Gegeben ist eine fortwährend einlaufende Datenmenge von Y und X Werten ungenau gemessener Positionen, die interpoliert werden wollen. Wie geht das am einfachsten? Die Werte X und Y sind nicht durch R und PHI darstellbar, bzw. sie verhalten sich nicht so. Die Zeiten sind nicht im gleichen Abstand, es kommen also z.B. 5 - 10 Werte die Sekunde, es gibt Lücken. Geradeninterpolation zwischen den letzten bekannten Werten ist vollkommen nutzlos. Splines wären rechentechnisch möglich, zeichnen aber die Wege zu genau nach. Ich benötige eine einfache Methode, um sagen wir 10 Werte um den aktuellen Punkt (+/- 1 Meter) zu glätten, Messfehler zu verwerfen und dann die Position mit Punkten zu interpolieren.
Kannst so z.B. interpoliert werden: NeuerWert = ((NeuerWert - AlterWert) >> 3) + AlterWert; Schieben um eine Stelle entspricht Wert / 2.
Angehängte Dateien:
-

way.gif
14 KB
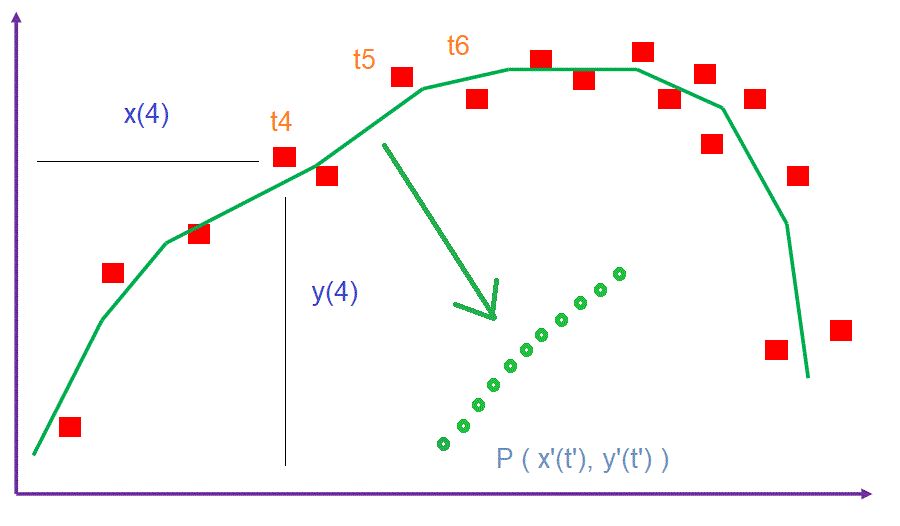
Hier ist das veranschaulicht: Es kommen mal wenige und mal viele Werte pro Zeiteinheit. Herauskommen soll eine feiner aufgelöste Wertemenge X'Y' mit wählbarem zeitlichen Abstand. Im ersten Schritt reicht eine Interpolation auf feste zeitliche Werte. Im Eindimensionalen hätte ich einfach die Y, die zur Verfügung stehen (variierende Anzahl) je nach Abstand zum Betrachtungszeitpunkt gewichtet und das in eine Dezimation geworfen, mit gfs einem CIC-Aufwärts-Interpolator. Im 2D fehlt dazu aber ersteinmal der Bezug, da X und t nicht equidistant sind.
Angehängte Dateien:
-

