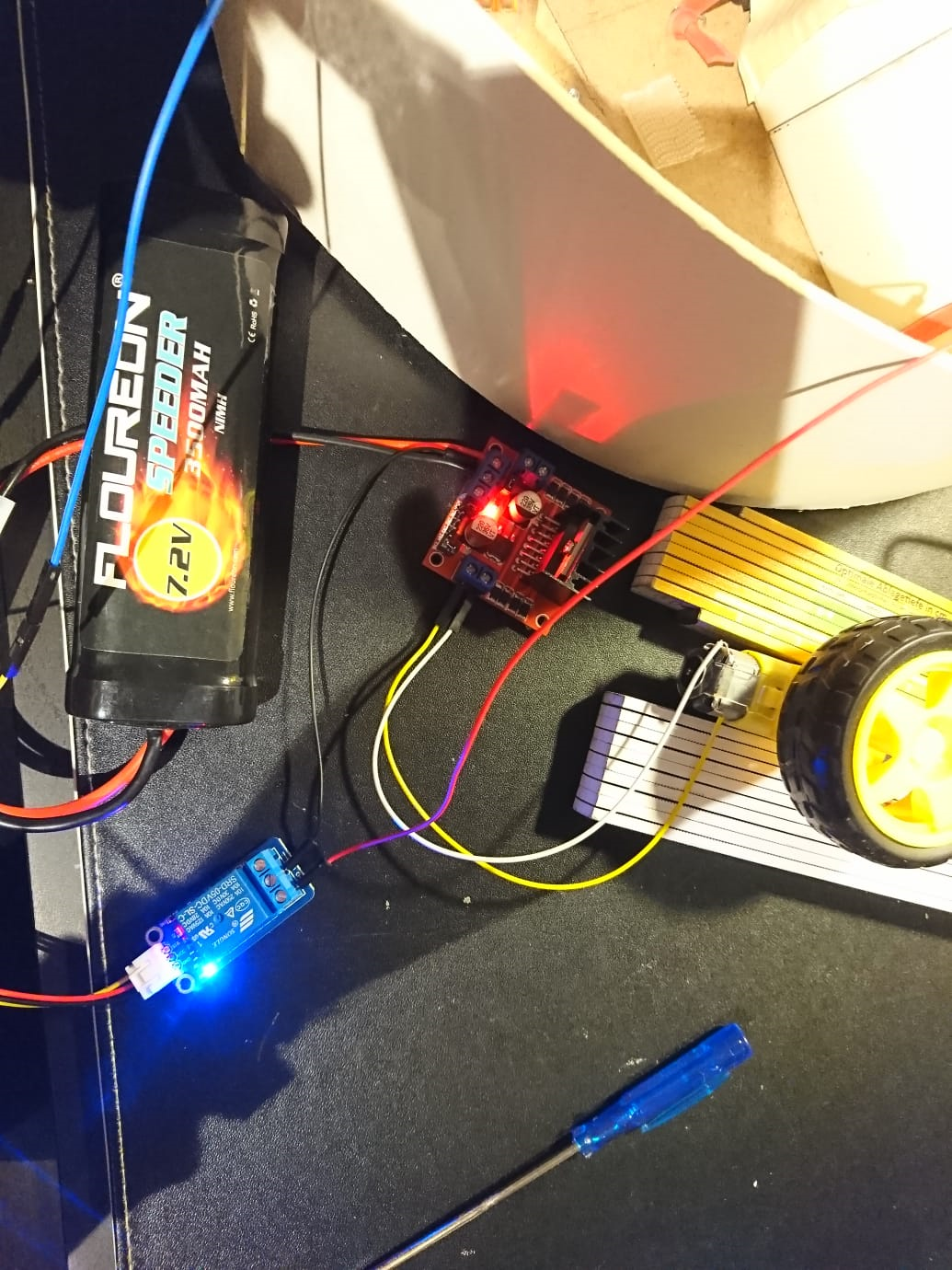
Hallo Leute, Für ein Schulprojekt baue ich einen Staubsaugerroboter. Sensoren, Bürste und Sauger läuft alles schon tadellos. Leider habe ich jetzt Probleme den Roboter zum fahren zu bringen. Verbaut sind diese Motoren: https://www.amazon.de/Motor-Smart-Chassis-Roboter-Getriebemotor/dp/B00QHENMNU?tag=psblog-21 Mit den Relais betreibe ich die Motoren momentan,aber eben nur im Vorwährtsgang und ausschalten kann ich sie noch. Mit diesen Relais habe ich kein Problem: https://www.roboter-bausatz.de…level-trigger-einstellbar Jetzt möchte ich die Motoren noch drehrichtungsumkehrbar schalten können. Dazu habe ich die Folgende H-Brücke gekauft. Motorsteuerrelai L9110: https://www.amazon.de/Baoblaze-Doppeltes-Motortreiber-Kontroller-Schaltplatte-multifarbe/dp/B00NOVAORQ/ref=sr_1_23?__mk_de_DE=%C3%85M%C3%85%C5%BD%C3%95%C3%91&keywords=L9110&qid=1558997648&s=computers&sr=1-23&tag=psblog-21 Ab jetzt gehen die Probleme los: Ich schaffe es nicht, dass das Relai schaltet. Die Arbeitsspannung beträgt 7,2V. VCC an +7,2V und GND an 0V. AN OA1, OB1 hängen die zwei kabel, die zum Motor gehen. Analog dazu der andere Motor an OA2, OB2. Ich werde mit Fritzing noch ein Bild erstellen, aber es sollte auch schon so nachvollziehbar sein. 1B1, 1A1, 1B2, 1A2 gehen jeweils direkt auf einen GPIO des Raspberry Pi's 3. An diesem GPIO sollten jeweils 3,3V ausgegeben werden, diese werden auch