Guten Abend, ich verwende in einem Tamiya 1:10 Modell einen ATMEGA2560 auf Devboard. Der Mikrocontroller sorgt für die Steuerung div. LEDs. Es wird über externe Interrupt die Pulsweite aller Kanäle gemessen und entsprechend geschaltet (Servo PWM). Da das Devboard auch LDOs hat und sich seine 5V selber regelt, habe ich direkt den NiMH 7,2 V Akku angeschlossen. Leider habe ich Probleme mit den Störungen des Brushed Motors. Dieser versaut mir die Spannungsversorgung auf dem Devboard durch irgendwelche periodischen Spitzen wenn ich Gas gebe. Die äußert sich dadurch, dass LEDs an und aus gehen, obwohl sich die Pulsweite auf dem entsprechenden Kanal gar nicht geändert hat. Die Störungen messe ich leider auch hinter den LDOs. Ich habe eben eine klassische Elektromotorentstörrung mit 20 nF, 20 nF und 100 nF versucht. Leider hat das nichts gebracht. Mir ist noch etwas Komisches aufgefallen, wobei ich nichts weiß, ob das Zufall ist oder nicht. Ich hatte mit den Störungen, die schon immer da sind, bis letzte Woche keine Probleme. Erst seit dem ich die Schraubklemme auf dem PCB, an dem ich die Batteriekabel angeklemmt habe, verlegt habe, gibt es Probleme. Schraube ich Plus raus und bringe Plus mit einer Krokodilklemme direkt auf das PCB sind die Probleme wesentlich geringer/seltener. Keine Ahnung... Habt ihr eine Idee wie ich das ganze System entstören kann und die Akkuleitung sauber bekomme? Der Empfänger bekommt ja vom Fahrtenregler 5V. Die sind absolut sauber, egal wie viel Gas ich gebe. Vielen Dank!
:
Verschoben durch Moderator
Wahrscheinlich hast du ein Problem mit Spannungsabfall und Magnetfeldern auf der GND Leitung. Eventuell auch auf der positiven Versorgung. Zeige mal Fotos vom Aufbau, wo man den Verlauf der Leitungen sehen kann und mache dazu auch eine Skizze (nicht Schaltplan), die ungefähr den Verlauf der Leitungen und ihre Verbindungspunkte darstellt.
Der Motor wird evtl. direkt auf der RC Frequenz stören, dazu ist es gar nicht nötig, das er die Versorgung versproddelt. Die klassische Entstörung sind Drosseln in den Zuleitungen (dicht am Motor 47µH- 470µH)), einen Keramik-C über den Anschlüssen und zwei kleinere C von jedem Anschluss aufs Motorgehäuse. Evtl. Motorgehäuse auf Masse legen.
:
Bearbeitet durch User
Angehängte Dateien:
-

IMG_20200831_205353.jpg
220 KB -

IMG_20200831_205401.jpg
240 KB -

IMG_20200831_205412.jpg
240 KB -

IMG_20200831_205423_1.jpg
240 KB
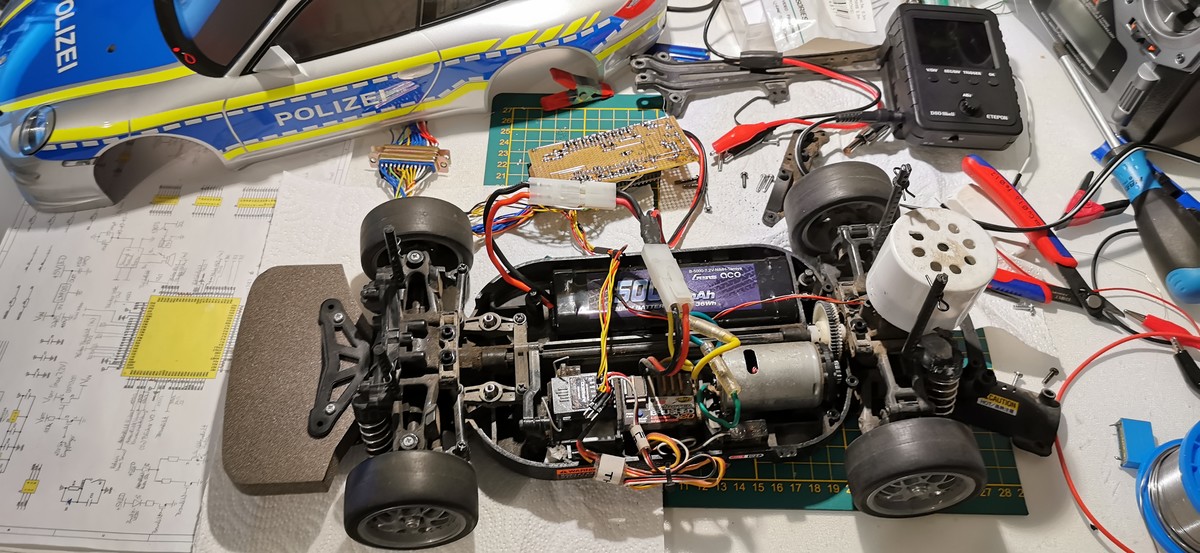
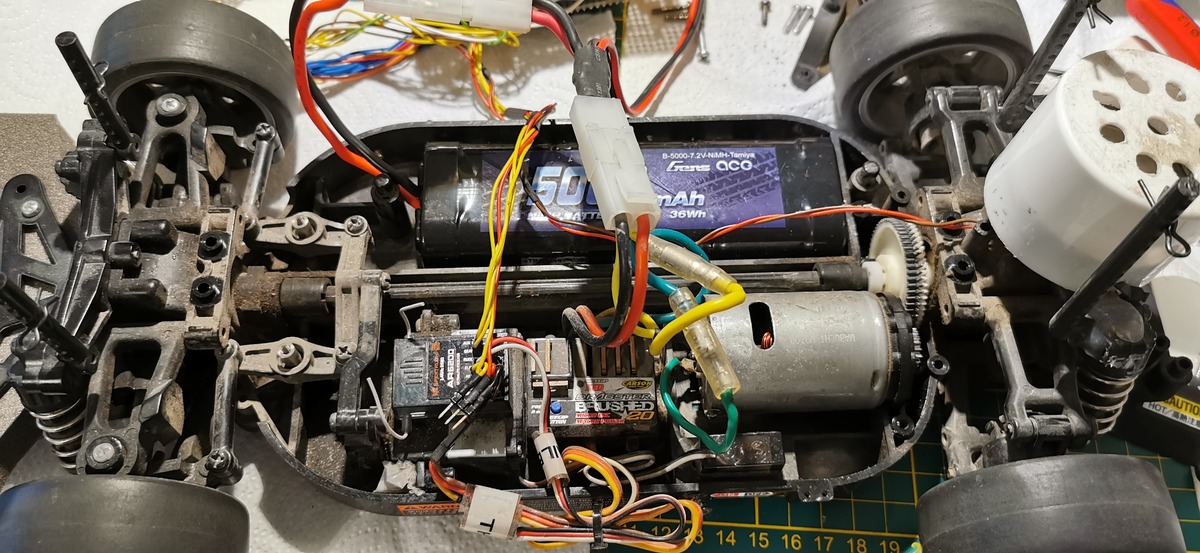
Stefan ⛄ F. schrieb: > Zeige mal Fotos vom Aufbau, wo man den Verlauf der Leitungen sehen kann > und mache dazu auch eine Skizze (nicht Schaltplan), die ungefähr den > Verlauf der Leitungen und ihre Verbindungspunkte darstellt. Mein Modell befindet sich noch im Aufbau, deswegen sind natürlich viele Leitungen noch nicht fest verlegt oder ähnliches. Auch hat mein uC noch keinen richtigen Platz auf dem Chassi. Im Anhang schon mal ein paar Bilder. Eine Skizze ist nicht wirklich aussagekräftig. Ich habe hat ein normales RC Modell mit Brushed Motor, Fahrtenregler und Empfänger. Der Mikrocontroller bekommt Spannung vom Motor und greift die PWM Signale (gelbe Leitungen) vom Empfänger ab. Darüberhinaus schalten die 5V vom Empfänger über MOSFET meinem Mikroctonroller die Spannung (Rote Leitung bei den gelben Leitungen). Matthias S. schrieb: > Die klassische Entstörung sind Drosseln in den Zuleitungen (dicht am > Motor 47µH- 470µH)) Schätze dass ich mir mal ein paar Spulen besorgen muss. Mit Caps alleine lässt sich das Problem jedenfalls nicht lösen.
