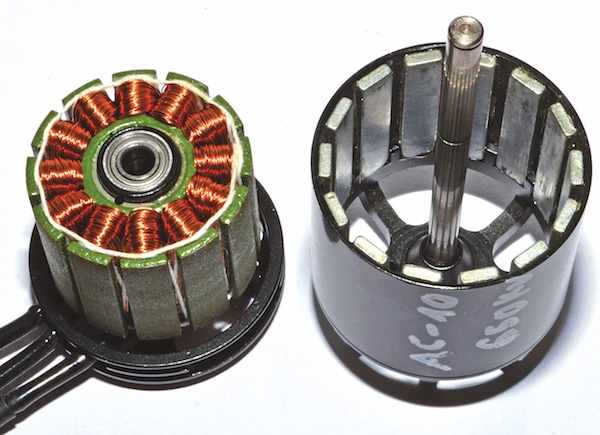

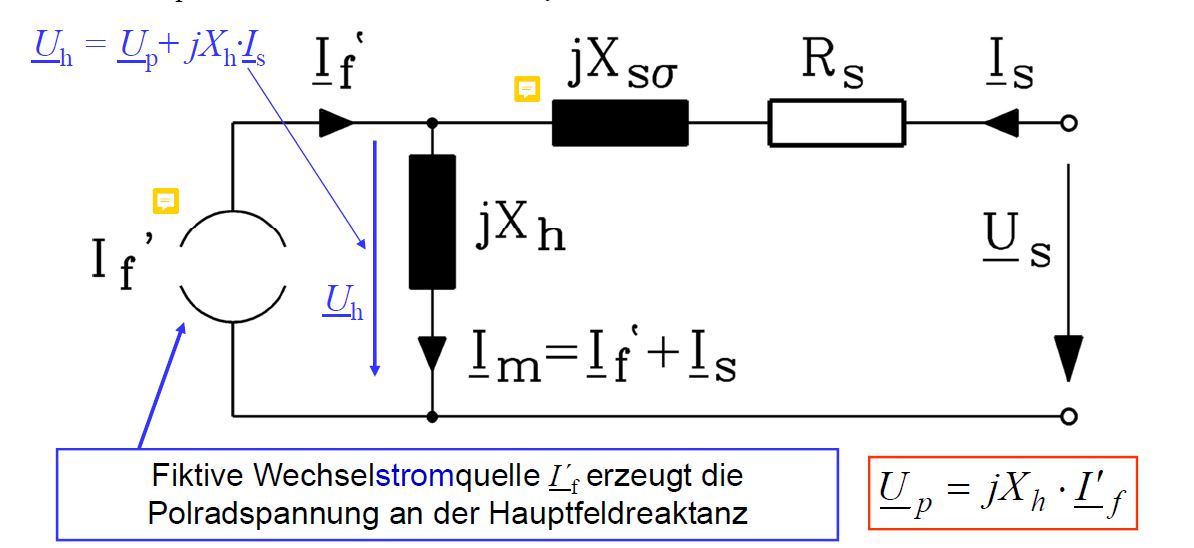
Hallo, ich hätte einige Fragen zum BLDC Motor und bin auch für weitere Literaturvorschläge sehr dankbar. 1) Der BLDC Motor entspricht ja dem Aufbau einer PM Synchronmaschine in der Uni hatten wir hier immer gelernt das Pole Stator = Pole Rotor sind bei meinem BLDC Motor im Modell-Flugzeug ist das nicht der Fall hier sind mehr Pole im Rotor als im Stator zu finden warum ist das so? Ist das dann eine Spezielle Art der Synchron-Maschine?(Bild 1) 2) Falls es eine PM Synchron Maschine ist welche Art von Synchron-Maschine entspricht das dann? Vollpol/ Schenkel pol? 3) In der Uni hatten wir immer nur die Fremderregte Synchron Maschine behandelt das heißt wir konnten von außen einen Strom über Schleifringe anschließen mit welcher wir das magnetische Feld des Rotors beeinflussen konnten das ist ja hier nicht mehr der Fall nun haben wir Permanent Magneten wie modelliere ich das nun in meiner Gleichung für Up (Bild 2,Bild 4)? Up konnte man vorher immer einstellen (durch die Erreger-Einrichtung) und jetzt nicht mehr da wir nun Dauermagneten verwenden.Habe ich dann einfach einen konstanten erreger Strom mit konstantem Betrag und konstanter Phase? 5) Kann ich das ESB aus (Bild 2,Bild 4) für meinen BLDC Motor aus (Bild1) überhaupt verwenden? 6) Ich habe jetzt in mehreren Application Notes gelesen das es wohl mehrere BLDC Motoren gibt und man hierbei zwischen Trapezförmiger und Sinusförmiger Back EMF unterscheiden muss. Ich verstehe nicht wie hier irgendwas Trapezförmiges rauskommen soll.Desweiteren habe ich den Motor aus (Bild 1) generatorisch angetrieben und bekomme am Oszi eine sinusförmige Back EMF. 7) Warum ist es jetzt im Regelverhalten überhaupt eine DC Maschine also Spannung ~ Drehzahl //Strom~Drehmoment wie kommt da