
Hallo Leute, ich möchte einen Motor mit Hilfe einer H-Brücke (IC DRV8432DKDR) ansteuern. Die ganze Regelung für den Motor funktioniert schon mal so wie gewünscht. Der Motor hat einen Innenwiderstand von 3,9Ohm und eine Induktivität von 90uH. Jetzt habe ich das Ausgangssignal mit einem Oscilloscope untersucht. Dabei habe ich festgestellt das die ansteigende Flanke nicht besonders sauber ist und eine Störrung vorhanden ist. Dies würde ich aus EMV-Gründen gerne elemenieren. Da ich die PID Regelung so wenig mie möglich beeinflussen möchte habe ich an einen LC Filter (Bessel) gedacht. Die Bauteilwerte sind dann 560nH und 820pF. Ich würde gerne die MAPI Serien von Würth verwenden und habe auch eine Induktivität von 560nH gefunden. Die Resonazfrequenz der Induktivität liegt bei 85MHz. Die Grenzfrequenz des Filters liegt bei ca. 8.2MHz somit habe ich ab 30MHz eine Dämpfung von ca. 19dB. (ab 30MHz wird in der EMV Kammer gemessen). Das Problem ist nur wenn ich den Filter einlöte dann erhalte ich kein sauberes 100kHz PWM Signal sondern ich verstärke sehr stark die Störrung genau dies möchte ich nicht. Durch die Induktivität fließt ca. 1A RMS bei 12V. Daher denke ich nicht das ich hier einen RC Tiefpass nehmen kann. Den Schaltplan habe ich beigefügt. Wie kann ich den Filter optimieren. Ich bin bei dem Filterdesign von 50 OHm ausgegangen. Ich denke das war mein Fehler da die Motor ja nur einen Innenwiderstand von 3.9Ohm besitzt.
Angehängte Dateien:
-

Tiefpass.png
110 KB
Kommen die Störungen vielleicht von der Versorgung wegen mangelhafter Abblock Kondensatoren? Filter in den Motor Phasen sind ja eher untypisch, auch wenn ich sowas schonmal bei großen Umrichtern gesehen habe. Sinusfilter heißen die wenn ich mich recht entsinne.
Michael schrieb: > Dabei habe ich festgestellt das die ansteigende Flanke nicht besonders > sauber ist und eine Störrung vorhanden ist. Zeig doch mal. Eine zusätzliche Induktivität von 560nH wird nicht viel ausrichten bei einer sowieso vorhandenen 150x größeren Motorinduktivität.
Wenn du das Filter berechnen willst, dann bei der Impedanz vom Motor. Kannst ja den LC-Filter Designer von Ti nutzen. https://www.ti.com/tool/LCFILTER-CALC-TOOL Wie schon erwähnt sind gute Abblockkondensatoren Pflicht, evtl. auch ein Snubber. Und natürlich auch ein optimiertes PCB-Layout. Aus eigenem Interesse, wie machst du das mechanisch mit dem Kühlkörper, welche Wärmeleitpaste benutzt du?
Michael schrieb: > Induktivität von 90uH. Jetzt habe ich das Ausgangssignal mit einem > Oscilloscope untersucht. Dabei habe ich festgestellt das die ansteigende > Flanke nicht besonders sauber ist und eine Störrung vorhanden ist. Zeige einen Screenshot. Zeige uns ein Bild deines Meßaufbaus. Wahrscheinlich ist deine Störung unkritisch oder ein Meßfehler. https://www.mikrocontroller.net/articles/Oszilloskop#Tastk.C3.B6pfe_richtig_benutzen > Dies > würde ich aus EMV-Gründen gerne elemenieren. Nö, denn du weiß ja noch gar nicht, ob und wie sich diese "Störung" auf die EMV auswirkt. > Das Problem ist nur wenn ich den Filter einlöte dann erhalte ich kein > sauberes 100kHz PWM Signal sondern ich verstärke sehr stark die Störrung > genau dies möchte ich nicht. Klingt nach Meßfehler. > Durch die Induktivität fließt ca. 1A RMS > bei 12V. Daher denke ich nicht das ich hier einen RC Tiefpass nehmen > kann. Sicher nicht. > Den Schaltplan habe ich beigefügt. Wie kann ich den Filter optimieren. Muss man jetzt noch gar nicht. Man muss erstmal richtig messen und nachdenken. > Ich bin bei dem Filterdesign von 50 OHm ausgegangen. Was hier eher nicht sinnvoll ist, denn du hast kein 50 Ohm System. > Ich denke das war > mein Fehler da die Motor ja nur einen Innenwiderstand von 3.9Ohm > besitzt. Auch das ist nicht der richtige Ansatz, denn die 3,9R sind nur der ohmsche Wicklungswiderstand. Der ist NICHT der Wellenwiderstand und auch nicht der effektive Eingangswiderstand des Motors. Der liegt höher, eher Richtung Nennspannung / Nennstrom, hier ca. 12 Ohm.