Sefco schrieb: > Im Anhang schon mal ein paar Bilder. Das ist doch mal was für's Auge. Wenn ich gehässig wäre, würde ich jetzt sagen, daß du froh sein kannst, wenn das überhaupt fährt.
Der Empfänger muss natürlich viel weiter weg von dem dicken Motor und dem Regler. Ebenso muss die Antenne so weit entfernt sein von den Störern wie möglich. Verdrossele die Versorgung für jeden einzelnen Baustein und sorge für geordnete Masseverhältnisse. Es ist schlecht zu erkennen, was benutzt du denn für ein Frequenzband? Thomas E. schrieb: > daß du froh sein kannst, wenn das überhaupt fährt. Und wir können sicher froh sein, das das Ding kein Flugzeug ist :-P
:
Bearbeitet durch User
An den LDOs fehlen doch schon die erforderlichen 100nf Kondensatoren?!
Matthias S. schrieb: > Der Empfänger muss natürlich viel weiter weg von dem dicken Motor und > dem Regler. Ebenso muss die Antenne so weit entfernt sein von den > Störern wie möglich. Verdrossele die Versorgung für jeden einzelnen > Baustein und sorge für geordnete Masseverhältnisse. Es ist schlecht zu > erkennen, was benutzt du denn für ein Frequenzband? > > Thomas E. schrieb: >> daß du froh sein kannst, wenn das überhaupt fährt. > > Und wir können sicher froh sein, das das Ding kein Flugzeug ist :-P Habt ihr mein Problem verstanden? Ich habe kein Problem mit dem Empfänger. Das Modell fährt absolut 1a. Ich habe ein Problem mit Störungen an meinem Mikrocontroller. Außerdem ist jawohl eindeutig auf den Bildern zu erkennen das ich auf 2,4 GHz fahre (Antenne Empfänger). Die Komponenten sind alle da, wo sie jeder Modellbauer mit so einem Chassi hat. Tiroler schrieb: > An den LDOs fehlen doch schon die erforderlichen 100nf Kondensatoren?! Auf dem Devboard? Habe noch einen eigenen LDO der die LEDs versorgt.
Matthias S. schrieb: > Es ist schlecht zu erkennen, was benutzt du denn für ein Frequenzband? 2.4GHz Spektrum (Klon?). Hab auch solche Empfänger (optisch gleich!) und funktionieren gut obwohl AliExpress. Keine Störungen etc. - Aber nicht mit brushed Motoren...
Um das nochmal klarzustellen: Der Empfänger hat absolut saubere 5V und die PWMs haben auch keine Störungen. Meine Störungen koppeln auf der Batterieleitung ein. Da ist es auch egal wie ich das Batteriekabel lege, es muss nämlich in den Fahrtenregler.
Mein Senf schrieb: > Matthias S. schrieb: > Es ist schlecht zu erkennen, was benutzt du denn für ein Frequenzband? > > 2.4GHz Spektrum (Klon?). Hab auch solche Empfänger (optisch gleich!) und > funktionieren gut obwohl AliExpress. Keine Störungen etc. - Aber nicht > mit brushed Motoren... Original 2,4 GHz Spektrum Flugfernsteuerung.
Sefco schrieb: > Der Mikrocontroller bekommt Spannung vom Motor Ich hoffe mal das ist ein Schreibfehler. Wenn nein ist klar das der µC spinnt. Wenn du eigentlich Akku schreiben wolltest wäre es mal eine Versuch wert den µC Testweise mit einer eigenen Spannungsverorgung zu versehen (GND verbinden nicht vergessen:-). Wenn es damit geht weißt du schonmal das es die Versorgunsspannung ist. Wenn immer noch Probleme da sind streut irgendwas anderes ein. Viele Dev-Boards sind auch eher für eine saubere Laborumgebung ausgelegt und weniger für eine rauhe Umgebung mit vielen Störungen.
Irgend W. schrieb: > Sefco schrieb: >> Der Mikrocontroller bekommt Spannung vom Motor Ja sorry, ich meinte Akku. Ich versuche es mit Induktivitäten wie oben beschrieben und melde mich dann nochmal.
