Hallo zusammen, ich bin kein Techniker, bitte daher um Nachsicht und außerdem darum, dass bei eventuellen Antworten alles recht "deppenfreundlich" erklärt wird. ;-) Hier tummeln sich so viele Experten, da muss ich doch ein bisschen schlauer werden können. Ein Freund und ich stecken in einem Projekt, bei dem wir eine Apparatur herstellen möchten, die die Position eines darüber fliegenden Objekts erfasst und bestimmt. Im Detail soll es so aussehen, dass die Apparatur auf dem Boden liegt, ein Ball darüber hinweg fliegt und auf einem Ausgabegerät angezeigt werden soll, wo (x- und y-Achse, also sowohl Position der Apparatur als auch in welcher Höhe) dieser Ball die Apparatur überflogen hat. Wir sind nun zu dem Entschluss gekommen, dass sich dies mit ToF-Sensoren bewerkstelligen lassen müsste. Die Breite, über die eine Messung stattfinden soll, beträgt ca. 60cm, die Höhe bis zu 180cm. Sofern die Ich stelle mir nun vor, dass die "Ausstrahlung" des Sensors nicht linienförmig (also keine Fläche abdeckt), sondern eher in einer Kegelform (und somit in einem Raum abdeckt) erfolgt, ist das korrekt? Wenn dem so ist, müssten wir das Problem der "dritten Dimension", also der Tiefe, irgendwie beheben. Wir möchten nur die Position des Objekts in Breite und die Höhe als Ausgabe erhalten. Die Fragen lauten also: - ist es möglich mit einem ToF-Sensor (oder auch einer ToF-Kamera) die genaue (+/- 2cm) Position des Objekts auf der x- und y-Achse zu bestimmen? - falls zutreffend: wie kann man die "dritte Dimension" (Tiefe) unberücksichtigt lassen bzw. auf einen Punkt reduzieren? - wieviele ToF-Sensoren würde man für eine Breite von 60cm benötigen? - hat vielleicht sogar jemand eine Produktempfehlung? Vielen, vielen Dank schonmal für qualifizierte und ernstgemeinte Antworten! Beste Grüße, Tim
Tim Meyer schrieb: > Die Breite, über die eine Messung stattfinden soll, beträgt ca. 60cm, > die Höhe bis zu 180cm. Und die Bälle? Medizin- oder Golfbälle? Maximale Geschwindigkeit?
Hi Frank, danke für's Nachhaken, hier die Antworten: - die Bälle haben einen Durchmesser von ca. 7,5cm - die Geschwindigkeit der Bälle beträgt bis zu 160km/h
Ah, hier gehts also um Baseball. Offenbar möchtest Du die Position des Balles in der Strike Zone erfassen. Turnt da nicht auch noch der Schläger des Batters rum? Oder soll die Position des Balles vor Erreichen der Strike Zone gemessen werden?
:
Bearbeitet durch Moderator
Frank M. schrieb: > Turnt da nicht auch noch der Schläger des Batters rum? Oder soll die > Position des Balles vor Erreichen der Strike Zone gemessen werden? Egal wie scheint mir ToF nicht besonders geeignet, da zu langsam. Vielleicht ein (horizontales und vertikales) Laser-Lichtgatter? Die setzen offensichtlich eine Kamera ein. Scheint wohl schnell genug zu sein (hätte ich nicht vermutet). https://rapsodo.com/baseball/pitching/
