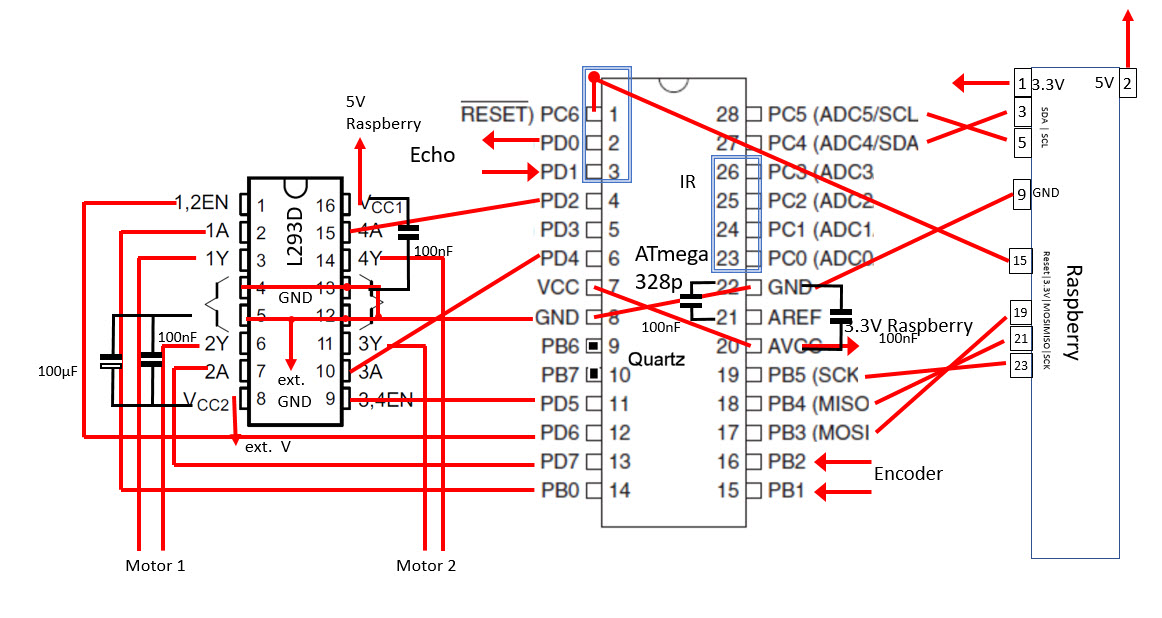
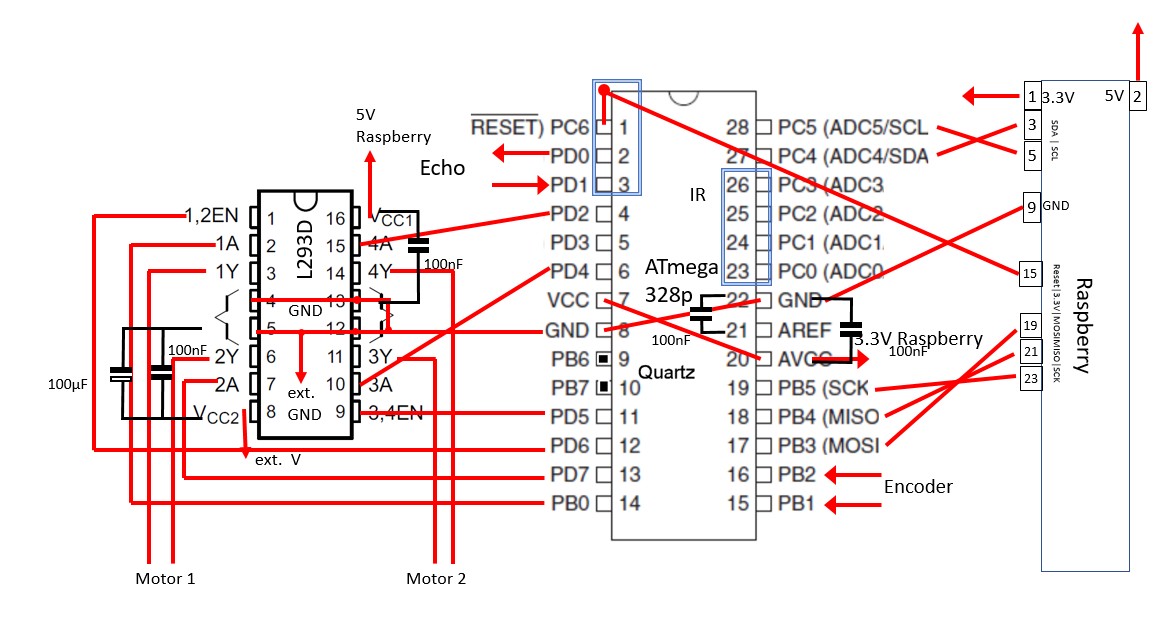
Hallo zusammen, ich möchte mit einem L293D am ATmega 328p zwei kleine 6V-DC-Motoren mit PWM steuern. Der ATmega sitzt als Shield auf einem Raspberry, der ihn mit Strom versorgt bzw. programmiert. (Randbemerkung: extrem praktisches Setup, Programmierung on-the-fly über WLAN ohne jegliches Stöpseln). Der Raspberry wird versorgt über ein USB-Ladegerät, L293D Motorstrom mit 7V über lineares Labornetzteil, GND jeweils verbunden. PWM geht vom ATmega mit jeweils 500Hz an die Enable Pins des L293D. Funktioniert auch alles ganz gut, aber mir sind am Oszilloskop deutliche Störsignale aufgefallen. Im Einzelnen 1) Obiges Setup GND und +5V/+3V zeigen jeweils ca. 200mV Störung im Takt der PWM-Frequenz, wenn die Motoren an sind. Bei abgeschalteten Motoren gibt es keine Störung. Ohne PWM bei voller Motorleistung Störung von vielleicht 100-150mV ohne messbare Frequenz 2) Gleiches Setup, aber Raspberry und Motorstrom über Akku (Powerbank) versorgt keinerlei Störung messbar 3) Wie 2) aber Motorstrom über Labornetzteil leichte Störung an GND und +5/+3V von vielleicht 50mV 4) ATmega und L293D nicht am Raspberry, sondern versorgt über Labornetzteile GND ist gestört wie bei 1) +5V/+3V zeigen dagegen keine Störung 5) L293D solo auf Breadboard, versorgt über Labornetzteile, PWM über Frequenzgenerator keinerlei Störung messbar Wie kann das sein? Ich hätte ja vermutet, dass ich eine Komponente (z.B. USB Lader) als Ursache aussortieren kann. Aber so einfach ist es ja offensichtlich nicht. Viele Grüße, Felix