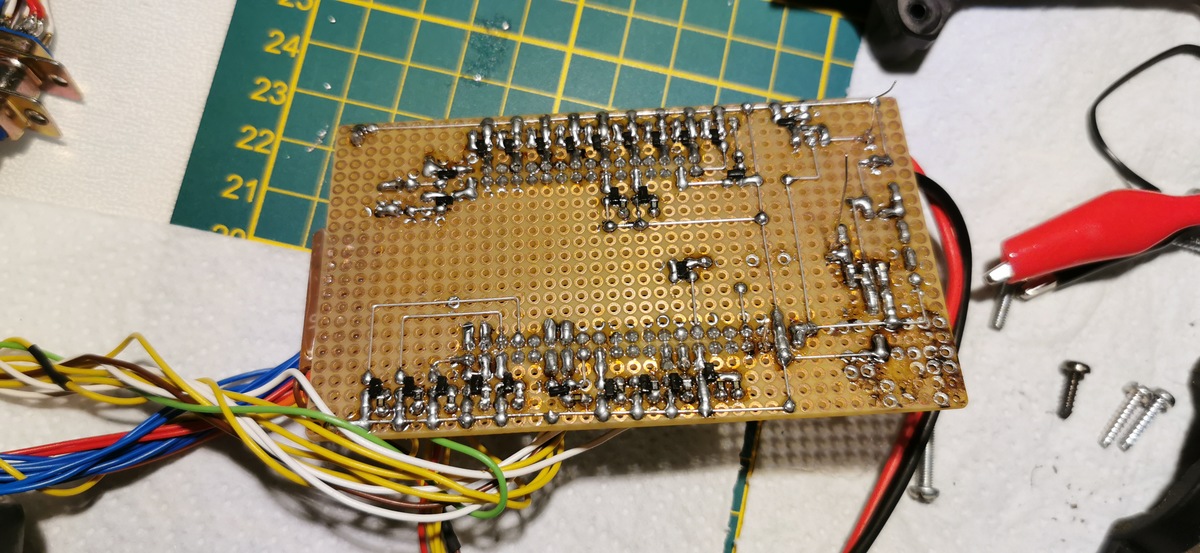
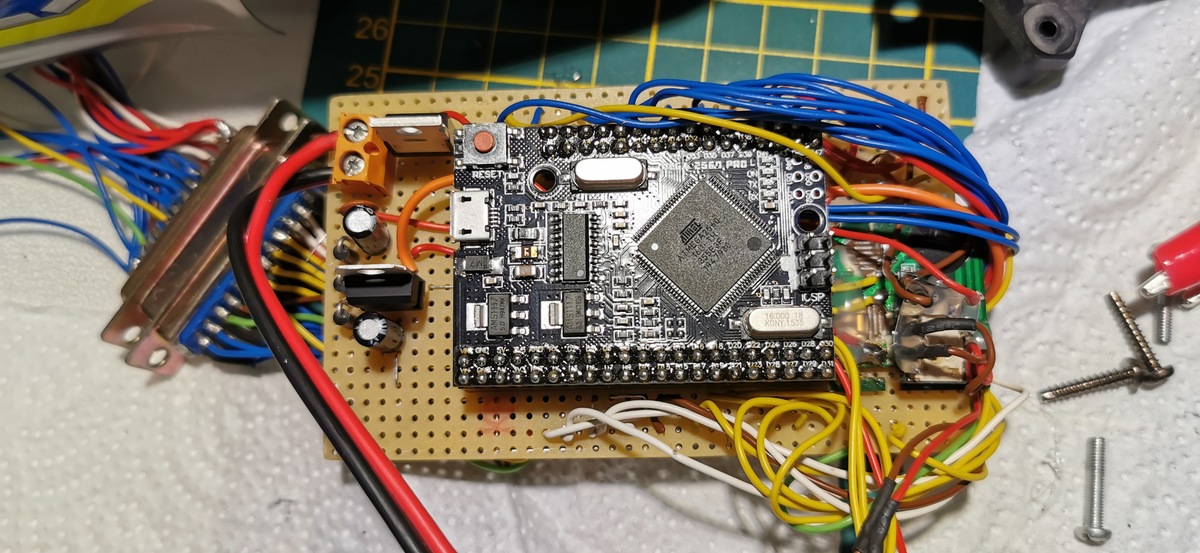
Den LDOs fehlen die keramischen Abblockkondensatoren direkt an den Pins, siehe Datenblatt. Die Masse- und Plus-Verbindung zum Dev-Board muss kurz und "dick" sein. Die Masse-Verbindung zwischen dem LDO für die LEDs und dem LDO für das Dev-Board ebenfalls kurz und "dick". Am Eingang der LDOs kannst Du noch eine Schutzschaltung anbringen, wie sie für Kfz empfohlen wird. Schaltet der Mikrocontroller die LEDs direkt oder über einen Treiber? Blackbird Edit: Ich sehe SMD-Transistoren auf der Leiterseite und teilweise auch SMD-Widerstände für die LEDs, aber keine Basisvorwiderstände. Ist das so? Kannst Du mal einen Schaltplan posten?
:
Bearbeitet durch User
Das LED Board funktioniert aber einwandfrei wenn du das Modell nicht bewegst? Es muss nämlich nicht zwingend am Motor liegen! ich würde direkt über den Empfänger die Spannung abgreifen und hinter die LDOs legen. Wichtig wäre zu wissen ob das Board ohne Motor funktioniert. Wenn es da auch zu Störungen kommt dann liegt es an der Software bzw. den Impulsen.
Lothar J. schrieb: > Den LDOs fehlen die keramischen Abblockkondensatoren direkt an den Pins, > siehe Datenblatt. Siehe Datenblatt im Anhang. Angeblich sind dort ausreichend Abblockkondensatoren. Lothar J. schrieb: > Die Masse- und Plus-Verbindung zum Dev-Board muss kurz und "dick" sein. > Die Masse-Verbindung zwischen dem LDO für die LEDs und dem LDO für das > Dev-Board ebenfalls kurz und "dick". Ich werde die Leitungen mal kürzen. Kannst du mir erklären wieso sie kurz sein sollen? Wenn direkt am Fahrtenregler Störungen einkoppelt ist es meiner Meinung nach auch egal, wie lang die gestörte Leitung dann ist. Lothar J. schrieb: > Schaltet der Mikrocontroller die LEDs direkt oder über einen Treiber? Jede LED wird über einen N-MOSFET getrieben, sprich keine Widerstände am Gate. Ich schrieb: > Das LED Board funktioniert aber einwandfrei wenn du das Modell nicht > bewegst? > Es muss nämlich nicht zwingend am Motor liegen! Funktioniert wenn ich kein Gas gebe. Wenn ich Gas gebe gibt es Störungen auf Plus gegen Ground gemessen. Ich schrieb: > ich würde direkt über den Empfänger die Spannung abgreifen und hinter > die LDOs legen. > Wichtig wäre zu wissen ob das Board ohne Motor funktioniert. Wenn es da > auch zu Störungen kommt dann liegt es an der Software bzw. den Impulsen. Eine sehr gute Idee, wie ich ja sagte sind die 5 V vom Empfänger sauber. Könnte den uC dann direkt darüber speisen. Das probiere ich direkt aus, wenn die Entstörmaßnahmen mit den Spulen nichts bringen (besorge mir gleich welche). Die LEDs speise ich dann weiterhin per Batterie und LDO.
