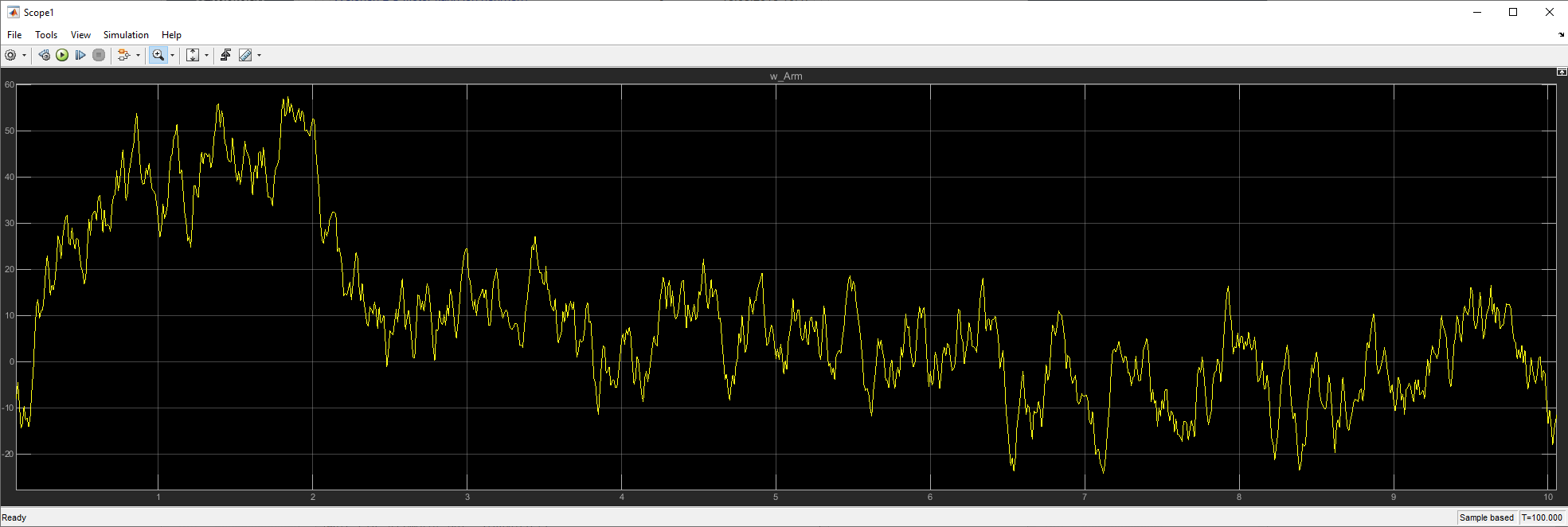
Hallo, ich stehe vor der Wahl eines Motors für ein inverses Pendel, das ich aufbauen möchte. Folgenden Motor hätte ich mir rausgesucht: https://www.pollin.de/p/dc-getriebemotor-zhaowei-zwpd024024-36-p-12-v-135-u-min-310588 Diesen würde ich vermutlich über ein L293D ansteuern. Da mein Pendel in der Simulation die ich bereits erstellt habe in der inversen Position relativ häufig die Richtung wechselt frage ich mich, ob dies mit meinem Motortreiber oder dem Motor selbst Probleme geben könnte. Wäre ein Stepmotor ggf. sinnvoller? Die errechneten Spitzengeschwindigkeiten aus meiner Simulation sind relativ gering bei maximal 30 rpm. Das Drehmoment sollte stets unter 0.1 Nm bleiben. Das angehängte Bild zeigt den errechneten Verlauf der Geschwindigkeit in deg/s über einen Zeitraum von 10 s. Denkt ihr das macht mein Motor und Treibermodul so mit oder hättet ihr alternative Empfehlungen?
Angehängte Dateien:
-

Arm_geschwindigkeit.PNG
28 KB
:
Bearbeitet durch User
Anno .. schrieb: > Hallo, > > ich stehe vor der Wahl eines Motors für ein inverses Pendel, das ich > aufbauen möchte. > Folgenden Motor hätte ich mir rausgesucht: > https://www.pollin.de/p/dc-getriebemotor-zhaowei-zwpd024024-36-p-12-v-135-u-min-310588 Ob der mit 135U/min schnell genug ist? Das sind gerade mal reichlich 2U/s. > ob dies mit meinem Motortreiber oder dem Motor selbst Probleme geben > könnte. Die kann es immer geben. >Wäre ein Stepmotor ggf. sinnvoller? Nö. Die meisten schnellen Servomotoren sind keine Schrittmotoren. > Die errechneten Spitzengeschwindigkeiten aus meiner Simulation sind > relativ gering bei maximal 30 rpm. Das Drehmoment sollte stets unter 0.1 > Nm bleiben. Na dann mal los! > Denkt ihr das macht mein Motor und Treibermodul so mit? Vermutlich.
Ok danke! Also ich hatte in einem anderen Forum gelesen, dass schnellere Richtungswechsel ein Problem darstellen können und dies Motor bzw. Motortreiber auf Dauer zu sehr belasten. Bin mir halt nur unsicher, ab welcher Frequenz von Richtungswechseln es problematisch werden kann bzw. ob das bei meinen Drehmomenten und -geschwindigkeiten auch relevant ist.