ausgegeben. Die Beschaltung der GPIO schaut recht einfach aus, 1B1 auf HIGH 1A1 auf LOW 1B2 auf HIGH 1A2 auf LOW. So sollten die Motoren vorwährts drehen, dies geht aber nicht. Dann hab ich begonnen mit dem Multimeter zu messen. Ich habe die Motoren und die GPIOS abgeklemmt und nur das Relai an die 7,2V und 0V angeschlossen. Am Relai kann ich jetzt zwischen GND und 1B1, 1A1 jeweils 3,8V messen und zwischen 1B2, 1A2 und GND sogar die vollen 7,2V. Dies verwirrt mich jetzt, wenn jetzt ein GPIO noch Spannung drauf gibt ,kann das Relai ja nicht definiert schalten ?! Mache ich was falsch oder ist meine H-Brücke defekt, (diese schaltet ja anscheinend intern Spannung auf die GPIO anschlüsse) Danke schon mal MFG
Du und Fritzchen, Ihr solltet euch besser 'ran halten bzgl. der Schaltschemata. (Mehrzahl, weil mit Aufspaltung auf Teilbereiche alles übersichtlicher ist.) Vor denen, allein durch die wörtliche Beschreibung, wird man nur schwerlich schlauer werden. Hilfe also praktisch unmöglich. (Schemata sind übrigens nicht erst bei Problemlösung / Ratsuche nützlich - normalerweise kommt das zuerst ... der Zusammenbau danach ...mittels sauberer Schemata senkt man die Fehlerquote. Nur, wenn Schaltungen geradezu lachhaft einfach sind [und ich deshalb sehr sicher bin, daß es ohne geht], mach ich keine. Hier (bei Dir) sicher nicht der Fall. Nun liegt das Kind zwar schon im Brunnen, aber hol es zumindest nach, und lade sie hoch.)
