Hallo,
Wie man aus dem Betreff schon erahnen kann ist die Grundfrage meines
Posts: Können Registeroperationen, also ein Register lesen oder
schreiben, Interrupts blockieren?
Damit ihr einen Überblick bekommt warum sich diese Frage für mich
stellt, muss ich etwas ausholen und stelle kurz mein Projekt vor.
Ziel des Projekts ist es einen MPP-Tracker auf einem ATTiny404 zu
implementieren. Dieser wurde ausgewählt, weil er unschlagbar günstig ist
( ~0,41€ /Stück) und dabei uns trotzdem eine Schaltfrequenz von 80kHz
für die PWM zur verfügung stellt.
Die Schaltung die verwendet wird ist ein Inverswandler
(https://de.wikipedia.org/wiki/Inverswandler).
Ein großer Nachteil den dieser Chip hat, ist das er nicht dafür geeignet
ist Halbbrücken anzusteuern. Der Grund ist, dass man keine Totzeit
einstellen kann.
Um dieses Problem zu umgehen, kam die Idee auf das ganze mit zwei
Interrupts zu lösen und sich quasi einen eigenen PWM-Generator zu
basteln. Dazu wird ein Overflow-Interrupt und ein Compare-Interrupt
verwendet.
Hier einmal der Code für den Overflow Interrupt_
1 | ISR(TCA0_OVF_vect)
| 2 | {
| 3 | /* Insert your TCA overflow interrupt handling code */
| 4 |
| 5 | if(enable){
| 6 | //Untere Halbbruecke wird Ausgeschaltet
| 7 | LI_set_level(false);
| 8 |
| 9 | //Totzeit bis die obere Halbbruecke eingeschaltet wird
| 10 | //Assemblerbefehler der dafür sorgt das für 1 Zyklus nichts gemacht wird
| 11 | asm("nop");
| 12 | asm("nop");
| 13 |
| 14 | //Obere Halbbruecke wird eingeschaltet
| 15 | HI_set_level(true);
| 16 | } else {
| 17 | LI_set_level(false);
| 18 | HI_set_level(false);
| 19 | }
| 20 |
| 21 | /* The interrupt flag has to be cleared manually */
| 22 | TCA0.SINGLE.INTFLAGS = TCA_SINGLE_OVF_bm;
| 23 | }
|
Beim Compare-Interrupt ist natürlich alles umgekehrt.
Hat auch soweit alles Funktioniert. Über die Timer Period kann man die
Schaltfrequenz einstellen und über den Compare-Wert den Tastgrad.
Nun aber fingen die Probleme an, als ich begann das restliche Programm
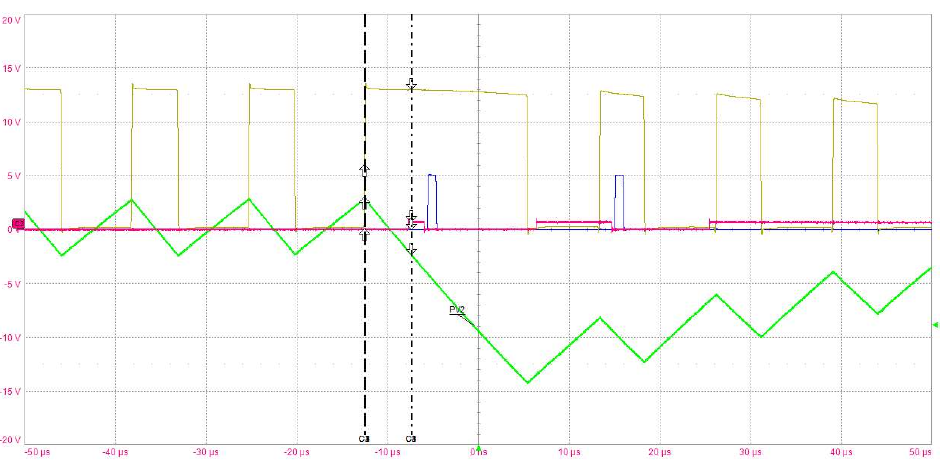
zu implementieren. Man sieht es ganz gut auf dem Bild was ich angehängt
habe.