:
Bearbeitet durch User
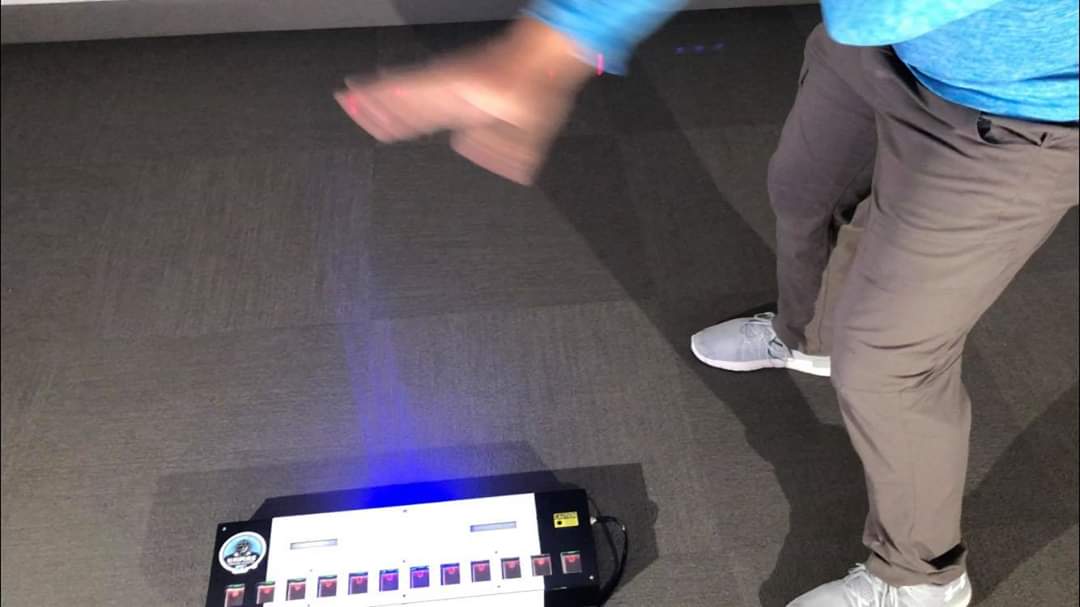
Hi, bei Euch kann man wohl nicht viel geheim halten, was? ;-) Sportart ist richtig. Laserraster scheidet für uns aus, war aber unsere erste Idee. Es ist aber nicht praktikabel, hierfür einen Rahmen aufzubauen (was meines Erachtens nach notwendig wäre, wenn man es mit einem Laserraster umsetzt). Der Schlagmann (oder Schläger) ist kein Problem, es soll sich hier lediglich um ein Trainingsdevice handeln, es wird nicht nach dem Ball geschlagen. Ganz aktuell gibt es wohl einen amerikanischen Prototypen, der genau das umsetzt, was wir wollen. Leider nur ein Facebook-Link zu dem Video: https://www.facebook.com/milbumpireacademy/videos/2528886800716185/?q=MilB%20Umpire%20academy Letzten Endes soll es im Endeffekt genau so funktionieren. Die blinkenden Lichter sind nicht wirklich notwendig, es reicht aus, wenn die Ausgabe über eine Konsole erfolgt. Der Ball soll in der Strikezone erfasst werden. @Hugohurtig: warum denkst Du, dass ToF nicht möglicch wäre? Ich war eigentlich der Meinung, dass die Erfassungszeiträume (oder wie man es nennt) bei ToF kurz genug sind, um den Ball erfassen zu können. 160km/h sind sehr hoch angesetzt, 150km/h sollten auch ausreichen.
Tim Meyer schrieb: > https://www.facebook.com/milbumpireacademy/videos/2528886800716185/?q=MilB%20Umpire%20academy Kann leider nicht jeder sehen.
Tim Meyer schrieb: > @Hugohurtig: warum denkst Du, dass ToF nicht möglicch wäre? Ich war > eigentlich der Meinung, dass die Erfassungszeiträume (oder wie man es > nennt) bei ToF kurz genug sind, um den Ball erfassen zu können. 160km/h > sind sehr hoch angesetzt, 150km/h sollten auch ausreichen. Hast Du Dir mal gedanklich eine Tim Meyer schrieb: > Kegelform (und somit in einem Raum abdeckt) - eher einen flachen Abstrahlwinkel - gedacht, welche an der Basis 60 cm bei einer Höhe von 180 cm ausmacht - mit einer Auflösung von Tim Meyer schrieb: > (+/- 2cm) bis in 180 cm Höhe (wobei die Basis vermutlich nicht 1- 2 m unter der Erde sein wird. Schau Dir mal gängige ToF-Sensoren und deren "Reaktionsverhalten" an. Wie viele Messungen (pro Strahlrichtung) können die denn pro Sekunde präzise machen? Und wie viele Strahlen musst Du denn (da brauchst Du auch noch eine Spiegellösung oder eine mechanische Lösung) pro Sekunde auswerten bei 160 km/h (das sind 44,44 m/s) , 7,5 cm Balldurchmesser und den o.g. Ausgangsbedingungen? Vielleicht habe ich mich verrechnet - aber bei +/- 2 cm hast Du an jeder Seite des Balls ca. 1 cm, das bedeutet für den Ball bei 160 km/h hast Du ca. 5 - 6 cm um die Position zu ermitteln mal eine unbegrenzte Auflösung vorausgesetzt). Umgerechnet sind das 1,3 ms - zeige mir mal einen ToF-Sensor, der das (mit dem noch zu rechnenden Fächer) erkennen kann. "Wenn Du entdeckst, dass Du ein totes Pferd reitest, steig ab."
