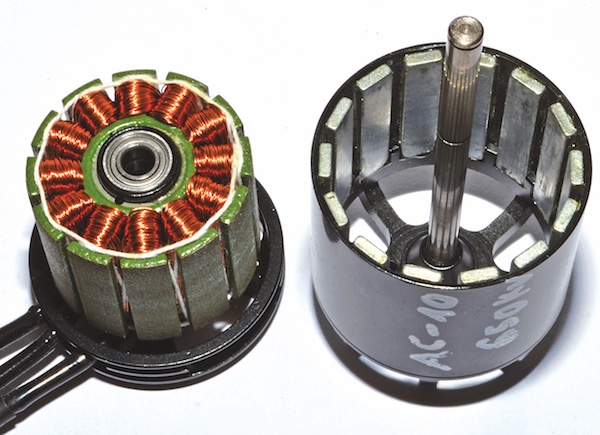
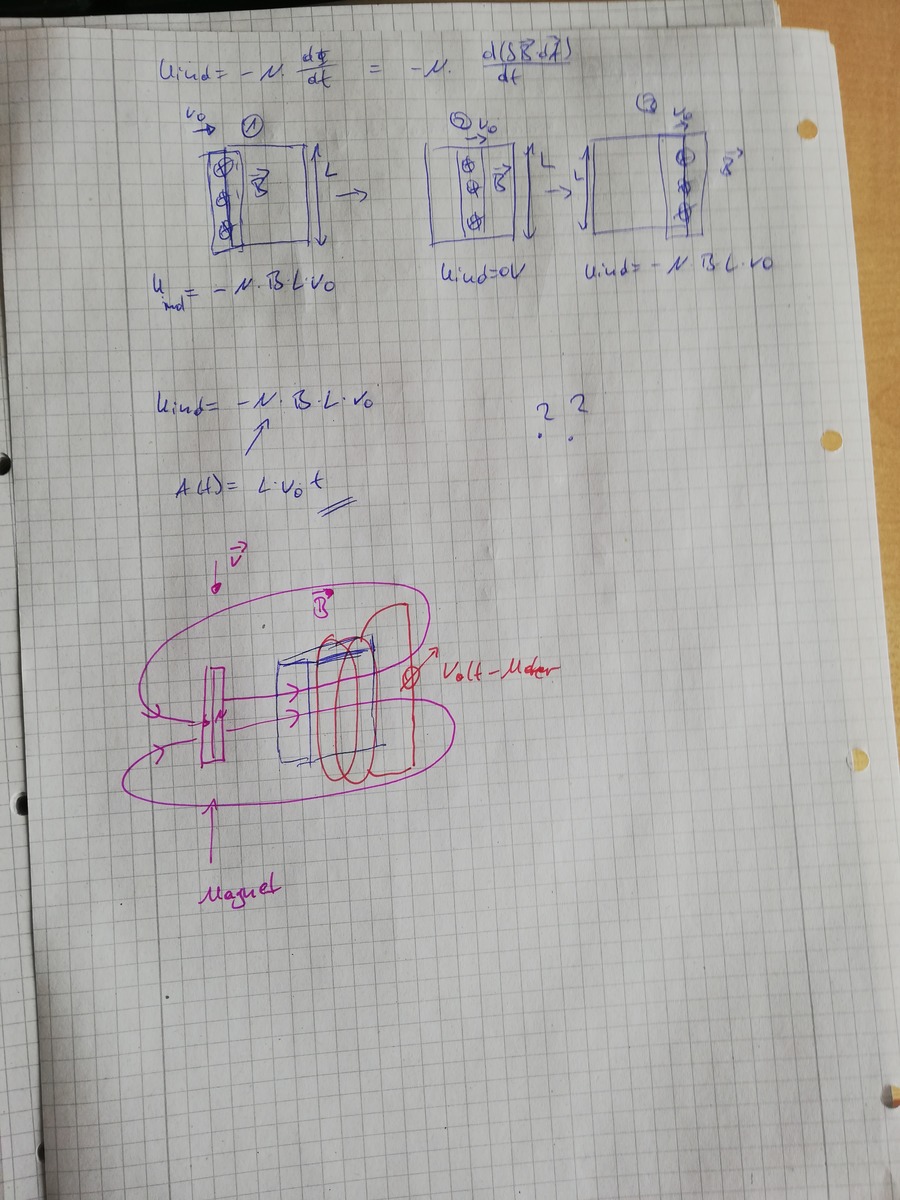
Hi, ich hätte ein paar Fragen zum BLDC: 1) ich verstehe nicht warum bei dem BLDC aus (Bild 1) eine sinusförmige Spannung als Back EMF raus kommt wenn ich diesen am Oszi vermesse, ich hätte eine konstante Back EMF erwartet siehe (Bild2) mein Magnet fährt ja hier über die einzelnen konzentrischen Spulen und erzeugt nach dem Induktionsgesetz eine konstante Spannung solange die Geschwindigkeit konstant ist und das ist sie ja bei fester Drehzahl. 2) Wie soll ich nun eine solche Maschine ansteuern mit Sinus-PWM oder mit Barockmodulation also welches Verfahren ist für den Wirkungsgrad des Motors am besten? Danke im Vorraus
Wahrscheinlich wäre es hier besser mit Sinus-PWM zu arbeiten da ich ja auch eine Sinus Back EMF bekomme oder?