Angehängte Dateien:
-

SNAG-0305.jpg
180 KB -

SNAG-0691.png
160 KB
Zeichne bitte erst mal einen Schaltplan, wo man durchblickt! Bitte keine Leitungen im Innern von Funktionsblöcken oder durch Bauelemente. Ausreichend Abblockkondensatoren wirken meist Wunder. Die bitte an allen Spannungsanschlüssen und nicht nur einmal pro Baugruppe. Und dann bitte ein Foto deines Aufbaus. Steckbrettaufbauten sind kontraproduktiv wegen großer Übergangswiderstände.
:
Bearbeitet durch User
Auf die Schnelle bekomme ich leider keinen besseren Schaltplan hin. Ich hätte gehofft, dass der Verdrahtungsplan für diese 0815 Standardschaltung reicht. Die üblichen 100nF Abblockkondensatoren sind ja auch verbaut und eingezeichnet. Zum Breadboard: Das ist ja gerade nicht kontraproduktiv, hier hat ja alles ohne jegliche Störungen funktioniert. Übrigens auch nach Entfernen der Kondensatoren.
Hi >Die üblichen 100nF Abblockkondensatoren sind ja auch verbaut und >eingezeichnet. AppNote042: For devices with multiple pairs of power and ground pins, it is essential that every pair of pins get its own decoupling capacitor. Bei dir fehlt der Kondensator zwischen PIN7 und 8. MfG Spess
Felix schrieb: > Auf die Schnelle bekomme ich leider keinen besseren Schaltplan hin. Dann nimm sie Dir. Und immer bedenken, wer hier Hilfe braucht. Ich bin es nicht.