die Verbindung zusammen ich habe ja eigentlich eine Synchronmaschine mit folgendem Drehmoment Verlauf abhängig vom Polradwinkel (Vollpol Maschine). (Bild3) 8) Weiterhin fände ich mal eine Drehzahl Drehmoment Kennlinie eines BLDC Motors ganz interessant auf Wikipedia habe ich dazu nur sehr grobe Skizzen gefunden, jedoch keine Konkreten Bilder eines Bsp. Motors. 9) Wie ist das jetzt eigentlich mit der Back EMF diese müsste ja wieder meinem UP entsprechen oder? Das Problem was ich hier noch sehe ist wenn ich nun Us anlege dann steigt ja meine Back EMF an (aufgrund der steigenden Drehzahl)bis sich ein Gleichgewicht einstellt und mein Strom dann 0 ist heißt das dann -> Volle Drehzahl -> 0 Drehmoment? 10) Was ist nun für den Wirkungsgrad und den Betrieb des BLDC am besten Sinus PWM oder Block Modulation? Ich hätte gesagt Sinus PWM da wir ja auch einen Sinus generatorisch bekommen oder? Vielen Dank im Voraus :) Quellen: 1)https://link.springer.com/book/10.1007/978-3-540-71850-5 2)https://www.rotor-magazin.com/basiswissen-aufbau-und-funktion-von-brushless-motoren/ 3)https://de.wikipedia.org/wiki/B%C3%BCrstenloser_Gleichstrommotor
Jonas schrieb: > ich hätte einige Fragen zum BLDC Motor und bin auch für weitere > Literaturvorschläge sehr dankbar. Hier gibt es einige Vorschläge (Videos): https://www.youtube.com/results?search_query=great+scott+bldc
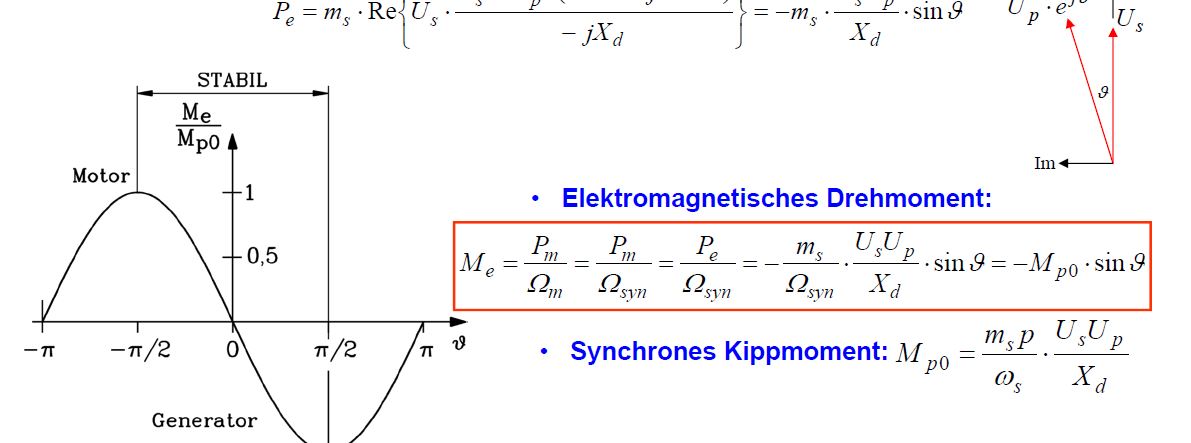
> 7)
Warum ist es jetzt im Regelverhalten überhaupt eine DC Maschine also
Spannung ~ Drehzahl //Strom~Drehmoment wie kommt da die Verbindung
zusammen ich habe ja eigentlich eine Synchronmaschine mit folgendem
Drehmoment Verlauf abhängig vom Polradwinkel (Vollpol Maschine). (Bild3)
Weil der Motor im ganzen eben eine Gleichstrommaschine ist. Es wurde
lediglich der mechanische Kommutator durch Transistorschalter ersetzt.