:
Bearbeitet durch User
Angehängte Dateien:
-

FB_IMG_1574966752187.jpg
72 KB

Verstehe, ein einzelner Sensor kriegt es nicht hin. Wie sieht es aus bei mehreren Sensoren, die nur "punktuell abtasten"? Das dürfte dann prinzipiell auch nicht funktionieren, weil auch da der Ball bei hohen Geschwindigkeiten nicht erfasst wird, richtig? Wie sähe es aus, wenn man zwei Sensoren hintereinander platziert und versetzt schaltet? Dann hätte ich doch die durch die Sensoren abgedeckte Zeit verdoppelt, richtig? Ginge sowas? Ja, den Link kann man leider nur nach Anmeldung bei Facebook sehen, glaube ich. Er ist aktuell nur dort verfügbar. Ich hänge mal drei Bilder an, auf denen der Prototyp zu sehen ist. Auf den Bildern mit dem blauen Licht wird die Höhe eingestellt, die im Programm die untere und die obere Kante festlegen. Wenn es sich hierbei nicht um Tod Sensoren handelt, worum dann? Beste Grüße, Tim

Viele Mobiltelefone können inzwischen Videos mit 120 fps oder mehr aufnehmen, bei passabler Auflösung (720p und mehr). Wie wäre es damit? Einige Hersteller bieten auch 960 fps an, die direkt im Sensor gepuffert werden, das ist dann die tatsächliche Bildwiederholrate. Da muss man aber passend triggern und das Video rauscht recht stark. Andere Hersteller nutzen das eher als Marketinggag und interpolieren - also aufpassen.
Angehängte Dateien:
-

FB_IMG_1574968568088.jpg
70 KB
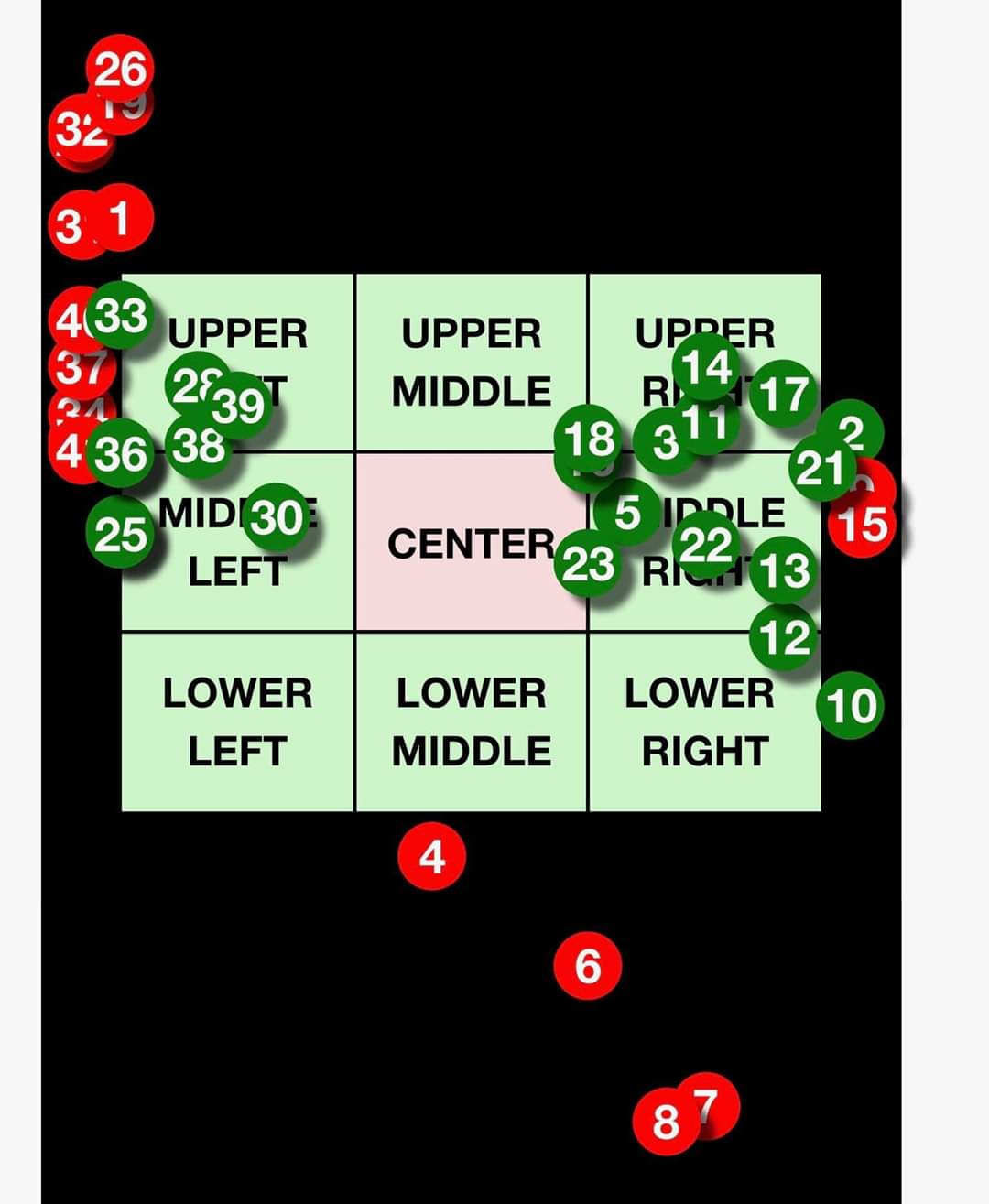