Hast du Gnd auch schön sternförmig verlegt? Dein Punkt 1) hört sie stark nach Spannungsabfall auf der Gnd leitung an. hängt stark davon ab, wo du gemessen und verbunden hast. ein paar Bilder vom Aufbau wären nett.
Angehängte Dateien:
-

Picture1.jpg
370 KB
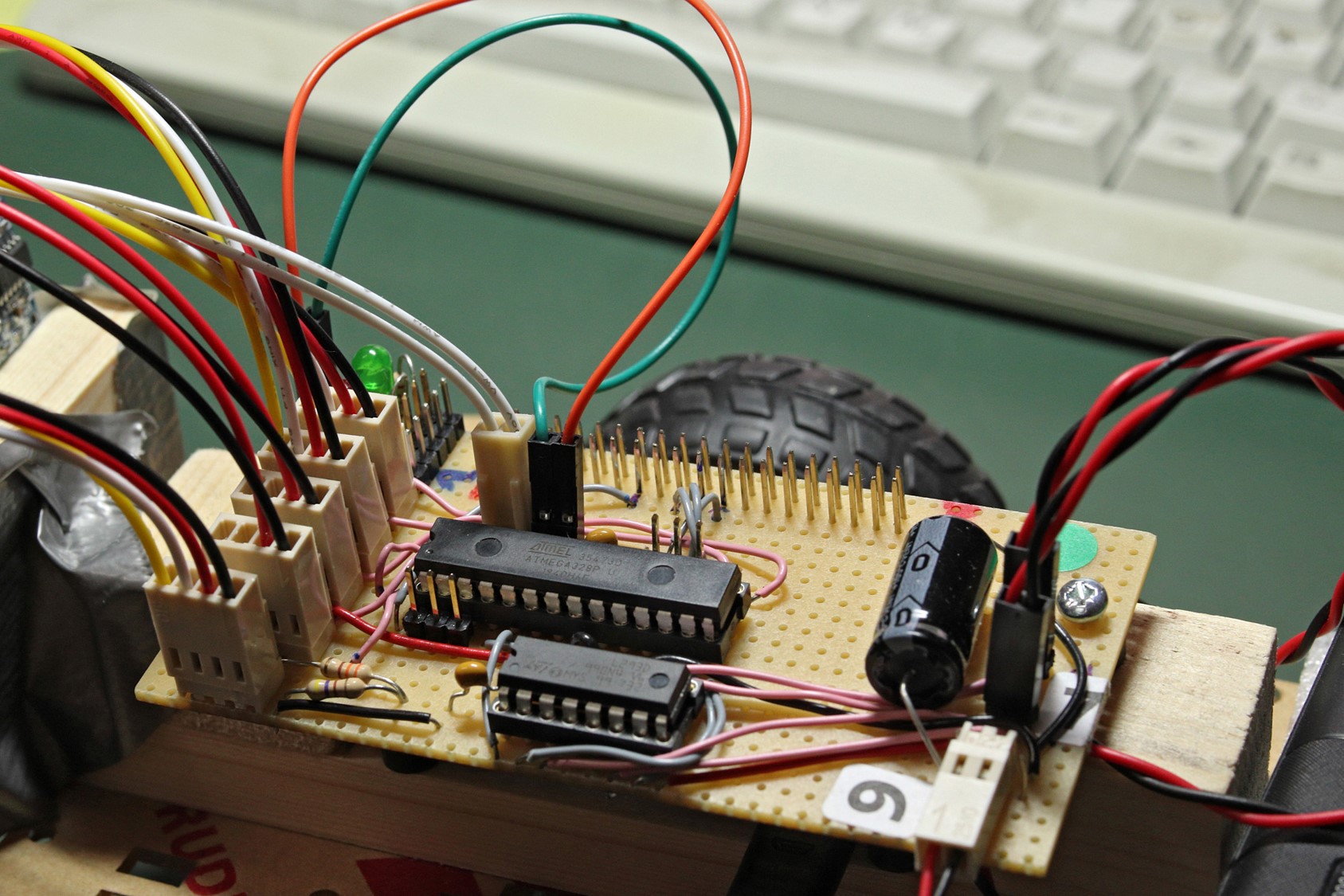
Danke für die Antworten. Insbesondere die Kondensatoren an Pin 7/8 und an den Spannungsanschlüssen werde ich nachrüsten. Ein Bild der Platine von Aufbau 1-4 habe ich angehängt. Unter der Platine hängt der Raspberry Pi, verbunden über den GPIO-Header. Motorstrom wird über Port 6 rechts vorne versorgt. Die Massenbahnen sind in der Tat eher nicht sternförmig angeordnet. Gemessen habe ich praktisch überall, die Fehlersignale sind an allen Stellen der Schaltung in gleicher Weise zu sehen (sowohl GND als auch +5V/+3V). Zu Schaltplänen: Ich verstehe, dass das in der Elektrotechnik der Standard ist. Aber in diesem konkreten Fall der Störungsanalyse müsste der Schaltplan doch auch die relevanten Teile der Netzgeräte bzw. des Raspberry Pis umfassen, oder? Schließlich gibt es mit meiner Schaltung an sich über Batterien ja keinerlei Probleme. Für diese Teile habe ich leider keinen Schaltplan, da sie dazugekauft sind. Und für das Ermitteln der fehlenden Kondensatoren hat meine Skizze ja ausgereicht. Nach dem Einbau der weiteren Kondensatoren werde ich bei meiner Fehleranalyse aber erstmal in Richtung Aufbau gehen, z.B. schlecht geplante Masseleitungen. Da werde ich mal einen alternativen Aufbau auf dem Breadboard ausprobieren. Erscheint das sinnvoll?
Felix schrieb: > Für diese Teile habe ich > leider keinen Schaltplan, da sie dazugekauft sind. Dann mache entsprechend Input/Output(Link der Teile) + deinen Schaltplan Felix schrieb: > Fehlersignale Die wie aussehen? Felix schrieb: > Aber in diesem konkreten Fall der Störungsanalyse müsste > der Schaltplan doch auch die relevanten Teile der Netzgeräte bzw. des > Raspberry Pis umfassen, oder? ja natürlich und ich habe bedenken bei dem Felix schrieb: > USB-Ladegerät Wie viel liefert der(Leistung/Volt/Ampere)? Bleibt der konstant mit oder ohne Last? Felix schrieb: > Schließlich gibt es mit meiner Schaltung > an sich über Batterien ja keinerlei Probleme. Was für Probleme treten den ohne Batterien auf außer die Störungen(Anlaufstrom berücksichtigt)? Felix schrieb: > Und für das Ermitteln der fehlenden Kondensatoren hat meine Skizze ja > ausgereicht. Wenn du dir selber den Schaltplan zeichnest fällt dir auch der ein oder andere Fehler auf. Dabei kontrollierst du ja nochmal die Schaltung und dokumentierst diese. Außerdem hätten wir dann nicht soviele Fragen um den Fehler zu finden. Bei einen kompletten Schaltplan + Layout hätte man vielleicht dir im ersten Post sagen können was verkehrt wäre. Felix schrieb: > Da werde ich mal einen alternativen Aufbau auf > dem Breadboard ausprobieren. Erscheint das sinnvoll? Helmut -. schrieb: > Steckbrettaufbauten sind kontraproduktiv wegen > großer Übergangswiderstände. Felix schrieb: > Schließlich gibt es mit meiner Schaltung > an sich über Batterien ja keinerlei Probleme. Warum dann nochmal aufbauen? Finde die Fehlerquelle. Fehlersuche
Felix schrieb: > Der Raspberry wird versorgt über ein USB-Ladegerät Nimm eine vernünftige Versorgung zur Entwicklung von elektronischen Geräten. Wenn du so ein windiges 1€-USB-Ladegerät mal aufmachst und genauer anschaust, dann freust du dich in Zukunft jedes Mal, wenn das angesteckte Gerät hinterher überhaupt noch funktioniert. Felix schrieb: > Aber in diesem konkreten Fall der Störungsanalyse müsste der Schaltplan > doch auch die relevanten Teile der Netzgeräte bzw. des Raspberry Pis > umfassen, oder? Wenn du deine eigene Versorgungsbeschaltung gut ausgelegt hast, dann ist in weitem Bereich egal, woher die Versorgung kommt. Im Zweifelsfall solltest du aber immer auf ein gutes Labornetzteil zurückgreifen können. > Für diese Teile habe ich leider keinen Schaltplan, da sie dazugekauft sind. Zumindest für den RPi lässt sich der Schaltplan aber leicht finden...