Am einfachsten Hall-Sensoren anbringen und nicht mit BEMF herumschlagen wenn du es nicht verstanden hast warum da ein Sinus raus kommt. Hat sowieso mehrere Vorteile Sensoren zu verwenden.
Ist für die Kommutierung egal wie die BackEMF aussieht. ES wird ohnehin über eine Komparatorenschaltung verwendet um die Positionssignale zu erhalten. Bei deinem Kenntnisstand würde ich aber zur Blockkommutierung raten, ist leichter in den Griff zu bekommen. Da ja im Stillstand keine BackEMF da ist läuft er Motor ja nicht von selbst an. Da muss man noch eine Zwangskommutierung vorsehen, ist aber Tricky da das nur Lastfrei funktioniert. Es gab mal en Ansatz 'Virtual Hall' was auch aus dem Stand Power bringen sollte, doch ausser einem Messemuster hab ich davon nichts gesehen. Die Firma hatte sich mit dem Erfinder überworfen und so kam nie ein fertiger IC bei raus.
Steffen W. schrieb: > Ist für die Kommutierung egal wie die BackEMF aussieht Das die Kommutierung und meine Back EMF 2 verschieden Sachen sind weiß ich auch haha. ich wollte lediglich wissen bei welcher Kommutierungsart der bester Wirkungsgrad zu erwarten ist und warum es manche BLDCs gibt die eine Blockförmige Back EMF bzw. eine Sinusförmige Back EMF erzeugen. Das hat anscheinend was mit der Wicklungsart bzw. der Aufmagnetisierung der Magnete zu tun.
Was mich auch interessieren würde ist was bei einem BLDC welcher eine sinusförmige Back EMF herraus kommt wenn ich diesen immer mit Blockmodulation ansteuer. Dabei bestrome ich ja immer 2 Phasen und die andere floatet. Zunächst müsste ich da ja einen kleinen Spannungs-Peak bekommen weil sich meine Spule entläd und dann müsste ich eine induzierte Spannung bekommen aber wie sieht die dann aus anscheinend sinusförmig oder? Ich verstehe aber nicht warum... siehe obige Berechnung natürlich ist mein bild stark vereinfacht und ich weiß auch nicht wie meine Spulen gewickelt sind, oder wie mein Magnet aufmagnetisiert wurde. ich hab die Annahme konzentrische Spulen getroffen und für den Magenten habe ich eine konstante Feldstärke angenommen.
Eine Rechteck EMF beim Motor habe ich noch nicht gesehen. Da ja der Übergang der Spule zum Magnetfeld bei der Drehung nicht schlagartig erfolgt ergibt sich eine sinusähnliche Signalform. Mit der Form der Ansteuerunng hat das nichts zu tun. Such Dir am besten einen Artikel im WEB der die Grundlagen zum BLDC erklärt. Und sieh Dir mal ein Bild des Magnetflusses der Magnete im Motor an. Da wird auch einiges klar. Wie die Spulen auf dem Stator verteilt liegen ist recht einfach mit einem Nagel und einer Spannung die an die jeweilige Wicklung angelegt wird herauszubekommen.
Steffen W. schrieb: > Mit der Form der > Ansteuerunng hat das nichts zu tun. Also ist es egal wie ich den BLDC ansteure Block oder Sinus Pwm geht beides (in jedem Fall)?
Natürlich kann ein BLDC sowohl mit Sinuskommutierung als auch mit Block betrieben werden. Sinus ist nur schwieriger in den Griff zu bekommen. Block geht sogar auch ohne Microcontroller mit Logikbausteinen + Signalaufbereitung. Bei Motoren mit Sensoren (beispielsweise die üblichen Fahrradmotoren aus China) funktioniert Sinus oft nicht da die Sensoren die Position nicht exakt genug bestimmen können damit der Ansteuervector immer stimmt. Habe hier eine Abhandlung darüber wie mit einem analogen und einem digitalen Hallsensor abgetastet wird und eine funktionierende Sinusansteuerung damit realisiert wird. Liegen noch einige Motoren hier die auch laufen, nur hat das System den Nachteil das jeder Controller auf den jeweiligen Motor abgeglichen werden muss. Mit 4 Trimmern die auch noch sich teilweise gegenseitig beeinflussen recht fummelig.
Hier ein Link fuer das generelle Vertaendnis von Stepper und BLCD-Motoren.Nett finde ich die Anmimationen.Eventuell wird auch auch auf das Anliegen des TOs eingegangen und wenn nicht:Fuer Newbies ist allemal interessant.... https://de.nanotec.com/knowledge-base/knowledge-base-pages/schrittmotor-animation/?tx_nanotec_animation%5Binitial%5D=motor_4lead&cHash=101d605e2a66cd40d55f422d77b3a0b6
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.