Alle Saugroboter, die mir so untergekommen sind, fahren die Motoren über eine Regelschleife, dafür sind die Radsensoren da. Wenn man das nicht macht, sind selbst geringste Unterschiede der Motoren die Ursache für schlechten Geradeauslauf. Man sollte also die Motoren mit Halbleitern und PWM ansteuern, weil man sie sonst nicht in den Griff bekommt. Ausserdem schädigt hartes Einschalten und Abstoppen der Motoren die ohnehin schwachen Plasikzahnräder. Ich habe das damals bei meinem Linuxrobbi als Treiber programmiert, aber ich habe keine Ahnung, ob das beim RPi auch so geht wie auf dem uCSimm. Jonas Roßkopf schrieb: > (diese schaltet ja > anscheinend intern Spannung auf die GPIO anschlüsse) Vorsicht bei so etwas. Die GPIO gehen direkt ins Herz des Prozessors und ein erzwungener Strom in die CPU kann zur Zerstörung führen, die GPIOs des RPi sind bekannt schwach.
Angehängte Dateien:
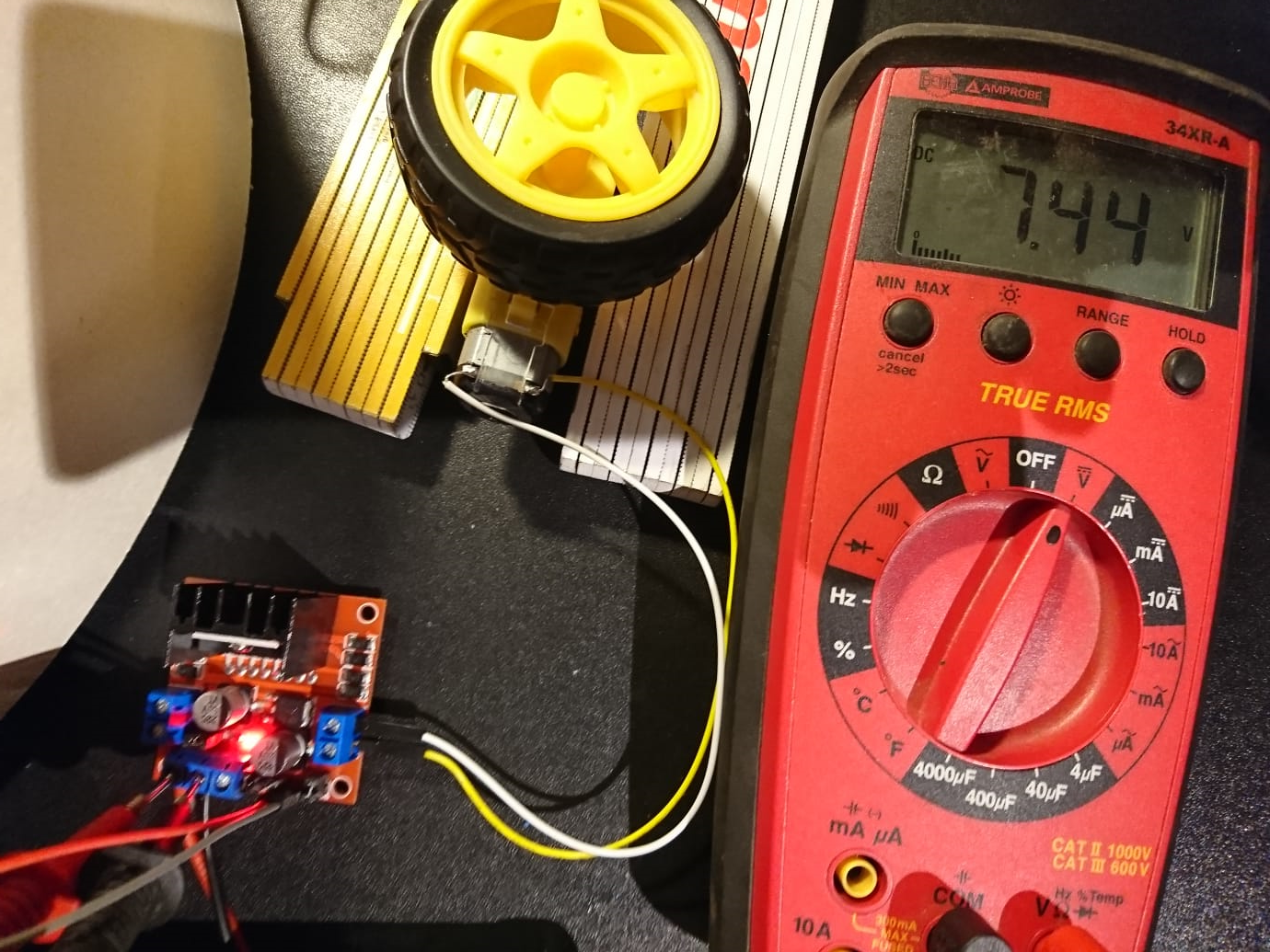
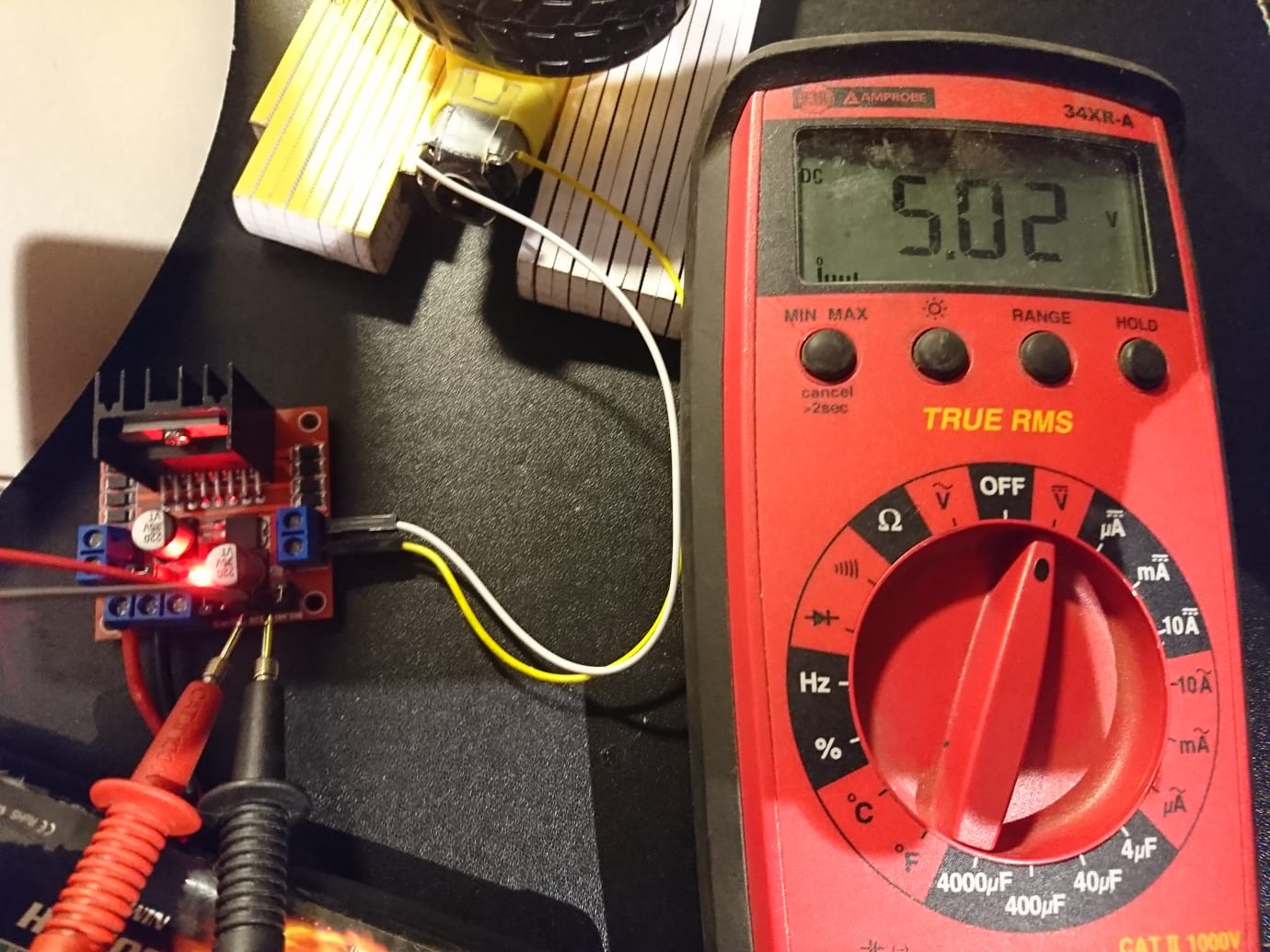
So ich habe heute noch einmal eine andere und neue H-Brücke in Betrieb genommen. Mit der komm ich besser klar und wenn sie an Spannung angeschlossen ist, sind die IN1,2,3,4 immer noch Spannungsfrei. Neue H-Brücke L298N: https://www.amazon.de/MUZOCT-Motorantrieb-Controller-Stepper-Arduino/dp/B075SXWKGD/ref=sr_1_2_sspa?