Felix schrieb: > Picture1.jpg So richtig geschickt ist das aber nicht. Der L293 ist weit weg von den Motoranschlüssen, die Motorversorgung geht quer über die Platine und die Verdrahtung ist generell zu chaotisch. Lege da anständige Versorgungsleitungen separat zu den Motoren und dem L293 und nicht so, das die Ströme quer über die ganze Platine laufen. Trenne Versorung der Motoren und des MC auf und blocke das alles ausreichend ab. Bei der Motorversorgung kann auch ein LC Filter gute Dienste tun.
Angehängte Dateien:
-

SNAG-0692.png
82 KB
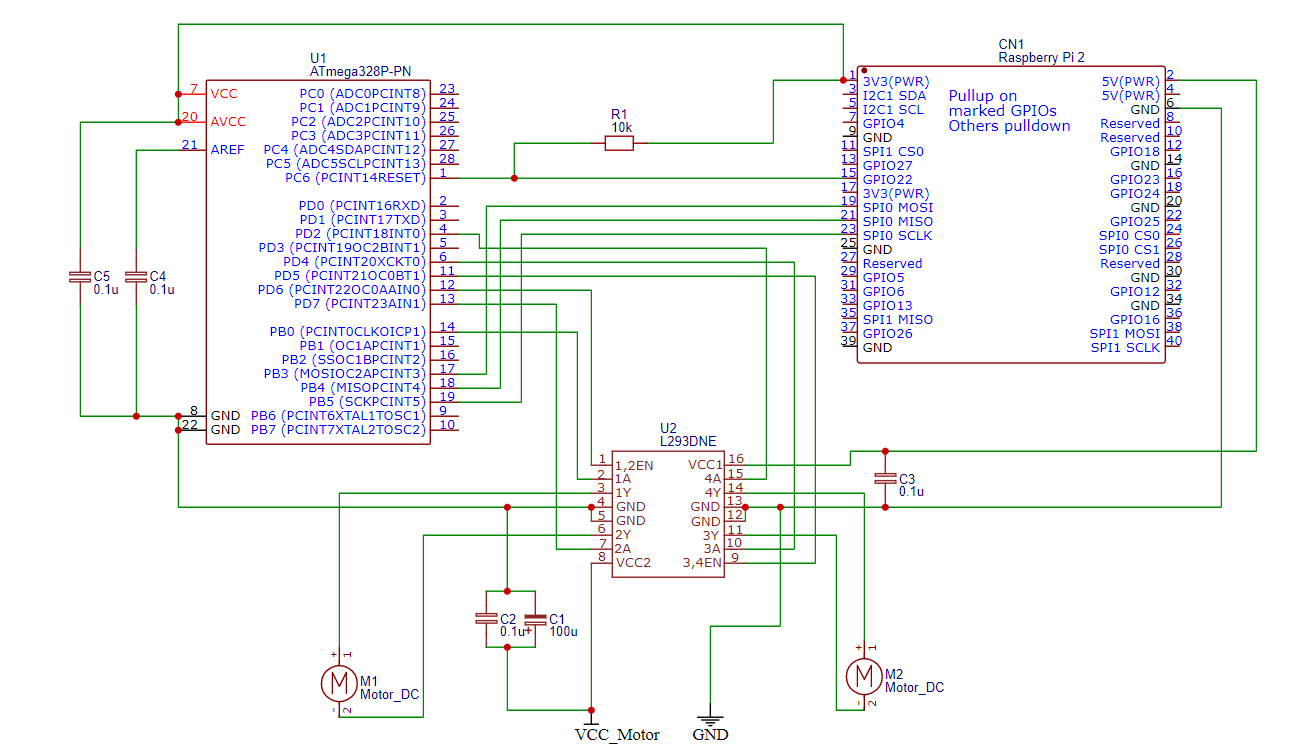
Hier der Versuch eines Schaltplanes - die bei dem Versuch oben nicht benutzten Sensoren habe ich weggelassen. Macht es das klarer? Wirkliche Fehler treten auch mit dem USB Netzteil nicht auf, nur die beschriebenen Störungen auf dem Oszilloskop. Meine Befürchtung ist, dass sich das später mit größeren Motoren in Richtung echte Fehler verstärkt. Das USB Netzteil hat 2.5A, es ist das offizielle Raspberry Netzteil. Einen Spannungseinbruch habe ich auf dem Oszi nicht gesehen, nur die Störungen. Kann aber nochmal mit dem Multimeter genauer nachmessen und auch einen Screenshot des Oszis mit den Störsignal zeigen. Aber selbst bei Versorgung mit einem Rohde&Schwarz Labornetzteil treten die Störungen in abgeschwächter Form auf (Fälle 3 und 4). Die Kritik an der Platine ist sicher berechtigt. Ich werde nach Experimentieren mit Abblockkondensatoren den Aufbau mal auf einem Breadboard in die vorgeschlagene Richtung angehen. Eine Frage zu "Trenne Versorung der Motoren und des MC auf": Im L293D sind ja GND von MC und Motoren hart miteinander verdrahtet. Gibt es irgendwelche Maßnahmen, das zu verbessern?