PathApproximation.png
1,3 KB

Du schreibst im ersten Beitrag von zu interpolierenden Punkten, später aber in der Zeichnung deutest du per grüner Linie und Punkten eine Approximation an. Da die Interpolation der roten Punkte deiner Zeichnung kaum Sinn machen würde, nehme ich mal an, du willst approximieren (=> grüne Linie), und zwar so, dass die Beschreibung eine zeitäquidistante Darstellung über den gesamten Bereich erlaubt. Das habe ich fast so schon gemacht, siehe Skizze. Dazu habe ich jeweils z.B. 10 fortlaufende Punkte zusammengefasst und per Bestapproximation z.B. durch eine kubische Bezier-Linie approximiert. Wenn man zwei dieser Kurven über den Punkten p(k)..p(k+9) bzw. p(k+1)..p(k+10) in den überlagernden Bereichen (überlagernd bzgl. der Zeiten) ineinander übergehen lässt (genauso wie bei Bezierkurven nach Beziersplines), dann erhält man eine gute Approximation. (in der Skizze sind die roten Punkte die gemessenen, die dunkelgrauen die berechneten Punkte, man erkennt gut die zeitliche Äquidistanz)
Richtig, es ist faktisch eine Approximation, weil die Messwerte unsicher sind. Die Interpolation bezieht sich auf die virtuellen (sozusagen entrauschten) Punkte. Die Approximation erledigt damit das Entrauschen. Sigi schrieb: > Dazu habe ich jeweils z.B. 10 fortlaufende Punkte > zusammengefasst Das wird in meinem Fall schwierig, weil die 10 Punkte manchmal eine große und manchmal eine sehr geringe Distanz umfassen. Ich brauche also eine Vorschrift für die Distanz mit unterschiedlichen Mengen von Punkten. Also z.B. so: 000000000011111111112222222222 123456789012345678901234567890 *..........*.**..*....*.**.... von 1 bis 16 wären 4 Punkte drin von 5 bis 20 wären 7 Punkte drin Ich bräuche also gleitende Übergänge zwischen gleitenden Interpolationskurven. Das sehe ich nicht, wie das mit Beziersplines gehen soll / kann.
Signalverarbeiter schrieb: > Im 2D fehlt dazu aber erst einmal der Bezug, da X und t nicht > equidistant sind. Im ersten Ansatz lasen sich die beiden Achsen getrennt interpolieren. Alles weitere erfordert Annahmen über das System, dessen Trägheit, Reaktion auf Oberwellen. Mechanische Objekte lassen sich gut modellieren und als Filter für die hüpfenden Werte hernehmen. Mit etwas Geschick und Nachdenken auch entlang der Bewegungsachse. Dazu muss das jeweilige Wegdifferential gebildet werden und die Krümmung abgeleitet werden. > Das wird in meinem Fall schwierig, weil die 10 Punkte manchmal eine > große und manchmal eine sehr geringe Distanz umfassen. Der Zeitpunkt muss natürlich als Parameter in die Interpolation / Schwerpunkberechnung / Annäherung mit hinein. Es ergibt sich ein dx/dt(n) und ein dy/dt(n). Das Wegelement ist das Integral über beide, vereinfacht die Summe über die Samples.
Angehängte Dateien:
-