__mk_de_DE=%C3%85M%C3%85%C5%BD%C3%95%C3%91&keywords=H-Br%C3%BCcke&qid=1559082359&s=gateway&sr=8-2-spons&psc=1&smid=A279NJMYLGQ7P7 Ich habe noch Bilder angehängt auf denen Ihr halbwegs sehen könnt, wie ich Messe und wie verkabelt ist. Folgende Erfahrungen hab ich eben gesammelt: Wenn ich IN3 an +5V und IN4 an 0V (nicht GPIO, sondern direkt die Dauerspannungen) vom Raspberry PI anschließe oder auch anderst rum, tut sich gar nichts . Wenn ich den Motor direkt an den Raspi anschließe mit 5V und 0V dreht er sich, wenn auch langsam. Wenn ich IN3 und IN4 an die 7,2 Volt vom Akkupack klemme, läuft der Motor über die H-Brücke wunderbar!!! Dies hat mich auf die Idee gebracht die H-Brücke über ein separates Relai zu schalten, dies hat auch funktioniert. Meine Vermutung wäre an dieser Stelle, dass der Raspi nicht genügen Strom ausgeben kann um die H-Brücke zu schalten. Es laufen bereits 10 Sensoren und zwei Relais, sowie ein Touchschalter über den Raspi. Der Theorie widerspricht jedoch, dass die Motoren direkt am Raspi angeschlossen sich sogar drehen. Und außerdem kann ich die einfachen, blauen Relais immernoch ganz normal mit dem Raspi schalten. Brauchen die blauen Relais weniger Strom zum schalten wie die H-Brücke? Mach ich generell irgendetwas falsch? Um die H-Brücke mit den blauen Relais zu schalten, würde ich insgesamt noch 4 zusätzlich Relais