Felix schrieb: > Gibt es irgendwelche Maßnahmen, das zu verbessern? Die müssen schon verbunden bleiben. Aber der Motorstrom sollte mit dicken Leitungen gemacht werden (also auch GND) und möglichst kurz an den Motorversorgungsanschluss. Dabei nicht über den MC führen.
:
Bearbeitet durch User
Felix, schau doch 'mal in das Datenblatt des L293 NE (z.B. das von Texas Instruments, Abb. 8.2). Da siehst Du, dass Du den Motor mit Lösch-Dioden beschalten musst, sonst machen Dir die Spikes der Motorinduktivitäten das Leben schwer ;-). Ciao, Karl.
Karl schrieb: > Da siehst Du, dass Du den Motor mit Lösch-Dioden > beschalten musst... Hallo Karl, der hier verwendete L293D hat die schon eingebaut. Außerdem: Wäre das die Fehlerursache, dann würde ich Störsignale ja immer erwarten und nicht nur bei Variationen des Aufbaus drumherum. Viele Grüße, Felix
MISO, MOSI ist richtig rum oder Malfehler in der schematic? Hat ja nun mit dem Fehler nix zu tun, fiel mir nur auf...
Axel R. schrieb: > MISO, MOSI ist richtig rum oder Malfehler in der schematic? MISO, MOSI und SCLK werden 1:1 verbunden, nicht gekreuzt. So funktioniert es bei mir und ich meine, so ist es in der Skizze und im Schaltplan eingezeichnet. Siehst Du da irgendwo einen Fehler?
Dein Laststrom fließt über deine einzige GND verbindung zum Raspberry. Durch den Aufbau vermute ich da etwa 1-2Ohm. Da liegt dein Problem.