Vielleicht zur Kalrstellung: es geht nicht um Video, sondern "nur" um die Darstellung der Punkte, wo der Ball die Fläche durchquert hat. Die Ausgabe sieht dann etwa so aus wie in diesem Bild.
Ein Video gibt dir zwei Raumdimensionen und eine Zeitdimension. Mit einer stationären Kamera und einem beweglichen Objekt (Ball) kannst du anhand der Parallaxe die dritte Dimension ermitteln. Das wäre dann "nur" Software, aber dafür auf einem (hinreichend fähigen) Telefon lauffähig. :-)
Aber inwiefern würde bei einem Video eine Messung vorgenommen, über die die Werte der x- und y-Achse bestimmt werden können? Ich muss ja danach sagen können, dass der Ball (auf +/- 2cm genau) an dem Punkt das Gerät überquert hat. Welche Hardware wäre da erforderlich? Danke und Gruß, Tim
Tim Meyer schrieb: > Aber inwiefern würde bei einem Video eine Messung vorgenommen, > über die die Werte der x- und y-Achse bestimmt werden können? Mal angenommen, das Telefon liegt auf dem Boden und filmt nach "oben". Du kennst die reale Größe des Balls, also kannst du aus der Größe des Balls in Pixeln den Abstand zum Sensor ermitteln. Das entspricht deiner X-Achse. Wenn das Telefon genau zentriert auf dem Boden liegt, dann ergibt sich deine Y-Achse aus der Ballposition (im Video) von der Mitte. Du musst halt alles noch durch ein bisschen Trigonometrie schieben, aber du hast zwei gesuchte Größen (X,Y auf der Tafel) und du hast zwei gegebene Größen (x,y auf dem Bild). Das eine ist eine Projektion des anderen, sollte also gehen - die Projektionsparameter hängen vom realen Aufbau ab.