Sefco schrieb: > Habt ihr mein Problem verstanden? Dein Problem ist dass du nicht mal einen Schalt und Verdrahtungsplan hast. Bevor du was zusammenstöpselst: Mach einen Verdrahtungsplan! Bevor du was zusammenlötest: Mach einen Schaltplan! Nicht irgendein Plan im Netz, der dann doch irgendwie anders ist. DEINEN Plan, so wie es bei DIR aussieht. Und jede Abweichung zum Plan: Ändere den Plan. Und diesen Schalt und Verdrahtungsplan stellst du hier rein. Bitte Bildformate beachten. Dann kann man dir helfen. p.s. Um einen Schalt und eine Vedrahtungsplan zu machen braucht man nicht unbedingt Software. Karopapier Lineal und Bleistift reichen völlig.
Sefco schrieb: > Eine sehr gute Idee, wie ich ja sagte sind die 5 V vom Empfänger sauber. Das ist das Erste. Das Zweite ist ein Sternpunkt an dem alle Massen verbunden sind. Wichtig: Sternförmige Verteilung der Massen! Keine Masseschleifen.
Sefco schrieb: > Eine sehr gute Idee, wie ich ja sagte sind die 5 V vom Empfänger sauber. > Könnte den uC dann direkt darüber speisen. Das probiere ich direkt aus, > wenn die Entstörmaßnahmen mit den Spulen nichts bringen (besorge mir > gleich welche). Die LEDs speise ich dann weiterhin per Batterie und LDO. Ich glaube das würde das Problem schon lösen, denn die "Störungen" sind vermutlich nur Spannungsabfälle. Ich würde auch die LEDs direkt aus dem Empfänger versorgen, somit sparst du dir dann den 2. LDO
Angehängte Dateien:
-

Schaltplan.jpg
460 KB
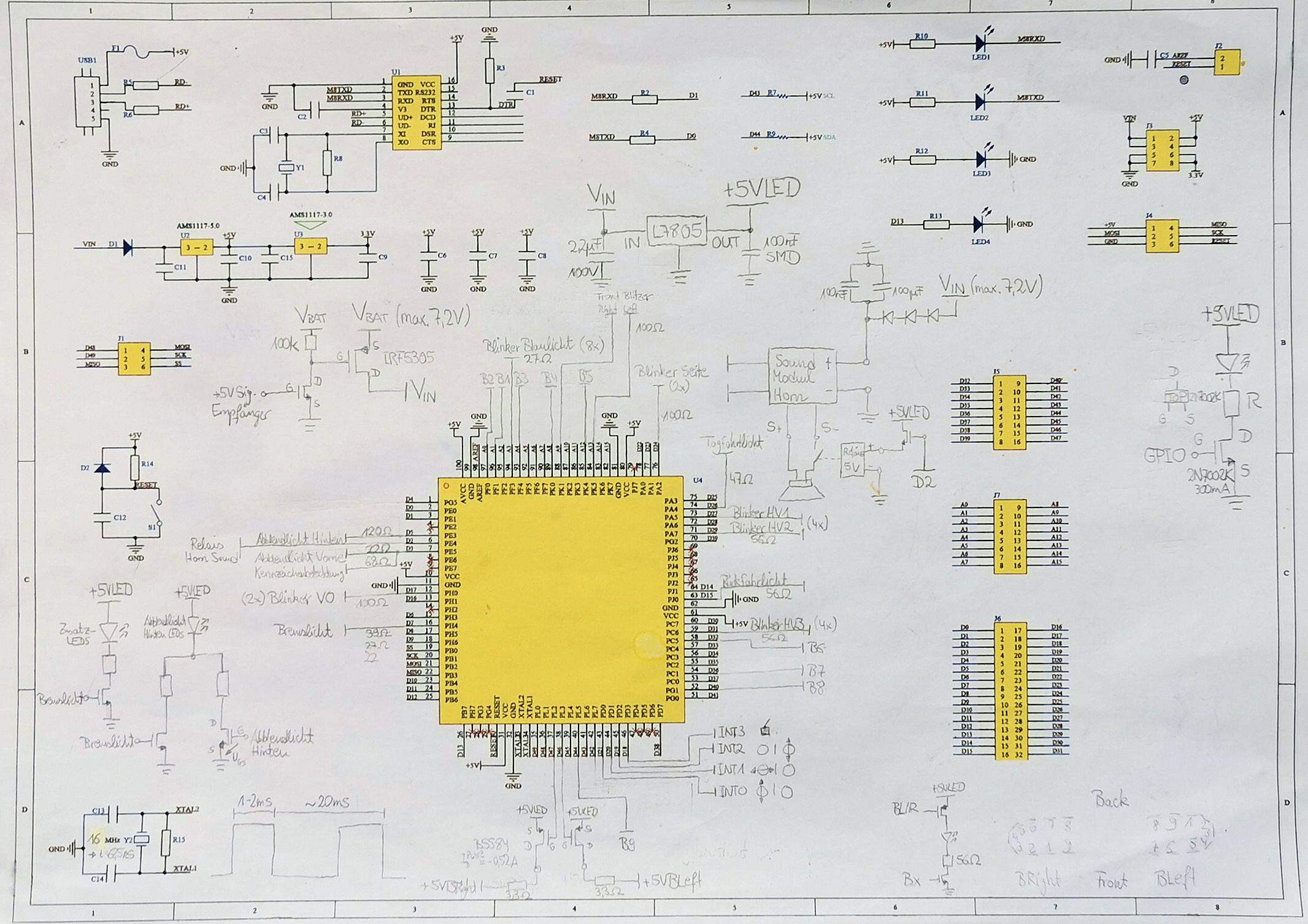
Udo S. schrieb: > Dein Problem ist dass du nicht mal einen Schalt und Verdrahtungsplan > hast. Schaltplan habe ich, siehe Anhang. Einen Verdrahtungsplan brauche ich nicht wenn ich 4 PWMs und Spannung von der Batterie abgreife. Jede LED wird per N-MOSFET + LED-Vorwiderstand geschaltet. Udo S. schrieb: > Das ist das Erste. > Das Zweite ist ein Sternpunkt an dem alle Massen verbunden sind. > Wichtig: Sternförmige Verteilung der Massen! Keine Masseschleifen. Werde ich probieren! =) Ich schrieb: > Ich würde auch die LEDs direkt aus dem Empfänger versorgen, somit sparst > du dir dann den 2. LDO Ich habe sau viele LEDs entsprechend eines richtigen Polizei-Autos g Will den Empfänger nicht überlasten...