Flip B. schrieb: > Dein Laststrom fließt über deine einzige GND verbindung zum Raspberry. > Durch den Aufbau vermute ich da etwa 1-2Ohm. Da liegt dein Problem. Du hast zwar prinzipiell sehr Recht aber das wird dir der TO kaum glauben. Solange man keinen detaillierten Aufbau zu Gesicht bekommt bei dem man die Masse und Versorgungsleitungen klar auf- lösen kann, besteht keine Hoffnung dies nachzuweisen bzw. aufzu- zeigen. Ein Schaltplan hilft da gar nicht weiter da er fast immer den Aufbau nicht 1:1 wiedergibt. Und solch ein "Problem-Inhaber" wird immer glauben dass mit der Erstellung eines korrekten Schaltplans die Aufgabe bereits hundertprozentig erledigt ist.
jo mei schrieb: > Und solch ein "Problem-Inhaber" > wird immer glauben dass mit der Erstellung eines korrekten > Schaltplans die Aufgabe bereits hundertprozentig erledigt ist. Nö, tue ich nicht. Mir ist klar, dass das Problem nicht im tausendfach von anderen ebenfalls ausprobierten Schaltplan liegt, sondern im Aufbau. Die Masseführung ist in der Tat chaotisch und kann gut die Ursache sein. Große Ströme dürften allerdings nicht fließen, da die Motorstromversorgung +7V und Masse vom Netzteil bekommt. Mein Projekt fürs Wochenende...
Felix schrieb: > Große Ströme dürften allerdings nicht fließen, da die > Motorstromversorgung +7V und Masse vom Netzteil bekommt. "Große Ströme" sind in diesem Zusammenhang relativ da es meist um Induktionsspitzen geht die die Masse sehr kurz aber deutlich "anheben" oder anderweitig in die empfindlichen Mikrocontroller- Schaltungen einstreuen. Sobald fliegende Aufbauten mit Dupont- Verbindungs-Strippen-Chaos im Spiel sind kann man gar nichts mehr aussagen da die fliegenden Leitungen in jeder Position eine andere Wirkung haben (können). Bei Motoren können die Abblock-Elkos übrigens gar nicht groß genug ausfallen. Da muss man aber bei Schaltelementen aufpassen dass diese nicht die Last der Elkos mitschalten müssen. Flip B. schrieb: > Durch den Aufbau vermute ich da etwa 1-2Ohm Es muss auch gar nicht der ohmsche Widerstand sein der Probleme macht sondern die Längsinduktivität der stromführenden Kabel. Aber solange man keinen Aufbau kennt kann man da trefflich darüber spekulieren.
Beitrag #6550609 wurde von einem Moderator gelöscht.
Beitrag #6551029 wurde von einem Moderator gelöscht.
Beitrag #6551213 wurde von einem Moderator gelöscht.
jo mei schrieb: > Aber solange man keinen Aufbau kennt kann man da trefflich > darüber spekulieren. Blöde Frage: was fehlt denn? Es gibt den Schaltplan, eine Lageskizze und ein Foto der Platine auf dem die Bauteile und die meisten Verbindungen zu sehen sind. Die restlichen Verbindungen sind auf der Unterseite.
Angehängte Dateien:
-

IMG_6321.jpg
77 KB
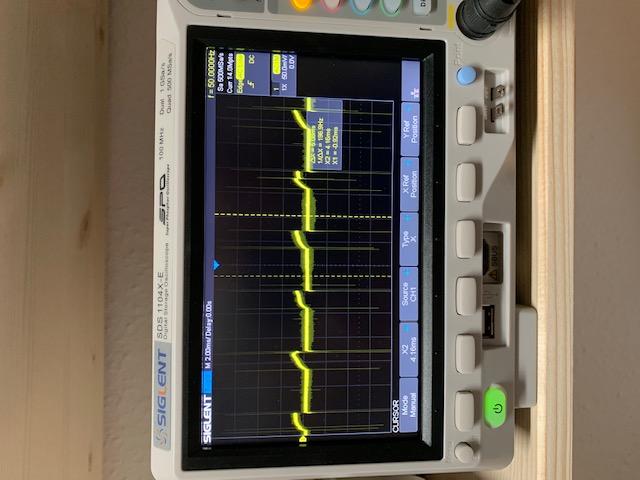