Dort sieht man in Grün den Induktivitätsstrom und in Gelb die
geschaltete Spannung. Das pinke und das blaue Signal sind Testpins.
Diese zeigen mir an wann Registeroperationen durchgeführt werden. Pink
ist dabei der ADC und Blau alles andere (RTC und noch ein paar andere
Sachen).
Wie man sieht kommt die negative Flanke nicht. Wodurch der
Induktivitätsstrom nach unten wegrennt.
Ich weiß, dass es Operationen gibt die nicht untebrochen werden können
und es eine Gewisse Anzahl an Zyklen dauert bis der µC mit dem Interrupt
anfängt.
Aber so wie es aussieht, fällt der Interrupt einfach komplett weg und
kommt erst eine Periode später. Dazu sieht man auf dem Bild, dass in
dem moment wo der Interrupt kommen sollte, gerade der ADC aufgerufen
wird.
Ich konnte dieses Verhalten auch bei anderen Registeroperationen
beobachten.
Ursprünglich bestand das Problem auch bei der positiven-Flanke. Dies
habe ich dadurch gelöst, dass ich dem Overflow-Interrupt eine höhere
Priorität gegeben habe. (Beim ATTiny404 kann man leider nur einem
Interrupt eine höhere Priorität geben)
Dadurch komme ich auf meine Vermutung, dass Registeroperationen das
setzen der Interrupt-Flag verhindern, wenn diese eine normale
Priorisierung hat.
Meine Frage ist nun ob jemand ähnliche Erfahrungen gemacht hat, vlt eine
Literaturempfehlung für mich hat oder sogar weiß warum dies so ist. ?
Beste Grüße
Jonathan
EDIT: Was ich noch erwähnen sollte. Ich habe eine Lösung bzw. ein
Workaround gefunden. Dies hier ist also eine reine Interessenfrage, weil
mich das ganze schon sehr gewundert hat.
Jonathan B. schrieb:
> Ziel des Projekts ist es einen MPP-Tracker auf einem ATTiny404 zu
> implementieren.
>
> Ein großer Nachteil den dieser Chip hat, ist das er nicht dafür geeignet
> ist Halbbrücken anzusteuern. Der Grund ist, dass man keine Totzeit
> einstellen kann.
Darf ich fragen, warum dann nicht der ATtiny414 mit dem Timer/Counter
Type D?
Warum setzt du die Ausgänge händisch im Overflow-Interrupt? Das Ding hat
genau dazu doch PWM-Ausgänge?
Ich hätte mir den passenden PWM-Modus rausgesucht (edge- oder
centre-aligned) und im Overflow-Interrupt nur die gepufferten
compare-Register (mit Schattenregistern!) geschrieben.
Dann wäre es noch hilfreich, keinen neuen TOP-Wert zu schreiben, der
unterhalb des aktuellen counters liegt. Dann muss der Timer nämlich
einen kompletten Durchlauf des counters machen, bevor die Periodendauer
wieder stimmt. Ich denke, letzteres ist dir passiert, weil du in Prosa
erwähnst, dass man bequem die Schaltfrequenz verändern kann, dies aber
offenbar nicht synchronisiert zum Overflow gemacht wird.
Nutze doch die Hardware, wenn du sie schon gezielt auswählst.
mfg mf
Georg M. schrieb:
> Darf ich fragen, warum dann nicht der ATtiny414 mit dem Timer/Counter
> Type D?
Kurze Antwort: Weil Ich anscheinend ein Idiot bin.
Lange Antwort:
Ich hab das Projekt von einem Kommilitonen übernommen. Er die Hardware
entworfen und die Bauteile ausgesucht hat. Ich hab mich bei dem ganzen
auf seine Aussage verlassen. Hätte ich mal besser nicht gemacht
Achim M. schrieb:
> Warum setzt du die Ausgänge händisch im Overflow-Interrupt? Das Ding hat
> genau dazu doch PWM-Ausgänge?