1 | \ +---+ / +--------+ |
2 | \ |* | / | * | |
3 | \ +---+ / | * | |
4 | \ / | * | |
5 | \ / | * | |
6 | \ / +--------+ |
7 | * |
8 | Telefon liegt unten; Ball fliegt etwas |
9 | Ball trifft von links "links" durchs Bild |
Die Auflösung in Y-Richtung wird schlechter, je näher der Ball am Sensor ist, aber das könnte trotzdem reichen. Hängt halt davon ab, wie genau das alles sein muss; müsstest du mal ausmessen. Ich kann kein Baseball. Wenn du den Abstand zum Hallendach (Hallenhöhe) kennst, dann kannst du die Bewegung des Balls damit abgleichen, was vermutlich genauer ist, als wenn du das über die absoluten Pixel machst. Im Freien wird das schwierig, aber du kannst ja eine Maßstabstafel auf eine Seite stellen und das alles um 90° drehen. Außerdem kennst du die Zeit zwischen den aufgenommenen Bildern. Aus der Bewegung des Balls (in Pixeln) und dem Abstand kannst du die reale Geschwindigkeit errechnen und daraus die 3D-Flugbahn des Balls über die Zeit. Du suchst eine zusätzliche Dimension (z = Abstand zum Ziel) und du bekommst eine zusätzliche Dimension (t = Timestamp vom Bild); sollte also auch machbar sein. Ich würde an deiner Stelle einfach mal ein paar Testvideos schießen, zu denen ich die realen Werte kenne und schauen, ob ich eine hinreichend genaue Projektionsmatrix zusammengebastelt bekomme. Aktuelle Smartphones sind in jedem Fall schnell genug, um die Ballposition in Echtzeit aus dem Bild zu ermitteln (RenderScript, GPU und so Zeugs) und wenn du die Matrix hast, fallen die Koordinaten fast kostenlos dabei raus.
Hi Svenska, vielen Dank für Deine Mühe und die Ausführungen. Es macht für mich zwar alles Sinn was Du schreibst, scheint für mich aber keine elegante Lösung zu sein. Hinzu kommt dass ich denke, dass wir dann mit Näherungswerten rechnen, die nicht die Genauigkeit erreichen, die wir benötigen. Auch ist der Einsatz lediglich in einer Halle problematisch, das müsste schon überall passieren können. Hat niemand eine Ahnung, mit welchen Sensoren so etwas wie in dem Video/auf den Bildern bewerkstelligt werden kann? Es geht ja offenbar, aber wie? Gruß, Tim
Ich hatte mal TOF-Sensoren, also einzelne Chips mit einem Sender/Empfänger. VL53 von STM. Die haben eine Messzeit von 20 Millisekunden, in denen das Objekt still stehen muss. Der Messbereich war bis 1,5 Meter, größer war unser Raum nicht. Wenn man die im Array betrieben hat, dann störten sie sich auch gegenseitig. Meiner Meinung nach sind die nicht geeignet um irgendwelche fliegenden Bälle zu detektieren. Dann lieber Stereo Messkameras oder ähnliches.
So etwas gibt es z.B.: https://www.forbes.com/sites/scottkramer/2018/10/24/this-computerized-baseball-measures-way-more-than-pitching-velocity/#71875b544777 Keine Ahnung, was das kostet. Aber alle Profi-Lösungen sind recht teuer - ist ja auch kein Wunder, bei den Anforderungen :-)
Hugo H. schrieb: > Die setzen offensichtlich eine Kamera ein. Scheint wohl schnell genug zu > sein (hätte ich nicht vermutet). Na dann schau mal hier ;) https://www.kurzzeit.com/de/messtechnik/videos
Moin, Wenn die Tiefe (du meinst Entfernung zum Sensor?!) egal ist macht ein ToF wenig sinn. Nimm eine normale 2D Kamera - dann hast du die beiden anderen Richtungen und Präzision und Geschwindigkeit kannst du dir fast frei aussuchen. schönen Gruß, Alex
ich bins schrieb: > Hugo H. schrieb: >> Die setzen offensichtlich eine Kamera ein. Scheint wohl schnell genug zu >> sein (hätte ich nicht vermutet). > > Na dann schau mal hier ;) > > https://www.kurzzeit.com/de/messtechnik/videos Bzw. direkt auf Youtube nach "werner mehl kurzzeit" suchen.
