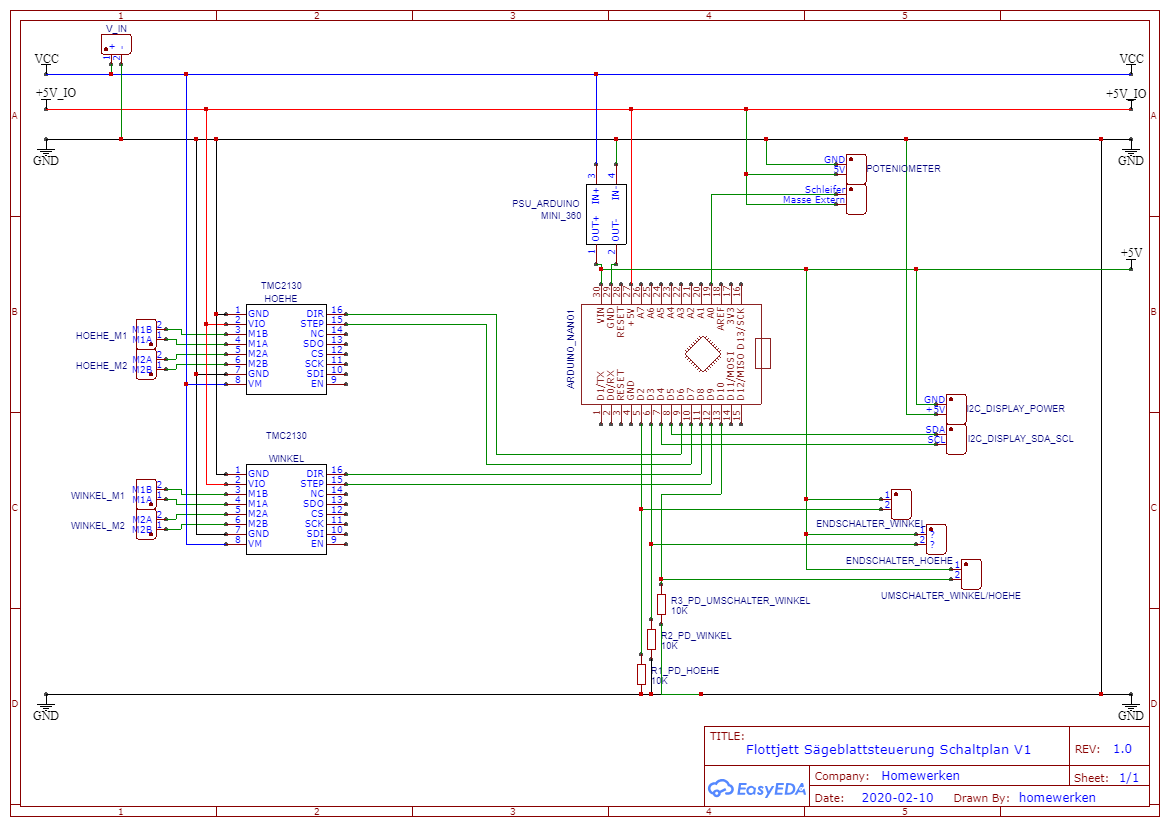
Hallo zusammen, schonmal vielen Dank für die unterstützung. Da ich mitlerweile ein wenig eingerostet bin hoffe ich das Ihr mir helfen könnt ;) also ich habe folgendes vor. Anbei schon mal ein Schaltplan ;) Die Steuerung soll für eine Kreissäge sein und einmal den Winkel und die Höhe des Sägeblattes steuerbar machen. Funktion wie folgt: Beim Starten fahren die beiden Schrittmotoren gegen die Endschalter. Dann soll mit einem Poti der eine Mittelstellung und Rückholfeder hat die Höhe bzw. der Winkel einstellbar sein. Ein Umschaltbar soll dem Arduino sagen ob die Höhe oder der Winkel mit dem Poti verendert werden kann. Könnt ihr euch den Plan mal angucken? Oder sind da gravierende Fehler drin? vielen Dank schonmal. grüße sebastian
Angehängte Dateien:
Ich habe jetzt, auf die Schnelle, keine Lust die Datenblätter der Motortreiber durchzuwühlen, aber bist Du Dir sicher, dass Enable und Chip-Select eine "Luftnummer" machen dürfen? Das Schalten der Motorspulen wird Dir wohl - ohne gründliche Filterung - den µC durcheinanderbringen. Oft hält man Motore, in ihrer aktuellen Position fest, indem man sie "Kurzschließt" oder beide Wicklungen auf null bzw. die positive Versorgungsspannung bringt. Viele Chips haben diese Option "eingebaut". Dafür reichen aber DIR und Step nicht aus.
