Servus zusammen, ich habe hier einen kleinen Servomotor (Torcster NR-58 Digital), den ich mit einem PIC ansteuere. Zum Servo habe ich leider keinerlei Datenblatt. Ich habe mal ein bißchen rumgespielt und festgestellt, daß er die Position auch hält, wenn ich die PWM wieder wegnehme. LIegt wohl daran, daß es ein digitaler Servo ist, oder!? Heißt das dann im Umkehrschluß dann auch, daß der Servo über die Versorgungsleitung (rot) auch ständig Strom zieht? Und weiß jemand wie hoch diese Ströme typischerweise sind? Danke euch schon mal :-)
Hallo Alex, Was das Servo bei fehlendem PWM-Signal tut, hängt vom Servo ab. Eigentlich ist das ja Betrieb außerhalb des Datenblatts. Und zur Stromversorgung: Wenn das Servo wirklich die Position aktiv hält, dann wird die Stromaufnahme von der Kraft abhängen, mit der das Servo die Position hält. Wirken keine Kräfte auf den Hebel, wird die Stromaufnahme vernachlässigbar klein sein. Bei der maximal zumutbarer Kraft wird die maximale Menge an Strom gezogen, sog. "stall current". Dazwischen verhält sich das ziemlich linear proportional. Upd.: die typischen ströme dafür kenne ich nicht, aber die werden wahrscheinlich um die 500 mAh max. liegen. Das sagt das Datenblatt von einem ähnlichen (etwas größer und analog) Servo, Tower Pro SG90. Als Anfangswert passt es ganz gut.
:
Bearbeitet durch User
Angehängte Dateien:
-

MOSFET_an_Servo.jpg
240 KB

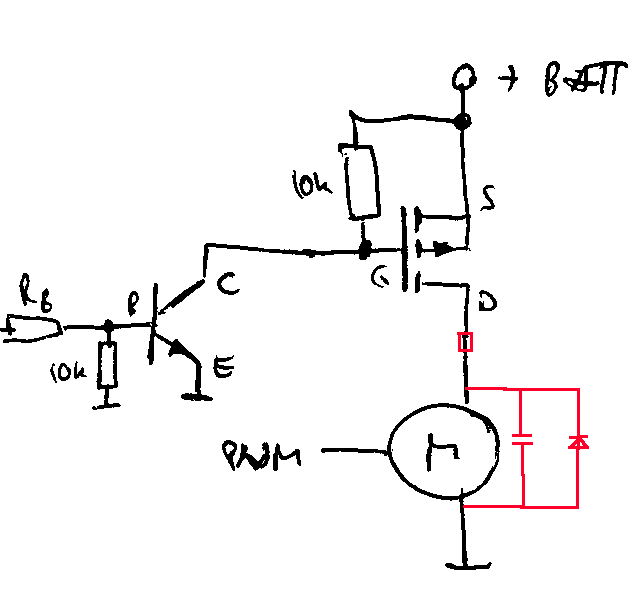
Danke Dir schon mal für Deine Antwort. Ich hab mal nachgemessen - mein Servo zieht im Ruhezustand ca. 2,5 mA. Dies hätte ich allerdings gern unterbunden da das ganze an einer Batterie hängt und die würde ich gerne schonen. Zudem geht der PIC, der das ganze ansteuert irgendwann in den SLEEP-Mode. In der Zeit brauche ich den Servo auch nicht. Da ich hier noch einen MOSFET (IRLZ-44N) rumliegen hatte dachte ich mir das ganze einfach über den PIC auszuschalten (siehe angehängt Schaltung). Allerdings zieht der Servo trotz abgeschalteten MOSFET immer noch gleich viel Strom. Habe ich hier einen Denk- oder Dimensionierungsfehler?
:
Bearbeitet durch User
Viktor B. schrieb: > Upd.: die typischen ströme ... werden wahrscheinlich um die 500 mAh max. liegen. Ganz schlechte Einheit, um damit Angaben über Ströme zu machen :-(
Alex H. schrieb: > Habe ich hier einen Denk- oder Dimensionierungsfehler? Ersteres. Du klaust Masse am Versorgungspin, lässt sie aber am PWM-Pin. Ergebnis: parasitierende Versorgung über den Portpin des Prozessors. Weh dir du hast ein PWM-Signal auf der Steuerleitung ohne das der FET an ist: Voller Strom aus dem Portpin und das war's mit dem Proz. Mal ganz ab davon das keiner weiß wie die Eingangsschaltung am Servo ist, also ob die das verträgt schon den Ruhestrom zu tragen. Viele haben da zur TTL-isierung eine Transistorstufe dran, die auf GND schaltet, da geht sowas eigentlich gar nicht??? Du musst Plus schalten. Aber: das wäre das erste Servo das die Position hält ohne Steuersignal das mit unterkommt. Meine gehen alle aus nach 1-2 Sekunden.