Michael schrieb: > Dabei habe ich festgestellt das die ansteigende Flanke nicht besonders > sauber ist und eine Störrung vorhanden ist. Ja, lass mal sehen! Und auch ein Foto vom Messaufbau dazu. > eine Störrung vorhanden ist. > Dies würde ich aus EMV-Gründen gerne elemenieren. Warum? Führt diese "Störung" zu Problemen in deiner Schaltung oder bei der EMV-Konformität? > Dies würde ich aus EMV-Gründen gerne elemenieren. Ich finde bei den meisten derartigen "Problemen" entweder einen Messfehler oder einen Layoutfehler. Kannst du diese beiden Fehlerquellen sicher ausschließen? EDIT: Oha, nur Zweiter... ;-)
:
Bearbeitet durch Moderator
Angehängte Dateien:
-

Filter_PWM_Class-D.png
93 KB
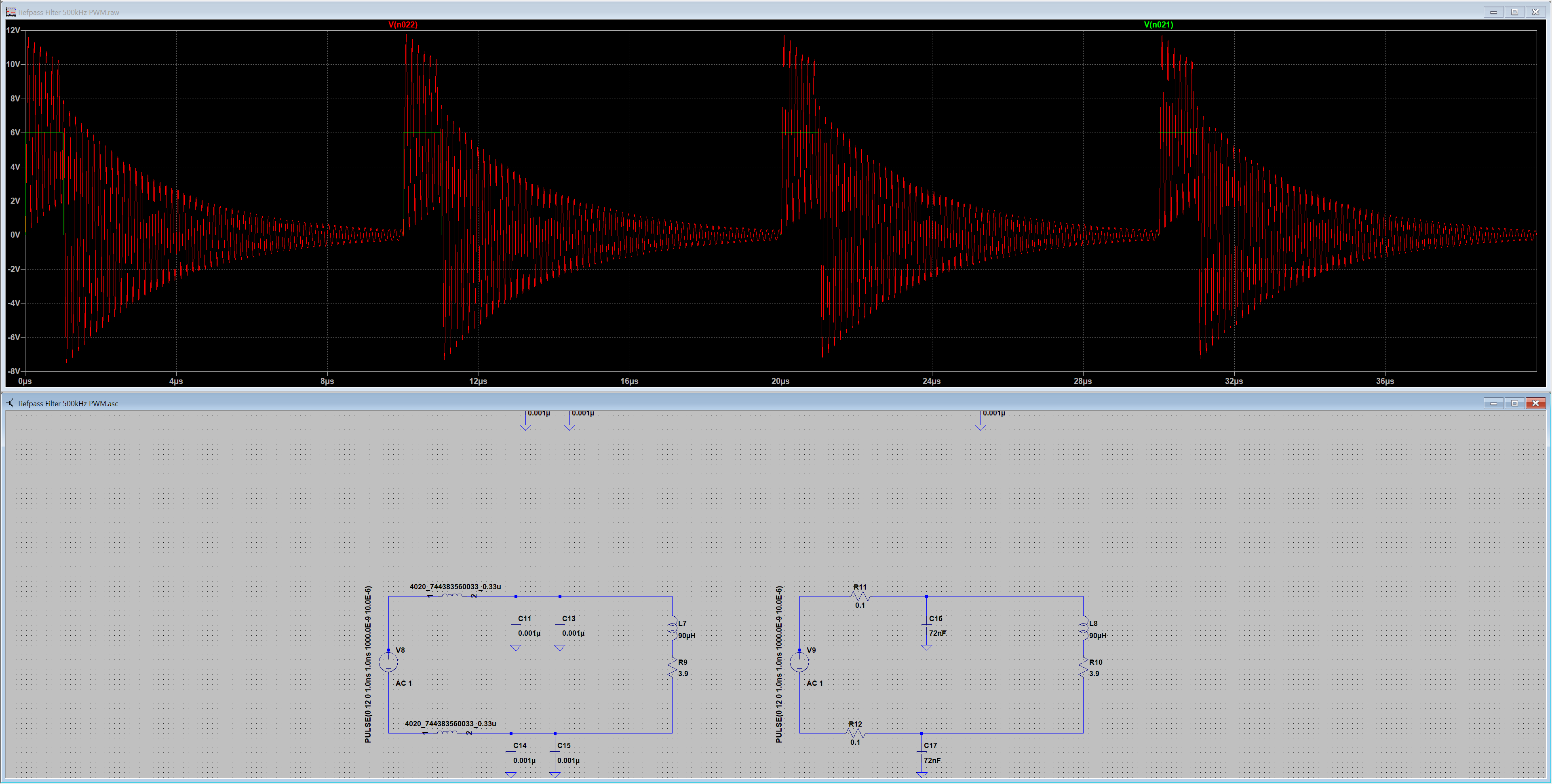
Ich habe die Schaltung mal in LT-Spice nachgebildet. Dort sehe ich den gleiche Effekt wie mit dem Oscilloskope. Dahe rist dies kein Messfehler wie hier einige behaupten.