Das hängt auch stark von deinem Regler ab, daher würde ich sagen: Ausprobieren. Siehst/Spürst ja dann, ob was übermäßig warm wird.
In der Aufgabenstellung ist ein Widerspruch. Spitzengeschwindigkeiten von 30 rpm sind ziemlich langsam und eigentlich nur mit Getriebemotoren zu erreichen. Die Masse des Getriebes und des Ankers machen wirklich schnelle Richtungsänderungen unmöglich. Wirklich schnelle Richtungsänderungen bekommt man nur mit eisenlosen Motoren (z.B. von Maxon), da hier nur die Masse der Wicklung selbst durch ihre Trägheit den Richtungswechsel bremst. Aber bei den Motoren redet man eher über Drehzahlen von bis zu 10000 rpm. In dem Bereich von 30 rpm halte ich Stepper für die beste Wahl, da diese im Prinzip nach jeden Schritt still stehen. So hat jeder Schritt wieder seine eigene Richtung und es gibt keinen Wechsel. Das stimmt natürlich nicht ganz, da auch die Stepper durch die mechanische Trägheit nicht zwischen den Positionen "springen", aber die Bewegung ist dennoch nicht kontinuierlich, sondern beschleunigt bei jedem Schritt und bremst vor dem nächsten wieder ab.Schwieriger ist die Software (oder auch Hardware), da man für diesen Betrieb für jeden Schritt immer aus jedem Ansteuermuster das nächste Muster abhängig von der gewünschten Drehrichtung berechnen und neu ausgeben muss. Dafür ist die Bewegung exakt bestimmbar. Ich habe vor vielen Jahren für Schreibmaschinen den Antrieb für die Bewegung des Kugelkopfes bzw. des Typenrades programmiert. Damit deren Bewegung schnell und exakt war, wurde ein Schrittmotor genommen und jeder Schritt neu per Programm ausgegeben.
Vor vielen Jahren hat ein Bekannter sowas aufgebaut, und als Antriebsmotor einen Handstarter für Modellmotoren ( Verbrenner ) benutzt. Der ist schnell und hat Kraft. Ist aber so groß wie eine Bierdose. Die Reglung ( Fuzzy Logic ) hat so gut funktioniert, dass auf dem Oszilloskop der Motorstrom nur noch ein schwaches Rauschen war. Bei einer Störung des Pendels ging dann natürlich die Post ab... War sehr beeindruckend.
Anno .. schrieb: > relativ häufig die Richtung wechselt frage ich mich, > ob dies mit meinem Motortreiber oder dem Motor selbst Probleme geben > könnte. Ich verstehe nicht, wieso deiner Meinung nach eine Richtungsänderung ein besonderes Problem sein soll. Beschleunigungen und Drehzahlen belastenden den Motor, aber ob sich dabei (bzw. nach Beschleunigungen) die Drehrichtung ändert, spielt überhaupt keine Rolle. Das sind rein analoge, kontinuierliche Vorgänge, auch um die Null herum. Habe ich etwas falsch verstanden?
Der Zahn der Zeit schrieb: > Das sind rein analoge, kontinuierliche Vorgänge, auch um die Null herum. > Habe ich etwas falsch verstanden? In einer Welt ohne Haftreibung und Umkehrspiel wäre das so. Ob die in dem speziellen Fall eine signifikante Rolle spielen, kann man aus unserer Position nicht vorhersagen.
Wäre das nicht was für BLDCs, die auch in Gimbals zur Kamerastabilisierung verwendet werden?
Ein Pendel hat doch nur einen geringen Ausschlag. Da würde sich doch die Kopfspule aus einer Harddisk anbieten.
Ja, oder man fixiert das Pendel einfach gleich in der Zielposition und spart sich den ganzen Antriebskram. Das ist doch ein uraltes Experiment, da gibts keinen Diskussionsbedarf mehr
Anno .. schrieb: > ich stehe vor der Wahl eines Motors für ein inverses Pendel, das ich > aufbauen möchte. Also, ich würde da einfach mal schauen, wie die vielen Anderen das die letzten Jahrzehnte so gemacht haben. Wie soll denn dein inverses Pendel aufgebaut sein? Sieht deines so viel anders aus als die, die tausende Studenten vor dir gebaut haben? Ich habe damals einfach eine komplette Servoachse und einen Linearantrieb genommen. Da ging es aber auch mehr um das Aufschaukeln des Pendels mit unterschiedlichen Pendelgeometrien und -gewichten. Anno .. schrieb: > Die errechneten Spitzengeschwindigkeiten aus meiner Simulation sind > relativ gering bei maximal 30 rpm. Und was wird mit diesen 30/min angetrieben? Das Pendel wird ja wohl nicht einfach an der Motorachse sein, denn sonst könnte man es ja einfach fix auf 12 Uhr positionieren.
:
Bearbeitet durch Moderator
Lothar M. schrieb: > Das Pendel wird ja wohl nicht einfach an der Motorachse sein, denn sonst > könnte man es ja einfach fix auf 12 Uhr positionieren. Ich fürchte genau da liegt der Hund begraben
Was spricht denn gegen einen Getriebemotor ? Bevorzugt einen mit Schneckengetriebe .. der ist sogar sicher bei Stromunterbruch. Jetzt aber weg...
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.