Die PWM-Leitung hatte ich abgeklemmt und hatte den Strom trotzdem... Klemme ich den 10k Widerstand dann gegen Masse oder gegen Drain, wenn ich den MOSFET zwischen Plus und Drain hänge? Dero muß die Position in dem Moment auch nicht halten. Da ist eine kleine Feder am Motor, die ihn hält.
Alex H. schrieb: > Die PWM-Leitung hatte ich abgeklemmt und hatte den Strom trotzdem... Wenn der Strom über die Versorgungsleitung zum Servo fließt, dann muss er auch irgendwo wieder zurückfließen. Wenn das über die PWM-Steuerleitung nicht möglich ist (weil du sie abgeklemmt hast) und wenn es über den GND-Anschluss nicht möglich ist (weil dort ein sperrender FET eingebaut wurde), dann kann kein Strom fließen. Wenn du trotzdem einen Strom misst, dann hast du entweder einen Fehler in deinem Aufbau oder einen Fehler in deiner Messung. Ein Fehler im Aufbau könnte z.B. sein, dass du den FET falsch angeschlossen hast (in deinem Schaltplan sieht er richtig aus). Oder dass du den FET zuvor irgendwie zerstört hast (überlastet?) und er jetzt nicht mehr sperren kann.
Alex H. schrieb: > Die PWM-Leitung hatte ich abgeklemmt Offen gelassen oder mit Pulldown? Alex H. schrieb: > Klemme ich den 10k Widerstand dann gegen Masse oder gegen Drain, wenn > ich den MOSFET zwischen Plus und Drain hänge? Den MOSFET betreibst du gar nicht am Plus, der ist ja gepolt und Gate muss "über" Source sein, damit er aufgeht. Du brauchst einen P-Channel FET und musst den dann je nach Spannung am Source evtl. mit einem Open Collector treiben, sonst raucht dein Controller trotzdem. Die Schaltung bleibt aber so, nur die Polung ist andersrum.
Ich werde das nachher gleich mal noch aufbauen und testen. Und die 10k? Klemme ich die direkt von Gate gegen Masse oder über die Source Gate Strecke, wenn ich das in die Versorgung des Motors hänge?
Der Pulldown soll den Transistor zuziehen. Der muss also genau so geschaltet werden wie in der Schaltung oben. Nur das Minus Plus ist. Und weil du das vermutlich nicht weißt: Das Gate muss dann 0V sein für "an", und die Source gehört an das gleiche Potential wie die Versorgung des Controllers. Nix da 3,3V Controller und 5V oder 6V Servo, und nix da 5V Controller und 6V Servo. Wenn du das willst, musst du einen Transistor als Open Collector mit dem µC schalten, der dann den FET schaltet.
Angehängte Dateien:
-

P-Kanal_MOSFET.gif
3,1 KB
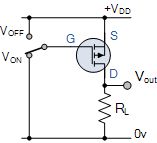
Ok, also wenn ich das jetzt richtig verstanden habe, dann muß das so aussehen, wie auf dem angehängten Bild? Und dann ggf. noch ein Pull-Up auf Versorgungsspannung. Die Versorgungsspannung ist bei beidem gleich. Und der hier wäre dann zum Beispiel ein passender? https://www.conrad.de/de/p/infineon-technologies-irf9z24npbf-mosfet-1-p-kanal-45-w-to-220ab-162549.html
Alex H. schrieb: > ich habe hier einen kleinen Servomotor (Torcster NR-58 Digital) Ähem. Das ist kein "Servomotor", sondern ein Modellbauservo. Der Unterschied ist in etwa so groß wie der zwischen "Natriumchlorid" und "Natriumdampflampe". > Ich habe mal ein bißchen rumgespielt und festgestellt, daß er die > Position auch hält, wenn ich die PWM wieder wegnehme. LIegt wohl daran, > daß es ein digitaler Servo ist, oder!? Nein. Das liegt daran, daß da ein fettes Getriebe mit Untersetzung um 1000:1 zwischen dem Motor und dem Abgang ist. Da reicht allein die Reibung, daß sich am Abgang von alleine nichts tut. Oder doch erst bei Kräften, wo das Servo mechanisch zerbröselt. > Heißt das dann im Umkehrschluß dann auch, daß der Servo über die > Versorgungsleitung (rot) auch ständig Strom zieht? Mit Umkehrschluß hat das nichts zu tun. Wenn das Servo die vorgegebene Position erreicht hat, wird es den Motor stoppen und dadurch dann viel weniger Strom brauchen als wenn der Motor drehen muß. Aber ganz auf 0 wird der Strom nicht fallen.