Sefco schrieb: > Die Störungen messe ich leider auch hinter den LDOs. Was genau misst du denn hinter den LDOs? Müssten ja weniger als 5 Volt dann sein. Und vor den LDOs? Du sagt immer, du misst Störungen aber sage doch bitte mal welche Spannung du misst! Denn wie gesagt, ich glaube nicht, dass es "Störungen" sind. Und dein Empfänger würde das schon aushalten mit den ganzen LEDs. Immerhin kommen an so einen Empfänger auch Servos
Sefco schrieb: > Mein Modell Mmmh, nice. Flugzeugempfänger, Nickelakku, Tamiya-Feuerstecker, Carson-Schrott-ESC. Super gelöst. ;) Sefco schrieb: > Will den Empfänger nicht überlasten... Den Empfänger überlastest du nicht, der verträgt schon einige Ampere aus einem vernünftigen BEC. Dein Spielzeug-ESC dürfte die Schwachstelle sein, wenn der schon nur 5V abgibt. Da kommt dann auch nur 1A raus, und das Lenkservo braucht 2, der Rest ist dann für den Empfänger und das Licht ;) Nimm mal einen guten Akku, der den Strom auch liefern kann, dann ein vernünftiger ESC mit einem guten BEC für 3A oder mehr, und schmeiß die Drecksstecker weg, XT60 oder so muss das sein, und keine Adapteritis: Das Auto hat komplett einen Stecker, und der Akku auch. Das wird schon viele deiner Probleme lösen, wette ich. Zumindest an meinen Autos mit 6V 3A Hobbywing 1080-ESC und 2S Lipo mit XT60 klappt auch viel Licht völlig störungsfrei. Auch wenn ich zugegeben keinen 2560 dazu brauche, ein OSL mit 328P reicht auch. Wer hat dir die Software geschrieben?
Oder dass es ein mechanisches Problem ist, ein Wackelkontakt? Das Controllerboard könnte gesteckt sein, ist aber nicht zu erkennen. Oder es hat schon einen Schuss/Mikroriss etc. Wenn die LEDs falsch leuchten heißt das doch, dass der Mikrocontroller aus dem Tritt kommt, bzw. seine Portregister Werte verlieren. So wie ich das aus dem Schaltplan sehe gibt es keine nachgelagerten Speicherglieder mehr, die umschalten könnten.
Der Schaltplan: Die LDOs !müssen! so wie im Datenblatt angegeben, beschaltet werden (die Werte für Elkos und Kerkos einhalten) und !alle! Masseverbindungen sollen reichlich Querschnitt haben. Außerdem sollten alle in einem Sternpunkt oder einer großen Fläche enden/beginnen. RESET vom Mikrocontroller ist nicht beschaltet. Der Mikrocontroller hat keine Abblockkondensatoren, jedenfalls in Deinem Schaltbild keine. Ich hoffe doch, dass er auf dem Developmentboard welche hat. Dann brauchst Du auch nicht die Empfängerstromversorgung belasten und kannst die LDOs benutzen. Welche sind es denn? Du hast ein Masseproblem und eine ungeschützte Versorgungsspannung, das ist meine Meinung an Hand der Bilder und Deinen Schilderungen. Blackbird
Jens M. schrieb: > Mmmh, nice. > Flugzeugempfänger, Nickelakku, Tamiya-Feuerstecker, Carson-Schrott-ESC. > Super gelöst. ;) So gelöst, wie bei 99% aller Modellbauer. Was soll an einer Flugfernsteuerung schlecht sein? Ich brauchte viele Kanäle. Was soll an einem Nickelakku schlecht sein? Ich fahre hier Brushed und benötige keine Mega-Ströme aus dem Akku wobei wir zur Frage kommen, wieso die Tamiya Stecker so schlecht sein sollen. Jens M. schrieb: > Wer hat dir die Software geschrieben? Schade dass ich hier so inkompetent wirke, dass du fragst wer die Software geschrieben hat. Ich habe sie geschrieben. Lothar J. schrieb: > RESET vom Mikrocontroller ist nicht beschaltet. > Der Mikrocontroller hat keine Abblockkondensatoren, jedenfalls in Deinem > Schaltbild keine. Ich hoffe doch, dass er auf dem Developmentboard > welche hat. Alles auf dem Devboard.
Hast du mal gemessen was am Devboard ankommt beim Gasgeben? Und was meinst du mit Störungen hinter den LDOs? Kann es ein Softwarefehler sein? Neutralstellung der Knüppel beim einschalten merken aber erst nachdem der Empfänger fertig initialisiert hat... Steck den Brushedregler mal an einen anderen Kanal, etc. etc.
Hi, so ein brushed Motor verursacht ungemein viele Störungen. Versuch die Versorgung zum µC mit Kondensatoren, Drosseln usw. zu filtern. Ev. ist auch eine gute Pufferung notwendig. Den µC und dessen Leitungen so weit wie möglich weg vom Motor. Zum Testen das Auto aufstellen, so dass die Reifen frei sind, und so tun als ob man fährt. Mal wenig, mal viel Gas... Lenken usw. Gruß.
Sefco schrieb: > Lothar J. schrieb: >> RESET vom Mikrocontroller ist nicht beschaltet. >> Der Mikrocontroller hat keine Abblockkondensatoren, jedenfalls in Deinem >> Schaltbild keine. Ich hoffe doch, dass er auf dem Developmentboard >> welche hat. > > Alles auf dem Devboard. Gut. Den Rest meines Beitrags hast Du auch gelesen? Blackbird
Dir streut das Kollektorfeuer in den MC. Hast Du an den beiden Spannungsreglern auch bei Ein- und Ausgang Kondensatoren?