benötigen. Dies ist hoffentlich nicht die einfachste Lösung. Angenommen die H-Brücke schaltet wirklich nicht, weil der Raspi ausgelastet ist, würde es noch die Möglichkeit geben einen zweiten Raspberry zu verwenden, der dann nur die H-Brücke schaltet. (In der Schule gäbe es noch ohne Probleme einen). Was sagt ihr dazu? Danke für eure Mühe :)
Angehängte Dateien:
-

7_2V_versorgungsspannung.png
1,6 MB -

5V_von_raspi.png
1,5 MB
Hier noch zwei Bilder.... Ich find die Beitrag bearbeiten Funktion nicht...
Sei doch bitte mal so nett und zeichne einen Schaltplan deiner Konstruktion. So haben wir doch bessere Chancen, deine Verkabelung zu verstehen als mit den etwas verwirrenden Fotos. Eines ist jedoch immer klar: die Peripherie, die vom RPi geschaltet wird, muss 3,3V-Logik kompatibel sein und darf an den Steuereingängen nur sehr kleine Ströme ziehen, damit die GPIOs nicht überlastet werden. Ein Relais benötigt also einen Steuertransistor und eine H-Brücke muss mit 3,3V an den Eingängen klarkommen und den Pegel sicher erkennen. Das ist nun mal eine Eigenart des RPi, seine Versorgung ist 3,3V und nur das kann er auch als high am GPIO ausgeben.
Also es läuft jetzt alles, ich hatte die 0V der Arbeitsspannung nicht mit den 0V der Raspberrys verbunden.. Vielen Dank!!
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.