> Nein. Das liegt daran, daß da ein fettes Getriebe mit Untersetzung um > 1000:1 zwischen dem Motor und dem Abgang ist. Da reicht allein die > Reibung, daß sich am Abgang von alleine nichts tut. Oder doch erst bei > Kräften, wo das Servo mechanisch zerbröselt. Kann ich so nicht unterschreiben. Wenn er ohne Strom ist, dann kann ich ihn von Hand bewegen. Wenn Versorgungsspannung anliegt, aber keine PWM, dann läßt er sich nicht bewegen bzw. arbeitet dagegen.
Alex H. schrieb: > Kann ich so nicht unterschreiben. > Wenn er ohne Strom ist, dann kann ich ihn von Hand bewegen. > Wenn Versorgungsspannung anliegt, aber keine PWM, dann läßt er sich > nicht bewegen bzw. arbeitet dagegen. Ich habe bei digitalen Servos beide Erfahrungen gemacht. Futaba, Savöx, Hitec geben bei fehlendem Signal den Motor frei, kannst das Servo also dann gegen das Getriebe frei bewegen. Andere Digital Servos (Marke weiss ich grad nicht mehr) halten die Position auch bei fehlendem Signal. Versorungsspannung liegt natürlich immer an. Es gibt auch solche, die in die Nullposition zurückfahren. Sogar welche bei denen man das programmieren kann. Best practice ist wohl den Motor freigeben, damit beim Crash zumindest die Ruder/Lenkgetriebe/Rotoransteuerung nachgeben kann. Axel S. schrieb: > 1000:1 zwischen dem Motor und dem Abgang ist. Da reicht allein die > Reibung, daß sich am Abgang von alleine nichts tut. Oder doch erst bei > Kräften, wo das Servo mechanisch zerbröselt. Na na na. Da gibt es durchaus gescheite kugelgelagerte Servos mit Metallgetriebe und bürstenlosen Motoren.
:
Bearbeitet durch User
Axel S. schrieb: > Das liegt daran, daß da ein fettes Getriebe mit Untersetzung um > 1000:1 zwischen dem Motor und dem Abgang ist. Üblicherweise ist das deutlich weniger, so 50:1 plusminus. Alex H. schrieb: > Ok, also wenn ich das jetzt richtig verstanden habe, dann muß das so > aussehen, wie auf dem angehängten Bild? Ja, so etwa. Der IRF9Z24N ist aber nicht wirklich geeignet. Der geht bei 5V am Gate so gerade eben für ein Messgerät auf, der will 10V sehen. NDP6020P dürfte besser sein.