Philipp G. schrieb: > Dir streut das Kollektorfeuer in den MC. Hast Du an den beiden > Spannungsreglern auch bei Ein- und Ausgang Kondensatoren? Hat er, aber für den Anwendungsfall zu klein und gegen HF-Einstreuungen hilft ein Tantal wenig. Wenn es denn überhaupt welche sind, ich sehe hier nur Elkos mit normalen ESR. Da sollten noch ein paar Kerkos dran, die die Einstreuungen auf die (ellenlangen ungeschirmten) Versorgungsleitungen gegen eine niederohmige, induktivitätsarme Masse kurzschließen können. Hier hilft kein "audiophiler" Voodoo-Zauber und kein planloses Probieren. Bei stehendem Motor funktioniert es doch. Blackbird
:
Bearbeitet durch User
Angehängte Dateien:
-

Stoerungen.jpg
210 KB
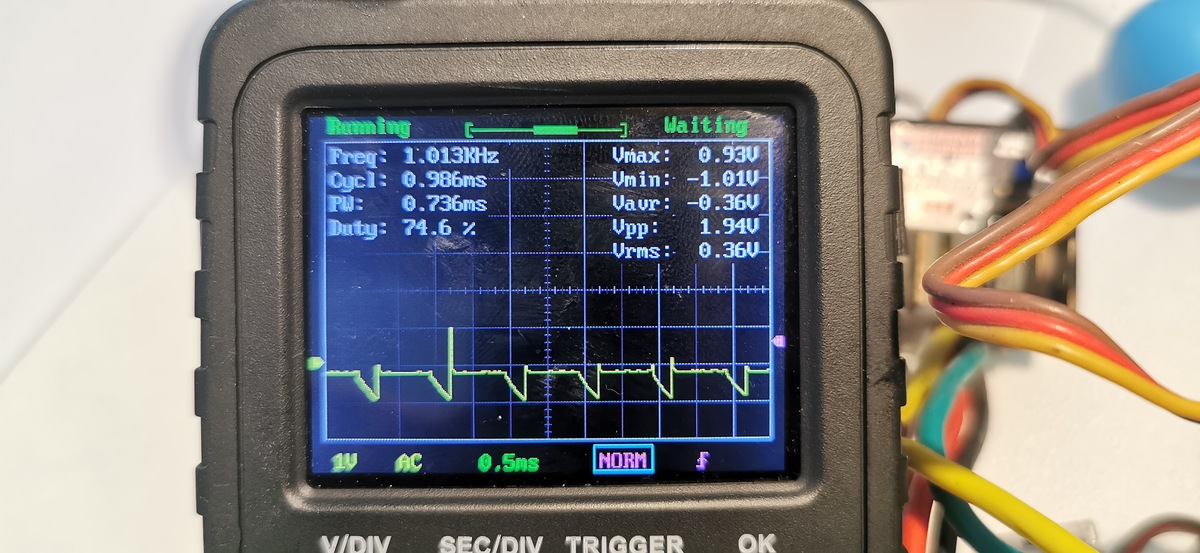
Im Anhang mal die Störungen wenn ich Gas gebe auf der Batterieleitung. Was richtig blöd ist: Entstörung mit 2x 10 nF und 1x 47 nF mit und ohne Masse des Motorgehäuses bringt überhaupt garnichts. Was hilft sind Spulen (57 uH) in den Motorzuleitungen, allerdings kommt mein Motor dann nicht aus dem Saft und die werden heißt weil ich nur welche mit dünnem Draht bekommen habe. Wenn mein uC die Störungen im Anhang auf die Versorgungsspannung bekommt, muss man sich eigentlich nicht wundern wenn meine Externen Interrupts verrückt spielen. Ich glaube ich lasse die ganze Entstörerei und speise den uC wie hier schon vorgeschlagen wurde aus dem Empfänger. Trotzdem wüßte ich gerne, wie der Fahrtenregler saubere 5V an den Empfänger geben kann, wenn bei mir selbst nach einem LDO die Störungen noch da sind. Wie machen die das?
Sefco schrieb: > Im Anhang mal die Störungen wenn ich Gas gebe auf der Batterieleitung. Die Messung ist nicht aussagekräftig solange man nicht weiss wo du dein oszi an Masse klemmst. Messe als erstes mal mit Oszimasse direkt am Akku und dann den Tastkopf am µC Massepin. Da sollte idelaerweise eine Linie rauskommen.
Sefco schrieb: > Was hilft sind Spulen (57 uH) in den Motorzuleitungen, allerdings kommt > mein Motor dann nicht aus dem Saft und die werden heißt weil ich nur > welche mit dünnem Draht bekommen habe. Du solltest schon Entstördrosseln nehmen die zu dem Motor passen.
Du kannst ja die LEDs selbst aus der Batterie bzw. über deinen Linearregler betreiben, die sind ja sowieso extern getrieben. Dann musst du dir weniger Sorgen um überlast oder zusätzlich eingekoppelte Störungen in den Empfänger machen.
Angehängte Dateien:
-

Motor_Entstoe_.jpg
81 KB
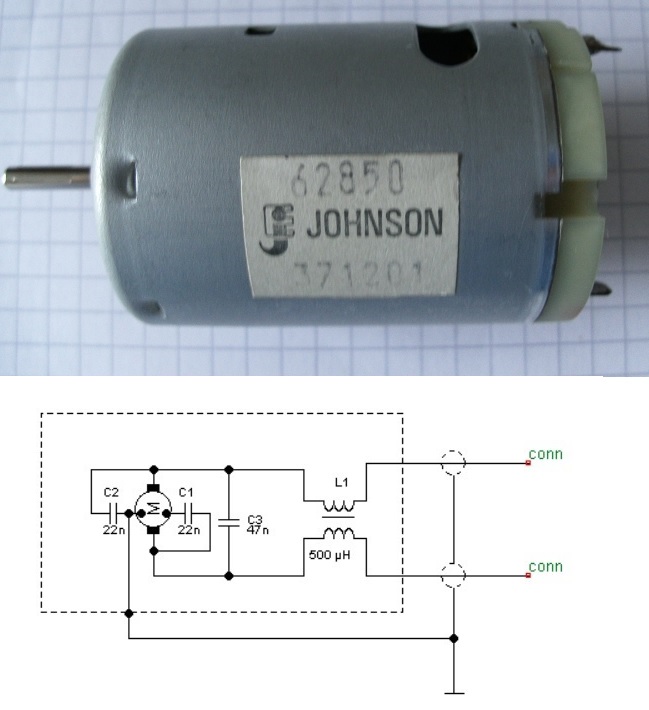
Hi, Motörchen im Bild knattert nicht mehr im Kurzwellenradio, wenn er so beschaltet wird. Wenn Du mit PWM arbeitest, hast Du allerdings eine Obergrenze für die Kondensatoren zu beachten, damit PWM auch noch funktioniert. Sonst hätte ich 1µF aufwärts reingeschrieben. Ringkerndrossel, Kondensatoren direkt am Motorgehäuse. Dann Zuleitung zweiadrig und abgeschirmt. "Erdung" des Schirms am Zentral-"Masse"-Punkt ciao gustav
Mach mal eine vernünftige Eingangsbeschaltung. Eine 1A Sicherung flink und eine 47mH Spule in Serie, dahinter eine 1N4001 antiparallel und einen 220uF low ESR plus 100nF Kerko parallel VOR den Spannungsreglern. Dahinter kannst du den beiden auch noch je zwei 100nF Kerkos spendieren, möglichst nah zum Ausgang.