Michael schrieb: > Den Schaltplan habe ich beigefügt. Wie kann ich den Filter optimieren. > Ich bin bei dem Filterdesign von 50 OHm ausgegangen. Ich denke das war > mein Fehler da die Motor ja nur einen Innenwiderstand von 3.9Ohm > besitzt. Warum das Filter auf Masse beziehen? Ich würde es symmetrisch machen und eine stromkompensierte Drossel pro Motor einsetzen. MfG Klaus
Die Induktivitäten haben auch unsinnig kleine Werte. Setze doch welche mit Eisenpulverringkern ein, der bei der Resonanzfrequenz bereits wirksam dämpft.
Die Iduktivitäten haben so einen kleinen Wert da es einen PID Regelkreis gibt der so wenig wie möglich beeinflusst werden soll. Außerdem soll der Formfaktor sehr klein sein. Hier bieten sich die MAPI 4020 Serie besonders an. Auch eine deutlich größere Induktivität verringert das Schwingen nicht. Ich habe auch einen Kondensator zwischen den beiden Ausgängen gehängt. Dies löst das Problem leider auch nicht außer das sehr viel Strom über diesen Kondensator fließt und ich die Leistung dort verbrate.
Michael schrieb: > Ich habe die Schaltung mal in LT-Spice nachgebildet. Dort sehe ich den > gleiche Effekt wie mit dem Oscilloskope. Leider ist auch aus dem Screenshot nicht zu erkennen, was du da nun eigentlich misst. Michael schrieb: > Die Iduktivitäten haben so einen kleinen Wert da es einen PID Regelkreis > gibt der so wenig wie möglich beeinflusst werden soll. Von nix kommt nix. Michael schrieb: > Ich habe auch einen Kondensator zwischen den beiden Ausgängen gehängt. > Dies löst das Problem leider auch nicht außer das sehr viel Strom über > diesen Kondensator fließt und ich die Leistung dort verbrate. Korrekt und logisch.
Wenn man die Resonanzfrequenz für den gezeichneten Tiefpass ausrechnen will, kann man für die erste Näherung den Motor vernachlässigen, da dessen Widerstand und auch die Induktivität klein gegenüber den anderen Impedanzen ist. Dann kann man die Spulen und die Kondensatoren zusammenfassen und erhält eine Kapazität von 4 nF und eine Induktivität von 0,66 mH. Das ergibt eine Resonanzfrequenz von fast 100 kHz und "passt" somit zur PWM-Frequenz. Nun tritt bei einem Reihenkreis (und um einen solchen handelt es sich hier) am Kondensator eine Spannungsüberhöhung auf. Und die so erhöhte Spannung wird über die Zuleitungen des Motors optimal nach außen abgestrahlt. Also für mich ist die Verstärkung der Störung nicht sonderlich verwunderlich.
Michael schrieb: > Auch eine deutlich größere Induktivität verringert das > Schwingen nicht. Gehe einmal davon aus, daß Du ein Phantom jagst. Elektromotoren an H-Brücken gibt es noch und noch. Nur Du hast ein Problem damit.
Michael schrieb: > Jetzt habe ich das Ausgangssignal mit einem > Oscilloscope untersucht. Dabei habe ich festgestellt das die ansteigende > Flanke nicht besonders sauber ist und eine Störung vorhanden ist. Zeige doch mal! Ohne diese Info können wir doch gar nicht wissen, ob dein Lösungsvorschlag sinnvoll sein kann. Michael schrieb: > Das Problem ist nur wenn ich den Filter einlöte dann erhalte ich kein > sauberes 100kHz PWM Signal sondern ich verstärke sehr stark die Störrung > genau dies möchte ich nicht. Auch das solltest du zeigen. Foto vom Aufbau (Leitungsführung) und natürlich das Oszilloskop-Bild. Aus dem Bauch heraus würde ich nicht ohne besondere Not einen Teil der Ausgangsleistung nach GND kurzschließen wollen. Damit verplempert man nur Energie und schafft sich neue EMV Probleme, wenn man das Layout falsch macht. Ich denke, das für EMV die Ströme erheblich interessanter sind, als die Spannungen. Und das ist in diesem Fall ein gewaltiger Unterschied, weil die Last Induktiv ist. Spulen "wollen" den Strom konstant halten, was dir sehr gut entgegen kommt. Also versuche nicht, die "Störungen" von der Spule des Motors fern zu halten, damit bewirkst du genau das Gegenteil, als beabsichtigt, wie du siehst. Die bekommt damit zwar den Spannungsverlauf entschärft, machst du aber den Stromverlauf schlimmer.
Stefan ⛄ F. schrieb: > Aus dem Bauch heraus würde ich nicht ohne besondere Not einen Teil der > Ausgangsleistung nach GND kurzschließen wollen. Hinzu kommt, dass ein Reihenkreis für seine Resonanzfrequenz einen Kurzschluss darstellt, bzw. die Quelle "sieht" nur noch die ohmschen Widerstände. Das kann die Quelle überlasten. Außerdem kann bei Resonanz die Spannung am Kondensator erheblich größer als die eingespeiste Spannung sein. So kann man auch mit recht kleinen Eingangsspannungen die Spannungsfestigkeit des Kondensators überschreiten.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.