ZeitPunktApproximation.png
1,6 KB -

GesamtApproximation.png
2,4 KB -

DT_01.png
2,4 KB -

DT_02.png
2,4 KB -

DT_03.png
2,4 KB -

DT_04.png
2,4 KB






{kind=link}
Signalverarbeiter schrieb: > Richtig, es ist faktisch eine Approximation, weil die Messwerte unsicher > sind. Die Interpolation bezieht sich auf die virtuellen (sozusagen > entrauschten) Punkte. Die Approximation erledigt damit das Entrauschen. Gut, wir nennen es nur anders, meinen aber dasselbe. Und das mit dem Entrauschen und deinem nachfolgenden Bemerkungen ist extrem wichtig: ich habe Oben z.B. 10 Punkte für eine Approximation gewählt, du aber willst nur die Punkte aus einem bestimmten Bereich. Nehmen wir mal dazu einen Zeitbereich um einen Zeitpunkt t (beliebig wählbar!), z.B. Range=[t-dt/2,t+dt/2] (dt>0,aber nicht zu klein) und bestimmen dazu alle zu approximierenden Punkte. Das ist ein wesentlich besserer Ansatz als mein 10-Punkte-Ansatz, denn er filtert über einen Zeitbereich und nicht über einem Indexbereich (ich hoffe mal, dir ist das klar), und du wirst so sicherlich ein besseres Ergebnis bekommen. Damit hast du dann folgenden Algorithmus (zuerst nur grob): 0. Annahme: alle Zeiten deiner Messungen sind in [0..1] (Vereinfachung für die Berechnungen, das ganze funktioniert mit entsprechenden Änderungen auch auf offenen Zeitbereichen) 1. wähle einen Zeitpunkt t, zu dem du einen Punkt berechneen willst. Dazu noch ein geeignetes dt für das Zeit-Intervall. 2. Bestimme alle Punkte pi und Zeitpunkte ti, so dass ti in [t-dt/2,t+dt/2] gilt 3. Berechne eine Polynom-Approximation über den Punkten pi des Zeit-Intervalls 4. Berechne aus dem berechneten Polynom einen Punkt p. Die Menge aller berechneten p ergibt dann deine gewünschte Kurve. Zur Approximation: da kann eine sog. Bestapproximation gewählt werden, typischerweise nach dem Gauss-Ansatz (hier mal eine quadratische Approximation): M sei eine Matrix[1..3,1..k], k: Anzahl Punkte des Intervalls M[1,*] = 1 M[2,*] = [ht1,..,htk] die Zeitpunkte des Intervalls M[3,*] = [ht1^2,..,htk^2] deren Quadrate MT = transpose(M) MI = invert(MT*M)*MT *: Matrix-Multiplikation vx = [p1.x,..,pk.x] x-Koordinate vy = [p1.y,..,pk.y] y-Koordinate mit: ht1 = (t1-t1)/(tk-t1) Zeitbereichsnormierung .. htk = (tk-t1)/(tk-t1) damit: (cx,cy: Polynome der Form c[1]*1 + c[2]*x + c[3]*x^2) cx = MI*vx *: Matrix-Vector-Produkt cy = MI*vy px = cx[1]+0.5*cx[1]+0.25*cx[2] wähle Punkt in ht=0.5 py = cy[1]+0.5*cy[1]+0.25*cy[2] p = [px,py] ist dann der zu berechnende Punkt. (grosses Problem, wenn die Anzahl Punkte im Bereich kleiner 2 ist, dann kann aber der Durchschnitt der Punkte Als Approximation gewählt werden) Ich habe hier das Approximationspolynom in ht=0.5 berechnet, weil er ja in der Mitte des Zeitintervalls liegt. In den Angehängten Skizzen wird es hoffentlich klar. Skizze1: Approximation zu einem Zeitpunkt Skizze2: Approximation zu allen (äquidist.) Zeitpunkten Skizze3: DT=0.1 Skizze4: DT=0.2 Skizze5: DT=0.3 Skizze6: DT=0.4 (hier sieht man gut, dass mit wachsendem dt die Approximationskurve "glatter" wird, aber auch die Form der Punkte aus dem Auge zu verlieren scheint) Viel Spass..
Wuhui! das lese ich mir am Wochenende durch. Danke!
Signalverarbeiter schrieb: > Wie geht das am einfachsten? In dem man schreibt was man will: Aus GPS Punktwolke den vermutlich zurückgelegten Track berechnen.
Kalman schrieb: > Ein Kalman-Filter als Schätzer? Funktioniert nur für äquidistante Messzeitpunkte und bei linearer verrauschter Bewegung. Hier trifft wohl beides nicht zu.
Signalverarbeiter schrieb: > mit gfs einem CIC-Aufwärts-Interpolator. Grundsätzlich ja, aber nicht bei verrauschten Daten. Hier läuft es auf einen Schätzer hinaus. Entscheidend ist, wie weit der in die Vergangenheit und Zukunft schauen soll / darf. Bei ausreichend Punkten ist das kein Problem. > Im 2D fehlt dazu aber ersteinmal der Bezug, da X und t nicht > equidistant sind. konstante Abstände und 2D sind zwei Paar Schuhe. Das Problem der ungleichmäßigen Punkte gibt es auch im Eindimensionalen. Die Lösung muss daran orientiert werden, wie schnell sich die Kurve ändern kann. Diese Krümmung wirkt direkt auf das Differential. Die Trägheit mit der die Kurve verläuft, z.B. bei einem massebelasteten System wäre eine Information für die zweite Ableitung. Mit diesen Randbedingungen kann man schon einmal 3 Gleichungen aufstellen, in den Zeitbereich überführen und so umformen und mit Punkten füttern, dass eine überbestimmte Gleichung entsteht, die man optimieren kann.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.