Die Elektronik ist fundamentaler Bestandteil des Motors. Entweder über
Hallsensoren oder die Gegeninduktionsspannung wird die aktuelle
Rotorposition gemessen und danach der Strom nach einer Tabelle Trapez-
oder Sinusförming durch die Spulen geschickt.
Im Gegensaztu dazu ist ein Synchronmotor prinzipiell an ein
Drehstromnetz mit fester Frequenz angeschlossen.
A-Freak schrieb: > Im Gegensaztu dazu ist ein Synchronmotor prinzipiell an ein > Drehstromnetz mit fester Frequenz angeschlossen. Erstmal danke für deine Antwort aber eine Synchron-Maschine kann ich ja auch an einem Frequenz Umrichter mit variabler Spannung und variabler Frequenz betreiben mir sind hier die Unterschiede zwischen BLDC und Synchron-Maschine einfach nicht klar.
Jonas schrieb: > die Unterschiede zwischen BLDC und > Synchron-Maschine Der BLDC ist eine Unterart der Synchronmotoren. Der wird ja auch PMSM genannt - Permanent Magnet Synchronous Motor. Aufpassen muss man im Detail, ob mit einem BLDC auch im Kontext einer Aufgabe die Kommutationselektronik mit gemeint ist.
Jonas schrieb: > eine Synchron-Maschine kann ich ja > auch an einem Frequenz Umrichter mit variabler Spannung und variabler > Frequenz betreiben mir sind hier die Unterschiede zwischen BLDC und > Synchron-Maschine einfach nicht klar. Bei einer Synchron-Maschine dreht der Rotor synchron zur angelegten Frequenz, bei einem BLDC (oder auch einem DC-Motor) ist die Frequenz synchron zur Drehung. Er braucht daher zwingend einen Wechselrichter, entweder mechanisch mit Bürsten oder elektronisch mit Halbleitern. MfG Klaus
@ Jonas (Gast) > Erstmal danke für deine Antwort aber eine Synchron-Maschine kann ich ja auch an einem Frequenz Umrichter mit variabler Spannung und variabler Frequenz betreiben Richrtig, das ist dann aber eine Zusatzfunktion. Genauso wie im DC-Motor der Glöeichstromsteller zur Drehzahleinstellung eine Zusatzfunktion ist. > mir sind hier die Unterschiede zwischen BLDC und Synchron-Maschine einfach nicht klar. Am besten erkläre ich das mit den Motorklemmen: Ein DC-Motor hat in seiner grundsätzlichen Form zwei Klemmen, Plus und Minus. Die werden vom Kommutator, mechanisch gekoppelt an die Ankerposition, auf die verschiedenen Wicklungen durchgeschaltet. Der Polradwinkel ist durch die mechanische Verbindung vom Läufer zum Kommutator festgelegt. Die Drehzahl wird davon bestimmt daß die Gegeninduktionsspannung vom rotierendem Motor so groß wie die äußere Betriebsspannung wird. Man kann einen zusätzlichen Gleichspannungssteller, z.B. mit PWM anschließen um die Drehzahl zu steuern oder mit Rückführung zu regeln. Ein BLDC-Motor hat in seiner grundsätzlichen Form zwei Klemmen, Plus und Minus. Die werden von einer Transistorbrücke, per Software an die gemessene Ankerposition gekoppelt, auf die verschiedenen Wicklungen durchgeschaltet. Der Polradwinkel ist durch die Transistoransteuerungstabelle festgelegt. Die Drehzahl wird davon bestimmt daß die Gegeninduktionsspannung vom rotierendem Motor so groß wie die äußere Betriebsspannung wird. Man kann die Funktion eines Gleichspannungsstellers, z.B. mit PWM in die vorhandenen Transistoren mit integrieren um die Drehzahl zu steuern oder mit Rückführung zu regeln. Ein Synchronmotor hat in seiner grundsätzlichen Form drei Klemmen, U V und W und diese werden an ein Drehstromnetz angeschlossen das das Drehfeld vorgibt. Man kann die Spannung und Frequenz dieses Netzes verändern um die Drehzahl vorzugeben. Der Polradwinkel ergibt sich durch die Last.