Wie beschrieben sind diese nicht dazu geeignet eine Halbbrücke
anzusteuern.
> Ich hätte mir den passenden PWM-Modus rausgesucht (edge- oder
> centre-aligned) und im Overflow-Interrupt nur die gepufferten
> compare-Register (mit Schattenregistern!) geschrieben.
> Dann wäre es noch hilfreich, keinen neuen TOP-Wert zu schreiben, der
> unterhalb des aktuellen counters liegt. Dann muss der Timer nämlich
> einen kompletten Durchlauf des counters machen, bevor die Periodendauer
> wieder stimmt. Ich denke, letzteres ist dir passiert, weil du in Prosa
> erwähnst, dass man bequem die Schaltfrequenz verändern kann, dies aber
> offenbar nicht synchronisiert zum Overflow gemacht wird.
>
> Nutze doch die Hardware, wenn du sie schon gezielt auswählst.
Da hab ich mich missverständlich ausgedrückt. Die Schaltfrequenz wird im
laufenden Betrieb nicht verändert, sondern nur der Tastgrad.
Ja, daran hatte ich auch gedacht. Das blaue Signal in meinem Bild zeigt
die Zeitpunkte an, an dennen ein neuer TOP-Wert geschrieben wird. Man
sieht, dass die negative-Flanke davor schon hätte kommen müssen. Dadruch
war ich mir sicher das ausschliessen zu können.
Jonathan B. schrieb:
> Ein großer Nachteil den dieser Chip hat, ist das er nicht dafür geeignet
> ist Halbbrücken anzusteuern. Der Grund ist, dass man keine Totzeit
> einstellen kann.
Mit den tinyAVR0 werden sich nur sehr wenige auskennen.
Bei den standard Timern kann man sehr wohl eine Totzeit erzeugen. Dazu
nimmt man einfach 2 Compareregister und setzt sie um die Totzeit
versetzt. Der eine PWM-Ausgang wird dann invertiert benutzt.
Jonathan B. schrieb:
> Ich habe eine Lösung bzw. ein
> Workaround gefunden.
Dann macht es einen super Eindruck diese geheim zu halten.
Man möchte Hilfe, aber ist nicht bereit, auch etwas zu geben.
Jonathan B. schrieb:
> Achim M. schrieb:
>> Warum setzt du die Ausgänge händisch im Overflow-Interrupt? Das Ding hat
>> genau dazu doch PWM-Ausgänge?
>
> Wie beschrieben sind diese nicht dazu geeignet eine Halbbrücke
> anzusteuern.
Doch, geht.
Ich hätte den symmetrischen PWM-Modus(mit dem auf-und abwärts) genommen.
Es gibt zwei PWM-Ausgänge am Timer, einer wird invertiert zum anderen
eingestellt. Die Compare-Werte werden jetzt unter Berücksichtigung der
Totzeit eingestellt.
TOP wird einmal auf die Schaltfrequenz eingestellt und nicht weiter
angefasst. Wenn du Wobbeln musst, darf ein Schreiben des TOP-Wertes nur
im Overflow bei counter weit weg von TOP erfolgen.
Jonathan B. schrieb:
> Die Schaltfrequenz wird im laufenden Betrieb nicht verändert, [...] Das blaue
Signal in meinem Bild zeigt
> die Zeitpunkte an, an dennen ein neuer TOP-Wert geschrieben wird
Ja die Schaltfrequenz wird nicht verändert das glaub' ich dir. Du
hangelst dich von Schaltflanke zu Schaltflanke. Das generierst du dann
immer im Overflow-Interrupt und musst für die nächste Schaltflanke einen
neuen TOP-Wert einstellen. Das erfolgt aber nicht synchronisiert zum
Overflow.