Alex H. schrieb: >> Nein. Das liegt daran, daß da ein fettes Getriebe mit Untersetzung um >> 1000:1 zwischen dem Motor und dem Abgang ist. Da reicht allein die >> Reibung, daß sich am Abgang von alleine nichts tut. Oder doch erst bei >> Kräften, wo das Servo mechanisch zerbröselt. > > Kann ich so nicht unterschreiben. > Wenn er ohne Strom ist, dann kann ich ihn von Hand bewegen. > Wenn Versorgungsspannung anliegt, aber keine PWM, dann läßt er sich > nicht bewegen bzw. arbeitet dagegen. OK. Ich hatte noch kein solches "digitales" Servo in den Fingern. Kann durchaus sein, daß sich ein solches den letzten Sollwert merkt und dann auch aktiv beibehält. Das wird man dann auch am Stromverbrauch sehen, ob der ansteigt wenn man eine Rückstellkraft aufs Servo gibt. Philipp G. schrieb: > Best practice ist wohl den Motor freigeben, damit > beim Crash zumindest die Ruder/Lenkgetriebe/Rotoransteuerung nachgeben > kann. Da kann man verschiedener Ansicht sein. Wenn das Modell den Empfangsbereich verläßt, ist es evtl. auch besser, die aktuelle eingestellten Servopositionen zu halten. Philipp G. schrieb: > Na na na. Da gibt es durchaus gescheite kugelgelagerte Servos mit > Metallgetriebe und bürstenlosen Motoren. Jens M. schrieb: > Üblicherweise ist das deutlich weniger, so 50:1 plusminus. OK. 1000:1 war vielleicht etwas übertrieben. Zur besseren Anschaulichkeit. Trotzdem würde ich erwarten, daß ein Servo ohne Signal den letzten Zustand einfach hält. Mit einem deutlichen Haltemoment. Zugegeben habe ich die Thematik seit Jahrzehnten aus den Augen gelassen. Zumindest an den Steuersignalen hat sich ja anscheinend seitdem nichts verändert. Aber die Impulsvermessung und Positionserfassung kann man mittlerweile sicher besser machen. Und weniger Untersetzung spart Gewicht und Energie (Reibungsverluste).
Axel S. schrieb: > Zugegeben habe ich die Thematik seit Jahrzehnten aus den Augen gelassen. > Zumindest an den Steuersignalen hat sich ja anscheinend seitdem nichts > verändert. Doch. Es gibt S-Bus, da hängst Du alle Servos einfach in Reihe. Man muss nicht mehr jedes Servo mit dem Empfänger verbinden. Alles digital und voll programmierbar. Das klassische Steuersignal mit PWM funktioniert natürlich immer noch.
Philipp G. schrieb: > in Reihe Parallel. SBus ist ein serielles Protokoll, das immer alle Kanäle raushaut. Die Servos bzw. SBUS-PWM-Adapter sind parallel dran und müssen (!) programmiert werden, damit sie wissen, welches der Datenworte für sie ist. Man kann damit auch mehrere Servos "parallelschalten", also logisch identisch reagieren lassen, oder eben auf jeden KAnal nur eins programmieren. Eigentlich nett, nur leider wenig verbreitet...
Angehängte Dateien:

> 5V Controller und 6V Servo. > Wenn du das willst, musst du einen Transistor als Open Collector mit dem > µC schalten, der dann den FET schaltet. Also wäre das so möglich, wie auf der Skizze, daß der Motor dann nur bei einer 1 am PIC versorgt ist?
Eine kleine Frage hätte ich noch. Auf der letzten Schaltung habe ich am Transistor über BE einen Pulldown Widerstand. Angesteuert wird das von einem PIC. Macht es einen Unterschied, ob der Pulldown über BE liegt oder direkt am Pin des PIC? Bastle ich mir mit dem Pulldown über BE nicht einen Spannungsteiler, wenn der Basiswiderstand relativ groß (ähnlich dem Pulldown) ist?
Ja, das ist ein Spannungsteiler. An dem belasteten Mittelabgriff liegt aber ja nur 0,7V ;)
Jens M. schrieb: > Ja, das ist ein Spannungsteiler. > An dem belasteten Mittelabgriff liegt aber ja nur 0,7V ;) Oh Mann, ja klar... Da hätte ich ja mal selber dran denken können :-D Danke für‘s Anschubsen :-) Dann spielt es prinzipiell ja keine große Rolle, wo sich der Pulldown befindet.
