Hallo,
Ich habe einen CANopen Slave, welchen ich mit einem Arduino ansteuern
möchte. Der CAN-Bus funktioniert soweit tiptop und ich kann Daten
verschicken und empfangen, jedoch weiss ich nicht, wie ich nun eine SDO
schicken kann, um damit das OD zu manipulieren.
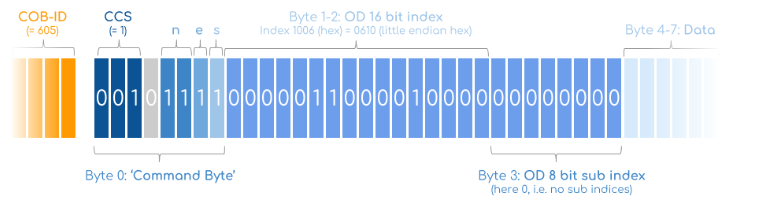
Der Aufbau des CAN-Frames ist im Anhang zu finden. Der Slave hat Node
Adresse 10. Im OD möchte ich auf den Index 0x2301, SubIndex 0x00
zugreifen, ein int64_t Wert.
Wie genau baue ich da die CAN Message auf? Die can_id müsste ja zuerst
einmal den function code beinhalten (0b1100 für SDO transmit) sowie die
node id (0x0A). Wo genau kommt nun aber der Index und der SubIndex hin?
Hier noch der Auszug aus dem Header der Library für CAN:
1 | #ifndef CAN_H_
|
2 | #define CAN_H_
|
3 |
|
4 | #include <stdint.h>
|
5 |
|
6 |
|
7 | typedef unsigned char __u8;
|
8 | typedef unsigned short __u16;
|
9 | typedef unsigned long __u32;
|
10 |
|
11 |
|
12 | /* special address description flags for the CAN_ID */
|
13 | #define CAN_EFF_FLAG 0x80000000UL /* EFF/SFF is set in the MSB */
|
14 | #define CAN_RTR_FLAG 0x40000000UL /* remote transmission request */
|
15 | #define CAN_ERR_FLAG 0x20000000UL /* error message frame */
|
16 |
|
17 | /* valid bits in CAN ID for frame formats */
|
18 | #define CAN_SFF_MASK 0x000007FFUL /* standard frame format (SFF) */
|
19 | #define CAN_EFF_MASK 0x1FFFFFFFUL /* extended frame format (EFF) */
|
20 | #define CAN_ERR_MASK 0x1FFFFFFFUL /* omit EFF, RTR, ERR flags */
|
21 |
|
22 | /*
|
23 | * Controller Area Network Identifier structure
|
24 | *
|
25 | * bit 0-28 : CAN identifier (11/29 bit)
|
26 | * bit 29 : error message frame flag (0 = data frame, 1 = error message)
|
27 | * bit 30 : remote transmission request flag (1 = rtr frame)
|
28 | * bit 31 : frame format flag (0 = standard 11 bit, 1 = extended 29 bit)
|
29 | */
|
30 | typedef __u32 canid_t;
|
31 |
|
32 | #define CAN_SFF_ID_BITS 11
|
33 | #define CAN_EFF_ID_BITS 29
|
34 |
|
35 | /* CAN payload length and DLC definitions according to ISO 11898-1 */
|
36 | #define CAN_MAX_DLC 8
|
37 | #define CAN_MAX_DLEN 8
|
38 |
|
39 | struct can_frame {
|
40 | canid_t can_id; /* 32 bit CAN_ID + EFF/RTR/ERR flags */
|
41 | __u8 can_dlc; /* frame payload length in byte (0 .. CAN_MAX_DLEN) */
|
42 | __u8 data[CAN_MAX_DLEN] __attribute__((aligned(8)));
|
43 | };
|
44 |
|
45 | #endif /* CAN_H_ */
|
Gruss Bert