:
Bearbeitet durch User
Sefco schrieb: > Was soll an einer > Flugfernsteuerung schlecht sein? Der Empfänger braucht Luft, die Erde ist zu nah, die Reichweite nimmt ab und die Störungen nehmen zu. Sefco schrieb: > Was soll an > einem Nickelakku schlecht sein? Wenig Pulsbelastbarkeit. Das du ein Problem mit dem Strom hast, steht ja wohl außer Frage. Sefco schrieb: > Ich fahre hier Brushed und benötige > keine Mega-Ströme aus dem Akku wobei wir zur Frage kommen, wieso die > Tamiya Stecker so schlecht sein sollen. Weil die einfach Scheiße sind, umgebogenes Blech. 3x gesteckt und die Kraft ist futsch, damit geht der Widerstand hoch. Wie lange hält bei dir der Akku? Daraus kannst du den durchschnittlichen Strom rechnen, im Drifter wird das schon ordentlich sein. Spitze ist 10x so viel. Und du hast den gefrickelten Adapter davor, der es nicht besser macht. Sefco schrieb: > Schade dass ich hier so inkompetent wirke, dass du fragst wer die > Software geschrieben hat. Ich habe sie geschrieben. Programmierer, aber nicht wirklich Plan von der Hardware, das kam mir komisch vor. Normal ist beides gleich, weil ein gutes HW-Design die Software einfacher macht. In der Software ist jedenfalls viel Potential, den Fehler auszubügeln, z.B. durch Glättung und entsprechendes Portschreiben. Schorschi schrieb: > Versuch die Versorgung zum µC mit Kondensatoren, Drosseln usw. zu > filtern. > Ev. ist auch eine gute Pufferung notwendig. > Den µC und dessen Leitungen so weit wie möglich weg vom Motor. So viele Arduino Nanos und andere Module, die direkt am Empfänger vor den Motor geschnallt sind und anstandslos funktionieren, kannst du gar nicht zählen. Motorstörungen sind mit Sicherheit vorhanden, aber andere Drosselfreie Schaltungen kommen da auch mit klar. Meist wird der Prozessor mit einer oder zwei Dioden an die 6V des Servosteckers geflanscht, 100n an jedem VCC-Pin und das war's. Warum funzt das? Sefco schrieb: > Im Anhang mal die Störungen wenn ich Gas gebe auf der Batterieleitung. 1kHz. Das ist die PWM des ESC, du hast ein Problem mit dem Motor (Kollektorkurzschluss, Wicklungsschluss o.ä.) oder eine der Motorbrücken im ESC spackt ab (Wasserschaden, Hitzeschaden, Kurzschlussspätfolgen). Oder einfach Spannungseinbrüche, weil Akku und Zuleitung mit Steckern zu hochohmig ist. Karl B. schrieb: > Motörchen im Bild knattert nicht mehr im Kurzwellenradio, wenn er > so beschaltet wird. > Wenn Du mit PWM arbeitest, hast Du allerdings eine Obergrenze für die > Kondensatoren zu beachten, damit PWM auch noch funktioniert. Im Modellbau ist 3x 47n oder 100n Standard (wenn überhaupt), und er fährt mit 1kHz PWM, da sollte sogar noch mehr gehen. Interessehalber: was würdest du für 16kHz PWM empfehlen?
Sefco schrieb: > Eine Skizze ist nicht wirklich aussagekräftig. Nur anhand der Fotos (die durchaus hilfreich sind) kann ich leider nicht erkennen, wo genau jetzt welche Stromversorgungsleitung endet. Offenbar hast du den Mikrocontroller möglichst nahe am Akku angeschlossen, während aber die Empfänger der Signale ihr Stromversorgung vom ESC bekommen. Die dicken Leitungen vom Akku zum ESP "leiden" unter Spannungsabfall, wenn der Antriebsmotor läuft, so dass dort das GND Potential deutlich höher als 0V (verglichen mit dem Mikrocontroller) sein wird. Das ist ein Problem. Deswegen schließe lieber alle Elektronik Komponenten an den Ausgang des ESC an. Der ESC sollte der Sternpunkt für alle GND Leitungen sein. Dann ist Spannungsabfall an den Leitungen zum Akku und zum Motor völlig egal*. *) sofern nicht zu hoch. Der ESC braucht etwa 6 Volt um ordnungsgemäß zu funktionieren. Wenn die Spannung am Eingang des ESC darunter fällt, hast du zu viel Spannungsabfall an den Zuleitungen oder der Akku ist zu schwach. Sefco schrieb: > Einen Verdrahtungsplan brauche ich nicht Mit dieser Einstellung hast du schon verloren. Kein Plan -> Keine Hilfe
Guten Abend, ich fasse nochmal zusammen: Mit einem ATMEGA2560 (aufgrund der gehobenen Anzahl an Timern & GPIOs) greife ich alle PWM Kanäle des Empfängers ab und schalte div. LEDs (Abblendlicht, Bremslicht, Rückfahrtlicht, Blaulicht sowie Blinker). Die PWM Kanäle werden per externen Interrupt + Timer gemessen und entsprechend geschaltet. Mein uC Programm funktioniert einwandfrei. Der uC und alle LEDs werden direkt aus der Batterieleitung vor dem Fahrtenregler gespeist und die Spannungen per LDO gewandelt. Wenn ich Gas gebe und mein brushed Motor läuft, schaltet sich wild Blinker, Blaulicht und Co an und aus. Messungen mit meinem billigen China Oszi haben 1 kHz auf der Batterieleitung ergeben. Leider sind die Messungen nicht sehr zuverlässig und weitere Untersuchungen mit dem Oszi nicht hilfreich, weil das Ding nicht mal die Batteriespannung korrekt misst (Zeigt 6,5 V an während mein Multimeter 7,5 V anzeigt. Der Empfänger hingegen hat saubere Spannung auf allen BEC Buchsen, egal was der Motor macht. Lösungsvorschläge hier im Thread: - Motor entstören mit Kondensatoren und Spulen -> Kondensatoren helfen überhaupt nicht gegen die PWM -> Serielle Spulen haben die Störungen reduziert, jedoch konnte ich mir bisher keine geeignete Spule besorgen und würde auch aufgrund von potentiellen Spannungsspitzen ungern mit Spulen zu arbeiten - Masseschleifen wurden aufgelöst und die Masse Sternförmig vom Fahrtenregler weggeführt -> Hilft überhaupt nicht - Testweise wurde der uC räumlich vom Motor so weit es ging getrennt -> Hilft überhaupt nicht - Den uC direkt aus dem Empfänger speisen -> Hilft sofort - danke für den Hinweis! - Was habe ich daraus gelernt: -> Finger weg von der Batterieleitung bei RC Cars (zumindest mit Brushed Motoren) in Kombination mit Digitaltechnik solange ich nicht in der Lage bin eine vernünftige Eingangsbeschaltung zu dimensionieren, die eine saubere Betriebspannung aus der Batterieleitung generiert. Schönen Dank für die Anregungen!