Also wird die negative Flanke nicht ausgegeben. Das nächste
Schaltereignis ist die positive Flanke, von der man nichts sieht, da die
Ausgänge sowieso schon auf diesen Werten stehen.
Nutze die Hardware, wenn du sie schon gezielt auswählst.
mfg mf
Peter D. schrieb:
> Jonathan B. schrieb:
>> Ein großer Nachteil den dieser Chip hat, ist das er nicht dafür geeignet
>> ist Halbbrücken anzusteuern. Der Grund ist, dass man keine Totzeit
>> einstellen kann.
>
> Mit den tinyAVR0 werden sich nur sehr wenige auskennen.
> Bei den standard Timern kann man sehr wohl eine Totzeit erzeugen. Dazu
> nimmt man einfach 2 Compareregister und setzt sie um die Totzeit
> versetzt. Der eine PWM-Ausgang wird dann invertiert benutzt.
Okay, da muss ich mich wohl nochmal genauer einlesen. Aus dem Datenblatt
ging das so für mich nicht hervor.
> Jonathan B. schrieb:
>> Ich habe eine Lösung bzw. ein
>> Workaround gefunden.
>
> Dann macht es einen super Eindruck diese geheim zu halten.
> Man möchte Hilfe, aber ist nicht bereit, auch etwas zu geben.
Da hast du recht. Ich fand meinen Post nur schon etwas sehr lang.
Die Lösung die ich gefunden habe ist, dass ich alle Registeroperationen
zu definierten Zeitpunkten durchführe. Dazu habe ich einen weiteren
Timer im "Single-shot" mode hinzugefügt. Der Timer wird vom
Overflow-Interrupt über das Eventsystem angetriggert. Der Compare-Wert
für diesen Timer ist so gewählt, dass der Interrupt immer nach der
negativen Flanke kommt. Dadurch werden alle Registeroperationen in der
Zeit zwischen negativer- und positiver-Flanke durchgeführt. Dadurch wird
oben beschriebene Verhalten verhindert. Hab dazu leider kein Oszi Bild.
Ich füge das per Edit noch meinem Ursprungsposte hinzu.
EDIT: Hab gerade gelernt, dass das wohl nicht geht.
Jonathan B. schrieb:
> Die Lösung die ich gefunden habe ist, dass ich alle Registeroperationen
> zu definierten Zeitpunkten durchführe
Selbst das kann die Hardware für dich erledigen. Schattenregister!
Aber so ist das, wie in der Automobilindustrie. Nach einem Problem wird
immer mit dazugebauten Mechanismen geworfen, die dann neue Probleme
aufwerfen, nach denen mit erneut dazugebauten Mechanismen geworfen wird
usw.
Ich bin raus. mfg mf
Achim M. schrieb:
> Jonathan B. schrieb:
>> Achim M. schrieb:
>>> Warum setzt du die Ausgänge händisch im Overflow-Interrupt? Das Ding hat
>>> genau dazu doch PWM-Ausgänge?
>>
>> Wie beschrieben sind diese nicht dazu geeignet eine Halbbrücke
>> anzusteuern.
>
> Doch, geht.
> Ich hätte den symmetrischen PWM-Modus(mit dem auf-und abwärts) genommen.
> Es gibt zwei PWM-Ausgänge am Timer, einer wird invertiert zum anderen
> eingestellt. Die Compare-Werte werden jetzt unter Berücksichtigung der
> Totzeit eingestellt.
> TOP wird einmal auf die Schaltfrequenz eingestellt und nicht weiter
> angefasst. Wenn du Wobbeln musst, darf ein Schreiben des TOP-Wertes nur
> im Overflow bei counter weit weg von TOP erfolgen.
> Jonathan B. schrieb:
>> Die Schaltfrequenz wird im laufenden Betrieb nicht verändert, [...] Das blaue
> Signal in meinem Bild zeigt
>> die Zeitpunkte an, an dennen ein neuer TOP-Wert geschrieben wird
> Ja die Schaltfrequenz wird nicht verändert das glaub' ich dir. Du
> hangelst dich von Schaltflanke zu Schaltflanke. Das generierst du dann
> immer im Overflow-Interrupt und musst für die nächste Schaltflanke einen
> neuen TOP-Wert einstellen. Das erfolgt aber nicht synchronisiert zum
> Overflow.