Wie hoch sind bei dir VCC und die Nennspannung der Motoren?
Sebastian schrieb: > Oder sind da gravierende Fehler drin? Es fehlt fast die komplette Beschaltung des TMC2130. Guck dir mal die Fig. 1.1 auf S.5 im Datenblatt an. https://www.trinamic.com/fileadmin/assets/Products/ICs_Documents/TMC2130_datasheet_Rev1.11.pdf
Sebastian schrieb: > Anbei schon mal ein Schaltplan So wird das nichts. Es fehlt alles, was du nicht verstanden hast. Und das ist offenbar viel. Bedenke, dass nicht nur ein Prinzipschaltbild zu einer betriebssicheren, sich nicht stören und zerstören lassenden Schaltung führt, sondern dazu das ganze drumherum kommerzieller Platinen nötig ist. Gerade Mikroschritt-Schrittmotortreiber schalten hohe Ströme mit hoher Frequenz, und erzeugen Strom beim Bremsen oder drehen der Motorsdlle bei abgeschalteter Elektronik, der, wenn er nicht aufgdfangen wird, zum Ansteigrn der Soannung an den bei dir nicht vorhandenen Abnlockelkos führt, bis die Spannung reicht um die Elektronik zu zerstören. Masseführung, Eingangsschutz, Abblockung gehört auch dazu.
Wolfgang schrieb: > Wie hoch sind bei dir VCC und die Nennspannung der Motoren? wollte mit 12V starten
Sebastian schrieb: > wollte mit 12V starten Und welche Nennspannung haben die Motoren? Wenn die Motoren auch bei höherer Schrittfrequenz vernünftiges Drehmoment liefern sollen, muss die VM erheblich über der Nennspannung liegen. (s. Datenblatt des Motors)
Wolfgang schrieb: > Wenn die Motoren auch bei höherer Schrittfrequenz vernünftiges > Drehmoment liefern sollen Es geht um die Verstellung von Winkel und Höhe eines Sägeblatts. Ich glaube kaum, dass dem TO eine hohe Schrittfrequenz wichtig ist. Aus dem Datenblatt des TMC2130 entnehme ich "Voltage Range 4.75… 46V DC". 24V wäre sicher besser, 12V sollte aber auch gehen. Da du sowieso eine Untersetzung drin haben wirst, sollte das nicht das größte Problem sein. Handelt es sich bei dem TMC2130 um den SilentStepStick? Pin Functions: https://learn.watterott.com/silentstepstick/pinconfig/tmc2130/ Schaltplan: https://github.com/watterott/SilentStepStick/blob/master/hardware/SilentStepStick-TMC2130_v20.pdf
Bei I2C gehören Pull-Up Widerstände mit 5,6k Ohm an +5V dran. Außerdem sind SDA und SCL nicht am D4 & D5 sondern A4 (SDA), A5 (SCL). Alle GND vom µC bitte verbinden und Reset wird Low-Activ geschaltet ebenfalls mit einen Pull-Up Widerstand 10k Ohm an +5V dran.
Timo N. schrieb: > Es geht um die Verstellung von Winkel und Höhe eines Sägeblatts. Ich > glaube kaum, dass dem TO eine hohe Schrittfrequenz wichtig ist. Wenn die Versorgungsspannung der Nennspannung des Motors entspricht und man damit sowieso auf die Vorteile der Stromregelung verzichtet, kann man sich den Aufwand auch sparen. > Da du sowieso eine Untersetzung drin haben wirst, sollte das nicht > das größte Problem sein. Spätestens durch die Untersetzung steigt die Drehzahl des Schrittmotors entsprechend.