Nach ein wenig googlen denke ich, dass es sich (bei dem Prototypen) um ein Kamera-Array handelt. Eine interessante Idee - vielleicht was neues zum Spielen :-)
Hi zusammen, @Alex: mit Tiefe meinte ich nicht die Entfernung zum Sensor, denn die ist eine der benötigten Werte. Ich meinte vielmehr die z-Achse (Höhe und Breite brauchen wir Tiefe ist egal), wenn das Sinn ergibt. Ich kenne die Hightech-Lösungen, diese sind aber nicht realistisch (viel zu teuer, liefern auch deutlich mehr Daten als benötigt). @Hugo: was muss ich mir unter einem Kamera-Array vorstellen und wäre sowas noch preislich realistisch? Gruß, Tim
Noch eine Frage: Ich gehe also recht in der Annahme, dass bei einem ToF-Sensor die Aussendung und das Empfangen des Laserstrahls nicht durchgehend sondern in "Schüben" (wie eine gestrichelte Linie) erfolgt? Gruß, Tim
Ok, habe mir wohl die Frage selbst beantwortet: die Hz-Zahl zeigt, wieviele Messungen/Sekunde vorgenommen werden. 1000Hz entspricht somit 1000 Messungen/Sekunde, korrekt? Wenn dem so ist: @Hugo: dann reicht doch ein Sensor mit 1000Hz aus, um Geschwindigkeiten bis 160km/h abzudecken, oder? (ich rechne mit einem Balldurchmesser von 7,5cm). Gruß, Tim
Tim Meyer schrieb: > @Hugo: dann reicht doch ein Sensor mit 1000Hz aus, um Geschwindigkeiten > bis 160km/h abzudecken, oder? (ich rechne mit einem Balldurchmesser von > 7,5cm). Nein. 1. Finde mal einen solchen Sensor 2. Bedenke Deinen "Fächer" Nochmal: Vergiss es. Tim Meyer schrieb: > @Hugo: was muss ich mir unter einem Kamera-Array vorstellen und wäre > sowas noch preislich realistisch? Na ja, 2 bis x Kameras in einer Linie in dem am Boden liegenden, flachen Kasten. Die sollten schnell genug und im Idealfall synchron sein. Fluppt der Ball durch, kann durch "Triangulation" die Position des Balls beim "Durchflug" bestimmt werden.
Hugo H. schrieb: > 1. Finde mal einen solchen Sensor > 2. Bedenke Deinen "Fächer" Sorry, bin immer noch nicht ab von der ToF-Idee. ;-) zu 1.: Gibt es, bspw. den hier: https://www.amazon.de/MakerHawk-Sensor-Modul-Laser-Ranging-Single-Point-Entfernungsaufl%C3%B6sung-Infrared-Distance-Sensor-Module-Plus/dp/B07PZC8MPS/ref=sr_1_2?__mk_de_DE=%C3%85M%C3%85%C5%BD%C3%95%C3%91&keywords=lidar%2B1000hz&qid=1575014301&sr=8-2&th=1 2.: Mit "Fächer" meinst Du quasi den "Kegel" über dem Sensor, sodass sich dann zwei Messbereiche von benachbarten Sensoren überlagern, oder? Kann man den Strahlungswinkel nicht einstellen und den Messbereich jedes einzelnen Sensors nicht über die Software einrichten? Die Idee mit den Kameras und Trigonometrie-Berechnung finde ich auch nicht uninteressant... In die Richtung haben wir allerdings noch gar nicht überlegt und müssten uns erstmal von 0 an schlau machen.
Moin, die handelsüblichen ToF-Sachen kannst du erst mal knicken, die sind für sowas nicht schnell genug. Und die, die es sind, wirst du vermutlich nicht kaufen wollen, das geht so bei 2k€ los. Egal wie, Kalibration musst du sowieso machen, da macht der von svenska beschriebene Ansatz durchaus Sinn, auch wenn er nicht fürchterlich "elegant" scheint. Es gibt im Fussball ähnliche Vision-Lösungen (Tor-Kamera..) Für erhöhte Genauigkeit gibt es Ansätze mit Laserpatterns, die funktionieren aber nur bedingt in der Draussenwelt bzw. benötigen spezielle Sensoren. Wenn du von der Idee nicht abzubringen bist: Hol dir ein Spielzeug a la Kinect oder Softkinetic, und probier mal rum. Sobald die Sonne scheint, wird's lustig.