Na doch schon: beim Trennen der Verbindung Servo vom Mikrocontroller ist es schon nicht mehr egal. Dein "Pull down"-Widerstand ist kein Pull Down für den Mikrocontroller, sondern ein Pull down für den angesteuerten Transistor. Also gehört er unmittelbar an den Transistor, damit bei offenem Eingang die Basis immer festes Potential hat. Blackbird
Angehängte Dateien:
-

a.png
4,5 KB
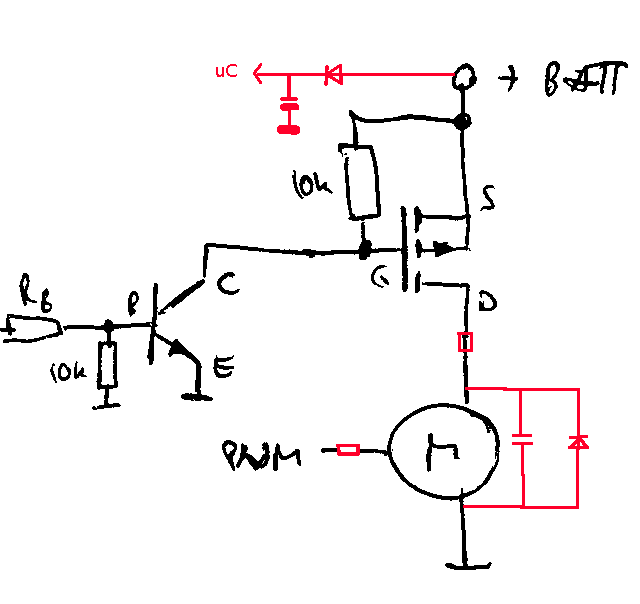
Vorsicht pöhse Fallen! Parallel (intern) zum Servo liegt möglicherweise ein fetter Elko (in der Zeichnung als C dargestellt); dann könnte der Einschaltstrom beim einschalten der Servoversorgung sehr gross werden. Soweit ich es verstanden habe hat das gesamte Mopped nur eine einzige Versorgung...in Folge: dann treten beim (softwaremässigem) einschalten der Servoversorgung einbrüche in der Versorgungsspannung des Controllers auf...lustige Seiteneffekte (zB RESET) inklusive. Eine zugegeben sehr primitive Abhilfe: R zur Strombegrenzung. Anderes Problem: der Servo steht beim abstellen unter mechanischer Last, also hoher Stromfluss, in Folge dann uU eine induktive Wirkung des Motors, negative Spikes drohen am Drain des Mosfets (und am PWM-Pin). Abhilfe: Schutzdiode mit (Puls-)Strombelastbarkeit mindestens so hoch wie der maximale Laststrom des Servos.
Bei voller Batterie scheint die Spannungsversorgung so weit zu halten, daß der Controller nicht in die Knie geht. Keine Ahnung, wie das aber dann ist, wenn die Batterie schwächer wird. Was für ein R würdest zur Strombegrenzung empfehlen? Geschalten wird nur im Ruhezustand und ohne Belastung des Motors. Da beträgt der Strom unter 4 mA. Das sollte also kein Problem sein.

{kind=link}
Alex H. schrieb: > Bei voller Batterie scheint die Spannungsversorgung so weit zu > halten, > daß der Controller nicht in die Knie geht. Keine Ahnung, wie das aber > dann ist, wenn die Batterie schwächer wird. Trick17: Wenn (falls) dein PIC mit 3,3V (ggf Taktfrequenz runtersetzen?) auch noch läuft: eine Kombination aus Diode und Al-Elko (zB 10uF) verhindert das "herunterreissen" der Versorgung am uController. > Was für ein R würdest zur Strombegrenzung empfehlen? Minimalwert mindestens passend zum maximalen Pulsstrom des Mosfets. Bei (angenommenen) 40A also Nennwert 0,1 Ohm. Sicherlich begrenzt auch der Rds(on) des Mosfets den Strom, aber darauf würde ich mich eher nicht verlassen..."gute" Exemplare erreichen heutzutage problemlos Werte im einstelligem Milliohmbereich. Kommt selbstverständlich auch auf den Innenwiderstand deiner Batterie an. Extrembeispiele: moderne Lipos für den Modellbau liefern gigantonomische Ströme, aber falls du "olle" Zink-Kohle Batterien verwenden solltest brauchst du dir da natürlich keine Gedanken zu machen :-) > Geschalten wird nur im Ruhezustand und ohne Belastung des Motors. Wenn (falls) du dich darauf 100%ig verlassen möchtest dann spare dir die Freilaufdiode. Aber bedenke bitte: falls nur ein einziges mal die zulässige Sperrspannung am Mosfet überschritten wird geht dieser kaputt. > Da beträgt der Strom unter 4 mA. Das sollte also kein Problem sein. Meine Einwände bitte als Brainstorm gegen den worstcase (unbekannte Servos ohne jedes Datenblatt) verstehen. Eine sehr ärgerliche Spassbremse ist wenn ein RC-Car mitten auf dem dünneisigem See liegen bleibt... Ich gehe noch einen Schritt weiter mit meiner Paranoia, wieder unter der Annahme dass der Servo sich "bösartig" verhalten _könnte_: am Pin zum uC könnten negative Peaks von mehr als 0,7V auftreten, also die Klammerdioden innerhalb des PICs belasten. Abhilfe: 100Ohm, siehe c.png.