@Klaus (Gast) Du hast es deutlich kompakter auf den Punkt gebracht.
A-Freak schrieb: > Weil der Motor im ganzen eben eine Gleichstrommaschine > ist. Das ist falsch. In einer Gleichstrommaschine bleibt die Lage des Magnet- feldes im Wesentlichen erhalten; bei einer Synchron- maschine und bei einem BLDC läuft es um. Diese blödsinnige Diskussion würde sich erledigen, wenn man, wie in der guten alten Zeit üblich, sauber zwischen dem MOTOR (=der rotierenden elektrischen Maschine) und dem ANTRIEB (=der Baugruppe) unterscheiden würde.
Egon D. schrieb: > Das ist falsch. Hiermit ist die µC-Forum-Wortklauberei dann wohl eröffnet. Bisher waren es ja eigentlich gute und hilfreiche Beiträge.
Danke nochmal für die Antworten leider sind diese recht ungenau
Auch wenn das Thema schon etwas älter ist und ich jetzt hierauf gestoßen bin, da ich nach einem ähnlichen Thema gesucht habe, versuch ich die Fragen mal zu beantworten. Ggf. hilft es jemanden, der nach dem Thema sucht. 1) BLDC steht für brushless DC und die Literatur verweist oft auf Synchronmaschinen. Gemeint sind jedoch alle E-Maschinen, die vom black box Verhalten, also vom Klemmverhalten, einer klassischen DC-Maschine ähneln und ohne Bürsten/Kommutatoren auskommen. Synchronmaschinen (in typischen BLDCs) sind eigentlich klassische Drehstrommaschinen. Durch die Verwendung eines Wechselrichter sind sie per DC betreibbar. Wie du erkannt hast, stimmen die Anzahl der Pole im Rotor und im Stator nicht überein. Damit kann es keine Synchronmaschine sein. Der Aufbau weißt auf eine Reluktanzmaschine. Hier müssen vom Prinzip her die Anzahl der Pole unterschiedlich sein. 2) Wenn wir die unterschiedliche Anzahl an Polen mal ignorieren und es eine PSM wäre, dann ist es eine Schenkelpolmaschine, da die Pole deutlich ausgeprägt/zu sehen sind. 3) Da es sich um eine geschaltete Reluktanzmaschine handelt, kann der Gleichungssatz nicht angewendet werden. 4) Bei einer PSM ist deine Annahme mit dem konstanten Strom korrekt. 5) Ja, das geht für PSMs, für deinen Fall der Reluktanzmaschine, meiner Kenntnis nach, nicht. 6) Mir sind nur „trapezförmige“ Ansteuerungen bekannt. Die BackEMF oder Polradspannung ist eigentlich sinusförmig. Andernfalls bricht das Kartenhaus namens Zeigerdiagramm zusammen. 7) Leerlaufspannung ~ Drehzahl nennt man Induktionsgesetz und hat nichts mit dem Maschinentyp zu tun. Da die Leistungsbilanz gilt, erhält man bei kleinen Drehzahl hohe Momente und bei hohen Drehzahlen kleine Momente gemäß U*I * eta(Arbeitspunkt) = M*n Die Darstellung mit dem Kippmoment sollte man sowieso vergessen. Das gilt alles für netzgeführte Maschinen. BLDCs als PSM sind jedoch im Inselbetrieb. 8) Bei BLDCs als PSM, einfach mal nach PSM suchen. Kennlinien sollten sehr ähnlich aussehen. Bei Reluktanzmaschinen wie hier, wird es schwere, da die nicht so weit verbreitet sind. Hier helfen Skripte aus Unis, oder Fachliteratur-> Uni-Bibo weiter. 9) Hier hielt das Zeigerdiagramm weiter. Das Diagramm hat Randbedingungen, je nach Maschinentyp, die immer !! gelten. Da die Leistungsbilanz gilt, heißt hohe Drehzahlen = kaum Moment. 10) Prinzipiell ist der Block besser, da man sich die Schalverluste der Sinuskommutierung erspart. Aufgrund von technischen Randbedingungen kann der Block jedoch nicht immer eingesetzt werden (z.B. zu geringe Induktivität, Polradspannung zu gering, ...).
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.