Tim Meyer schrieb: > Es macht für mich zwar alles Sinn was Du schreibst, > scheint für mich aber keine elegante Lösung zu sein. Sie kommt mit minimalen Hardwareaufwand (und daher geringen Kosten) daher, benötigt aber dafür ein bisschen Einmessung. Wenn das für ein Hobby ist, dann würde ich das einfach mal durchimplementieren und schauen, wie genau das wird. > Hinzu kommt dass ich denke, dass wir dann mit Näherungswerten > rechnen, die nicht die Genauigkeit erreichen, die wir benötigen. Da ich die Größenordnungen und Genauigkeitesanforderungen nicht kenne, kann ich dazu nichts sagen. Mit höherer Kameraauflösung steigt die Genauigkeit. Vielleicht reichen auch 60 Hz, das können aktuelle Smartphones auch in 4k. > Auch ist der Einsatz lediglich in einer Halle problematisch, > das müsste schon überall passieren können. Das muss nicht in einer Halle sein. "Handy auf den Boden legen" war nur die einfache Variante fürs Erklären. Du kannst auch ein Stativ bauen, in das du das Handy reinlegst und dann von der Seite filmst statt von unten. Wenn du die Parallaxe ausnutzen willst, dann brauchst du halt gegenüber noch ein Holzgerüst mit Muster (ähnlich, wie das bei Slow-Motion-Video gemacht wird, wo die Kamera ein Lineal oder so filmt). Tim Meyer schrieb: > Sorry, bin immer noch nicht ab von der ToF-Idee. ;-) Viel Erfolg auch von mir. :-)



Hi, aber nochmal die Frage: 1000Hz reichen doch aus, oder? Die kann ich doch sogar für relativ kleines Geld kaufen. Warum sind die nicht geeignet? Ich habe das Video von oben, was wohl leider in einer geschlossenen Gruppe gepostet ist, nochmals woanders gefunden. Ist zwar immer noch Facebook, ein Login sollte aber nicht erforderlich sein: https://www.facebook.com/milbumpireacademy/videos/429445491018601/ Aus dem Video habe ich nochmal ein paar Screenshots erstellt. Ich bin mir sehr sicher, dass hier ein Lasersystem zum Einsatz kommt, denn: - auf dem Gehäuse ist ein gelber Laser-Warnsticker aufgeklebt - die selbst nennen das Ding "Laser Plate" :-) (kann sich natürlich auch einfach besser anhören als "Camera Plate") Vielleicht geben die Bilder ja noch ein bisschen mehr Aufschluss für jemanden, der sich auskennt, was sich in dem Gehäuse verbirgt? Es kann natürlich sein, dass die mit deutlich niedrigeren Geschwindigkeiten arbeiten und somit auch keine "hochauflösenden" ToF-Systeme zum Einsatz kommen, das kann ich nicht beurteilen. Es wäre jedoch ideal, wenn auch reale erreichbare Geschwindigkeiten (=bis zu 160 km/h) abgedeckt werden könnten.
schmeiss doch die TOF Idee endlich übern Haufen. das ist ein totes Pferd. am einfachsten dürften Stereo Kameras sein. Zwei Kameras die Links und Rechts des Messfeldes am Boden stehen und schräg nach oben schauen. aus den beiden Bildern kannst du die Position auf den cm genau bestimmen. wenn du unbedingt willst auch aus zwei aufeinanderfolgenden Bildersets Spin und Geschwindigkeit. Wenn du die Kameras über ein Kabel verbindest, hast du auch schon die richtige Ausrichtung der Kameras über dessen Länge sichergestellt. du könntest zusätzlich mit einem Linienlaser und einer Photodiode einen Trigger aufbauen, dann musst du auch die Auswertung nicht in Echtzeit erledigen, sondern nur relevante Einzelbilder verwerten. Das spart enorm Rechenleistung. Das sollte zumindest für einen Testaufbau mit wenigen 100€ zu schaffen sein. sg
@Svenska: Was ich an der Kamera-Idee noch nicht verstehe: wenn ich Geschwindigkeiten von bis zu 160 km/h ansetze, wie soll da eine Kamera mit 60Hz zuverlässig Daten liefern können? Die Idee von zoggl mit dem Trigger verstehe ich (Linienlaser fällt aber raus, glaube ich, der erfasst doch nur punktuell, oder?), frage mich aber, wie der Trigger dafür sorgt, dass die Kameras in den angezeigten Bildern auch wirklich den Ball erfassen sollen (bei 60Hz)? Gruß, Tim