Super, Danke Dir für die echt ausführliche Erklärung. Dann werde ich mich nochmal dransetzen und das ganze etwas pimpen :-)
> Trick17: Wenn (falls) dein PIC mit 3,3V (ggf Taktfrequenz runtersetzen?) > auch noch läuft: eine Kombination aus Diode und Al-Elko (zB 10uF) > verhindert das "herunterreissen" der Versorgung am uController. Habe ich mit einem Elko nicht einen ständigen Stromfluß? Wenn auch minimal. Um die Spannung zu halten wird dieser doch ständig "nachgeladen".
Alex H. schrieb: > einen ständigen Stromfluß? Gute Frage! Reichen 10uF überhaupt aus??? Überschlagsweise, mit Hausnummern: -Spannungseinbruch am uC: 0.3V seien erlaubt -Servo (dessen Elko oder dessen Motor) "klemmt" die Versorgung für 1/20s -Der PIC zieht 5 mA(???), Spannungseinbruch um 0.3V auf 3V sei erlaubt -1F=1A*1s/1V ;0,005A*0,05s/0,3V= 833uF Also eher mindestens 1000uF...(LOL. es hat wohl seinen Grund warum R-C-Modelle normalerweise getrennte Emfängerakkus haben) Hausnummer Leckstrom, diverse Datenblätter: 0,01 CV 0,01*0,001F*3,3V= 33uA Ohhwehhh! Wieviel Strom zieht denn dein PIC im sleepmode?
Der PIC soll laut Datenblatt bis 1,8 V noch arbeiten. Ich betreibe ihn mit drei AA-Batterien. Ist das der Einbruch überhaupt so hoch, wenn ich nichts mache? Im Sleep-Mode soll er ca. 5 uA verbrauchen. Also würde mir ein Elko ja die ganze Bilanz versauen...
Alex H. schrieb: > Der PIC soll laut Datenblatt bis 1,8 V noch arbeiten. Kling gut :-) > Ich betreibe ihn mit drei AA-Batterien. Ok, klingt nach Alkaline in einen Batteriekasten ("eingelegte")... Hausnummern : 2Ah, 10 Jahre aka 100kHr haltbarkeit, aka Selbstentladung im Bereich deutlichst unter 10uA. Kurzschlussstrom für "fette" Mosfets vernachlässigbar. Ein heutzutage hochgezüchteter SOT-23 steckt das möglicherweise ohne weiteren Vorwiderstand (Einschaltsrombegrenzung) locker weg. > Ist das der Einbruch überhaupt so hoch, wenn ich nichts mache? Kann ich nicht Ahnen! Hängt vom Servo (dessem uU eingebautem Kondensator) und deiner Verdrahtung ab. Auch von der Güte (Kontaktierung) deines Batteriefaches. > Im Sleep-Mode soll er ca. 5 uA verbrauchen. Also würde mir ein Elko ja > die ganze Bilanz versauen... Ja nein doch oh! https://www.youtube.com/watch?v=w4aLThuU008 Wenn ich in meinem Suff nicht schonwieder Microampere mit Nanoampere (Messtechnik) verdreht hätte (beim eigene Nachmessen wegen Bauchgefühl), dann hätte ich schon früher geantwortet :D 2 Cent schrieb: > Hausnummer Leckstrom, diverse Datenblätter: 0,01 CV gilt (je nach Dabla) nach 1 bis 5 Minuten. Der Strom wird allerdings (an Gleichspannung aka Batterieversorgung) mit der Zeit immer noch kleiner: https://de.wikipedia.org/wiki/Elektrolytkondensator#Dielektrische_Absorption_%28Nachladeeffekt%29 und ist damit nicht langzeitgültig. Gemessene Bauteil(e): seit Jahren ausser Betrieb. Lagerung nach auslöten "lose Schüttung" Gemessener Elkoleckstrom an ausgelöteter Schlachtware (also schon thermisch zweimal an kurzen Anschlüssen belastet): -nach 14 minuten bei 4,5V <20uA an 4,5V EDIT : 20nA Ein anderes Exemplar: nach 40 Minuten < 100nA an 9V Die gemessenen Kandidaten (220uf/10V): https://www.amelec.ch/tl_files/amelec/downloads/capxon/sm.pdf
Danke für die ausführliche Erklärung :-) Ich werd mich da nochmal damit auseinandersetzen.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.