Vieles, was hier gesagt wurde, stimmt leider, die Ansteuerung von Schrittmotoren ist nicht trivial. Warum machst Du es Dir nicht einfach, indem Du Motore nimmst, die direkt für die Ansteuerung mit einem Microcontroller geeignet sind? Beispiele wären von Trinamic die PanDrive PD42-x-y-TMCL und PD57-x-y-TMCL, die haben direkte Eingänge - teilweise sogar mit Optokoppler isoliert - für DIR und STEP. Allerdings können die Motore nicht besonders schnell damit laufen, weil die Schnittstellen (auch des Arduino) zu langsam sind. Wenn es aber mehr auf Genauigkeit als auf Tempo ankommt, dann geht das m.E. sehr, sehr einfach.
Timo N. schrieb: > Wolfgang schrieb: >> Wenn die Motoren auch bei höherer Schrittfrequenz vernünftiges >> Drehmoment liefern sollen > Es geht um die Verstellung von Winkel und Höhe eines Sägeblatts. Ich > glaube kaum, dass dem TO eine hohe Schrittfrequenz wichtig ist. > > Aus dem Datenblatt des TMC2130 entnehme ich "Voltage Range 4.75… 46V > DC". 24V wäre sicher besser, 12V sollte aber auch gehen. Da du sowieso > eine Untersetzung drin haben wirst, sollte das nicht das größte Problem > sein. > Handelt es sich bei dem TMC2130 um den SilentStepStick? > Pin Functions: > https://learn.watterott.com/silentstepstick/pinconfig/tmc2130/ > Schaltplan: >https://github.com/watterott/SilentStepStick/blob/master/hardware/SilentStep>Stick-TMC2130_v20.pdf Ja genau. Vielen Dank für den Tipp. Ich habe nen Regelbares Netzteil. Ich teste einfach mal mit der Spannung und wenn ich 24V benötige dann wirds halt nen 24V Netzteil :)
Rainer S. schrieb: > Bei I2C gehören Pull-Up Widerstände mit 5,6k Ohm an +5V dran. > Außerdem > sind SDA und SCL nicht am D4 & D5 sondern A4 (SDA), A5 (SCL). > > Alle GND vom µC bitte verbinden und Reset wird Low-Activ geschaltet > ebenfalls mit einen Pull-Up Widerstand 10k Ohm an +5V dran. Vielen Dank das du dir so viel mühe gemacht hast und die Schaltung durchgeschaut hast. Pullup und SDA SCL habe ich korrigiert. Leider verstehe ich das mit dem reset nicht? vielen Dank. Anbei nochmal der aktualisierte Schaltplan.
svensson schrieb: > Vieles, was hier gesagt wurde, stimmt leider, die Ansteuerung von > Schrittmotoren ist nicht trivial. > > Warum machst Du es Dir nicht einfach, indem Du Motore nimmst, die direkt > für die Ansteuerung mit einem Microcontroller geeignet sind? > Beispiele wären von Trinamic die PanDrive PD42-x-y-TMCL und > PD57-x-y-TMCL, die haben direkte Eingänge - teilweise sogar mit > Optokoppler isoliert - für DIR und STEP. > > Allerdings können die Motore nicht besonders schnell damit laufen, weil > die Schnittstellen (auch des Arduino) zu langsam sind. Wenn es aber mehr > auf Genauigkeit als auf Tempo ankommt, dann geht das m.E. sehr, sehr > einfach. Vielen dank für den Tipp die Motoren kannte ich gar nicht! allerdings ist der Preis auch nicht ohne :/ Ich versuche erstmal so weiter zu kommen. Aus Fehlern lernt man ;)
Sebastian schrieb: > Leider verstehe ich das mit dem reset nicht? Kümmer dich nicht darum. Das wäre nur bei einem µC ATmega 328 ohne Beschaltung relevant. Auf dem Arduino Nano ist Reset schon mit einem Pull-up Widerstand mit 5V verbunden. Das passt also. Google einfach mal nach Arduino Nano Schematic, dann siehst du wie alles auf dem Nano verschaltet ist. D11,D12 und D13 wind übrigens die SPI Pins des Nano. Die könntest du mit beiden TMC2130 verbinden um sie flexibel programmieren zu können. Dann brauchst du noch 2 Pins für Chip Select (CS) für je einen der TMC2130. Wenn du SPI verwendest, um den TMC2130 zu programmieren, musst du Enable auf jeden Fall auf einen Pin legen oder direkt auf GND und ihn damit dauerhaft einzuschalten.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.