> Also wird die negative Flanke nicht ausgegeben. Das nächste
> Schaltereignis ist die positive Flanke, von der man nichts sieht, da die
> Ausgänge sowieso schon auf diesen Werten stehen.
>
> Nutze die Hardware, wenn du sie schon gezielt auswählst.
>
> mfg mf
Ich glaube wir reden aneinander vorbei.
Grundsätzlich könnte dein Ansatz funktionieren. Ich kann ihn aber nicht
ausprobieren, da ich keinen Zugriff mehr auf die Hardware habe. (Corona
ahoi)
Den Teil wie ich meine Schaltsignale erzeuge beschreibst du allerdings
falsch.
Es gibt zwei Interrupts. Den Overflow-Interrupt und den
Compare-Interrupt.
Der Overflow Interrupt erzeugt nur die positive-Flanke.
Der Compare-Interrupt immer nur die negative-Flanke.
Ich muss also nur einen neuen Topwert einstellen, wenn ich den Tastgrad
verändern will. Wenn dieser gleich bleibt, dann muss ich gar nichts
verändern.
Wenn ich diue Hardware spezifisch asgesucht hätte, dann wäre es
aufjedenfall ein anderer Chip geworden.(z.b. der 414 der einen extra
Timer für diese Anwendung hat.)
mfg jb
Achim M. schrieb:
> Jonathan B. schrieb:
>> Die Lösung die ich gefunden habe ist, dass ich alle Registeroperationen
>> zu definierten Zeitpunkten durchführe
>
> Selbst das kann die Hardware für dich erledigen. Schattenregister!
>
> Aber so ist das, wie in der Automobilindustrie. Nach einem Problem wird
> immer mit dazugebauten Mechanismen geworfen, die dann neue Probleme
> aufwerfen, nach denen mit erneut dazugebauten Mechanismen geworfen wird
> usw.
>
> Ich bin raus. mfg mf
Grundsätzlich vlt nicht ganz falsch. In diesem Fall hat es noch andere
Probleme direkt mitgelöst. Daher war ich ganz zufrieden damit.
Danke trotzdem für deinen Input zu diesem Thema.
mfg Jb
Peter D. schrieb:
> Jonathan B. schrieb:
>> Ein großer Nachteil den dieser Chip hat, ist das er nicht dafür geeignet
>> ist Halbbrücken anzusteuern. Der Grund ist, dass man keine Totzeit
>> einstellen kann.
> Dazu nimmt man einfach 2 Compareregister und setzt sie um die Totzeit
> versetzt. Der eine PWM-Ausgang wird dann invertiert benutzt.
@Peter, was meinst Du mit der Formulierung „...um die Totzeit versetzt“?
Im PDF zum Tiny habe ich keinen direkten Bezug entdecken können.
Danke vorab für Deine Antwort.
NACHTRAG: Hab‘ es selbst gefunden, vermutlich wie in AVR447 beschrieben.
Achim M. schrieb:
> Doch, geht.
> Ich hätte den symmetrischen PWM-Modus(mit dem auf-und abwärts) genommen.
> Es gibt zwei PWM-Ausgänge am Timer, einer wird invertiert zum anderen
> eingestellt. Die Compare-Werte werden jetzt unter Berücksichtigung der
> Totzeit eingestellt.
> TOP wird einmal auf die Schaltfrequenz eingestellt und nicht weiter
> angefasst. Wenn du Wobbeln musst, darf ein Schreiben des TOP-Wertes nur
> im Overflow bei counter weit weg von TOP erfolgen.
Auch wenn du raus bist, vlt liest du es ja trotzdem noch.
Hab es ausprobiert und es funktioniert.
Danke
mfg jb
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
|