Sefco schrieb: > - Den uC direkt aus dem Empfänger speisen > -> Hilft sofort - danke für den Hinweis! Hmm, das überrascht mich schon. Ich hätte erwartet, dass der Spannungsregler auf deinem µC Board für eine glatte Versorgungsspannung sorgt.
Also ich fahre auch Brushed, allerdings mit 2S Lipos und habe Standardbeschaltung, also nur Kondensatoren - aber keine extra Drossel am Motor. Ebenso die billigen Orange DSM2 Receiver und ein bissel Arduino Nano mit Licht. Obendrauf 5,8GHz Cam. Was soll ich sagen: Läuft. Der Unterschied: Hab ein Drossel und eine Kombi aus Kondensatoren - vor dem BEC. Nachtrag: https://fpv-team.de/lc-filter-gegen-streifen-im-videobild/
:
Bearbeitet durch User
Stefan ⛄ F. schrieb: > Hmm, das überrascht mich schon. Ich hätte erwartet, dass der > Spannungsregler auf deinem µC Board für eine glatte Versorgungsspannung > sorgt. Mich ehrlich gesagt auch. Vermutlich kann man dem Phänomen nur auf die Schliche kommen, indem man mit einem besseren Oszi diese Störungen untersucht.
hast du überhaupt keine Entstörmaßnahmen an den ADC-Eingängen? Zu mindestens kleine RC Filter wäre hier angesagt. Dem Spannungsregler auf deiner Platine könntest du mal jeweils einen 100nF Kerko am Ein- u. Ausgang gegen Masse spendieren und den Eingangselko mal etwas vergrößern nimm ruhig >500µF evtl. mit einer Diode davor nicht das der Motor der Elko leernuckelt. Vielleicht kannst du nochmal ein Foto wie Bild Nr.4 machen allerdings die Kamera so drehen das man nicht die Reflektion sieht und vor die externe Lampe ein Blatt Papier vorhalten, dann hat man ein weiches Licht und eine gleichmäßige Ausleuchtung. Wenn dann deine Kamera/ dein Handy einen Makromodus hat (meist ein Blumensymbol) wäre es perfekt. Hast du irgendwelche Schlachplatinen z.B. alten Analogreceiver, defektes Netzteil......? Schau mal ob du soetwas darauf findest das könntest du deinem Spannungsregler vor dem Eingangselko in Reihe spendieren. https://www.reichelt.de/fest-induktivitaeten-radial-c3180.html?&nbc=1 Diese Freiluftverdrahtung mit dem stromführenden Kabeln die auf den Sensorleitungen liegen ist auch nicht gerade ideal.
Ich hatte ja gefragt welche Spannung du misst bzw. was das Oszi sagt auf der Akkuseite wenn du beschleunigst? Wie gesagt, ich würde die LDOs runterschmeißen, direkt ans BEC gehen, Diode noch auf die Versorgungsschiene, dann hast du deine Spannung für das Lichtmodul. Noch mehr Kondis und Drosseln am Motor bringt meiner Meinung nichts und hat ja auch nichts gebracht.
Jedes Kabel was an dein Devboard geht ist eine Antenne, die Störungen deines Motors empfängt.
Wenn man die Störquelle nicht ruhig bekommst muss man eben seine Schaltung so härten das Sie nicht aus dem Tritt kommt. Deswegen habe ich dir die Vorschläge für deine Platine gemacht. Bei mir laufen die uC neben einer 5cm Funkenstrecke direkt neben einer Kfz Zündspule stabil. Eine Kamera hingegen hats geschrottet.
Sefco schrieb: > - Masseschleifen wurden aufgelöst und die Masse Sternförmig vom > Fahrtenregler weggeführt > -> Hilft überhaupt nicht Nein, hast Du nicht gemacht. Der (sternförmige) Massepunkt der Steuersignale ist der Masseanschluß am Empfänger. Und wo sind die Massen Deiner Mikrocontrollerplatine angeschlossen? Stefan ⛄ F. schrieb: > Offenbar hast du den Mikrocontroller möglichst nahe am Akku > angeschlossen, während aber die Empfänger der Signale ihr > Stromversorgung vom ESC bekommen. Die dicken Leitungen vom Akku zum ESP > "leiden" unter Spannungsabfall, wenn der Antriebsmotor läuft, so dass > dort das GND Potential deutlich höher als 0V (verglichen mit dem > Mikrocontroller) sein wird. Das ist ein Problem. > > Deswegen schließe lieber alle Elektronik Komponenten an den Ausgang des > ESC an. Der ESC sollte der Sternpunkt für alle GND Leitungen sein. Dann > ist Spannungsabfall an den Leitungen zum Akku und zum Motor völlig > egal*. Lies Dir das hier noch mal genau durch. Kleiner Tipp: Es geht um die Masseleitungen, nicht um die Versorgungsspannung. Lothar J. schrieb: > Du hast ein Masseproblem und eine ungeschützte Versorgungsspannung, das > ist meine Meinung an Hand der Bilder und Deinen Schilderungen Mach endlich mal einen Verdrahtungsplan. Der ist für Dich, damit Du erkennst, wo Spannungen abfallen und wo nicht. Nochmal: Das ist kein ominösen Voodoo-Zauber, den man hilflos ausgeliefert ist, das ist schnöde, simple Elektrik. Blackbird
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.