Tim Meyer schrieb: > Was ich an der Kamera-Idee noch nicht verstehe: wenn ich > Geschwindigkeiten von bis zu 160 km/h ansetze, wie soll da eine Kamera > mit 60Hz zuverlässig Daten liefern können? Der Ball legt bei 160 km/h 44,4 Meter pro Sekunde zurück. Bei 240 fps (frames per second) sind das 18 cm, bei 60 fps sind das beachtliche 70 cm, welche der Ball von Bild zu Bild zurücklegt. Die Idee mit dem Trigger ist die, dass der Trigger die Kamera genau dann das eine Bild schießen lässt, wenn der Ball ins Bild kommt. Dann braucht man kein Video, sondern nur noch ein Einzelbild. Ich kenne jetzt nicht die Verzögerungszeiten von modernen Kameras, aber ich schätze, dass der Trigger schon einige Zeit vorher sein Signal an die Kamera senden muss. Wie der Trigger den Ball erfassen soll: Keine Ahnung. Eine Idee wäre vielleicht, unten einen Laser mit einer Linien-Linse anzubringen. > Linienlaser fällt aber raus, glaube ich, der erfasst doch nur punktuell, > oder? Dieser erzeugt keinen Punkt, sondern über die komplett benötigte Breite eine Linie nach oben, also einen 2D-Teppich - ohne irgendwelche Spiegelmechanik. Sobald der Ball diesen passiert, wird unten auf dem Ball diese Linie sichtbar. Ob man die Reflektion am Ball erfassen und als Trigger verwenden kann, weiß ich nicht. Mit entsprechender Optik sollte das aber möglich sein. Aber zurück zu der Idee mit den 240 fps: Mit 2 Kameras am Boden, welche im 45°-Winkel nach oben schauen, könnte man den Ball triangulieren.
:
Bearbeitet durch Moderator
Jep, verstehe. Also reichen die 60fps nicht aus, dann muss man schon deutlich höhere Zahlen haben. Ich hatte mich mit dem Laser als Trigger falsch ausgedrückt, Du hast natürlich vollkommen Recht mit der Linie. Aber dennoch bleibt das Problem dasselbe, denn der Ball hat unterschiedliche Flugbahnen und -kurven und kann somit gar nicht jedes Mal dieselbe Linie durchkreuzen. Dann wäre nur ein Lasernetz denkbar. Dann könnte man aber direkt die ganze Messung damit machen (klar, dann brauche ich auch noch Empfänger für den Laser auf der anderen Seite). Gäbe es noch andere Möglichkeiten für den Trigger? Eine Art schnell auslösenden Bewegunssensor?
Tim Meyer schrieb: > Aber dennoch bleibt das Problem dasselbe, denn der Ball hat > unterschiedliche Flugbahnen und -kurven und kann somit gar nicht jedes > Mal dieselbe Linie durchkreuzen. Doch. Ein Punktlaser erzeugt eine Linie. Ein Linienlaser jedoch erzeugt einen 2D-Teppich, spannt also eine ganze Ebene auf. Diese muss der Ball senkrecht dazu passieren.
:
Bearbeitet durch Moderator
Ah, ok, jetzt habe ich es kapiert. Danke Dir/Euch! Wir werden jetzt mal ein bisschen frickeln.
Diese Laser Box sieht ein bisschen nach Barcode Scannern aus. Wäre das vielleicht eine Anfrage an Honeywell & Co wert? Die machen ja grundsätzlich auch nichts anderes, als möglichst schnell und präzise die Unterbrechung einer Linie zu erkennen.
Frank M. schrieb: > Ich kenne jetzt nicht die Verzögerungszeiten von > modernen Kameras, aber ich schätze, dass der Trigger > schon einige Zeit vorher sein Signal an die Kamera senden muss. Moderne Kameras in Smartphones können "Zero Shutter Lag", d.h. man kann ein Stück weit in die Vergangenheit triggern, wenn man die App passend auslegt. Frank M. schrieb: > Mit 2 Kameras am Boden, welche im 45°-Winkel nach oben schauen, > könnte man den Ball triangulieren. Die muss man aber dann sehr genau synchronisieren, dann geht das. Und dann hat man auch Shutter Lag, aber der ist bei besseren Kameras (Spiegelreflex oder so) konstant.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.