Kurzes Fazit: Ich gebe es erstmal auf. An der gezeigten Schaltung bewirken Änderungen nichts. Habe weitere 100nF Abblockkondensatoren nach ATmega-Datasheet eingelötet. Dadurch ist keinerlei Änderung festzustellen. Hinzunahme weitere Masseleitungen haben eine leichte Verbesserung ergeben, das Phänomen aber nicht gestoppt. Ein Aufbau auf dem Breadboard ist gescheitert. Die Wackelkontakte waren so heftig, dass ich den ATmega auf dem Board noch nicht mal programmieren konnte. Da lässt sich wohl keinerlei Erkenntnis gewinnen. Ich müsste ein neues Board aufbauen, wozu mir momentan die Zeit fehlt. Wenn es dazu kommt, werde ich aber die hier gegebenen Tipps gerne berücksichtigen. Top-Kandidaten sind sicher Masseführung, Spannungsstabilisierung, Trennung der Motorversorgung (auch räumlich), LC-Filter. Ansonsten hängt das Störsignal erheblich von der Konfiguration ab. Versorgung mit Batterie/Labornetzteil/USB Lader, PWM vom ATmega oder Frequenzgenerator, verwendeter Motor, PWM-Frequenz, PWM-Duty %, Messort in der Schaltung. Das sauber aufzubauen, durchzumessen und zu dokumentieren füllt ein paar Tage... Neben der Zeit ist das Problem, dass ich gar nicht weiß, welches Störsignal denn noch akzeptabel ist und welches nicht. Hier noch ein Bild der Störung (nur L293D mit Motor am Labornetzteil, PWM vom Frequenzgenerator, kein ATmega), gemessen am GND-Pin des Chips bei vielleicht 30% PWM Duty. Man sieht deutlich die Störung im 200Hz-Takt des PWM Signals und dazu hochfrequentere Störungssignale. Bei Volllast (PWM Duty 100%) bleiben letztere bestehen, die Störung im PWM-Takt verschwindet. Misst man an weiter an GND mit größerem Abstand (z.B. am Frequenzgenerator), dann schwächt sich das niederfrequente Signal sehr deutlich ab bis fast auf 0, das hochfrequente bleibt bestehen. Nimmt man den ATmega als PWM-Generator dazu, dann schaukeln sich diese Störungen hoch durchs ganze System - wenn man den ATmega mit einem Netzteil betreibt. Mit Batterien ist alles kein Problem. Vielen Dank für die ganzen Tipps!
Felix schrieb: > Blöde Frage: was fehlt denn? Felix schrieb: > Aufbau Was ist an dieser Bezeichnung so schwer zu verstehen? Wenn dir der Unterschied zwischen Schaltplan und Aufbau nicht zu vermitteln ist, wie soll man dir verständlich machen welche Masseströme oder ähnliches dir deine Schaltung stören? Ich sehe da kein Land ...
Hi, > Mit Batterien ist alles kein Problem. ömm, Batterien sind recht niederohmig. Versuche doch mal so 2200µ am L293 statt deiner 100µ. Viel Erfolg, Uwe
Beitrag #6553333 wurde von einem Moderator gelöscht.
Beitrag #6553343 wurde von einem Moderator gelöscht.
Ich würde dir empfehlen, das Board mit dem L293D extra zu bauen und mit Pfostenfeldanschlüssen Richtung MC zu versehen. Motor und Speisung auf extra Verbinder. Dann hast du ein kleines Experimentierboard, das nicht fest an einen bestimmten Controller gelötet ist. Auf das Board setzt du Abblockelko und evtl. eine Eingangsdrossel für die Versorgung und in die Ausgangsleitungen zu den Motoren nochmal kleine Drosseln (33µh - 100µH).
:
Bearbeitet durch User
Beitrag #6553909 wurde von einem Moderator gelöscht.
Beitrag #6553928 wurde von einem Moderator gelöscht.
Beitrag #6554201 wurde von einem Moderator gelöscht.
Uwe schrieb: > Versuche doch mal so 2200µ am L293 statt deiner 100µ. Leider kein Erfolg. Die Störung auf GND direkt am Chip ändert sich überhaupt nicht (siehe Foto Oszilloskop oben), ob mit 1000µ, 100m oder 0. Die Störung an Vcc2 ändert sich kaum merklich. Lässt man da aber den Elko ganz weg, dann geht die Störung dort auf über 200m-300mV hoch. Er ist also notwendig, aber 100µ sind wohl ausreichend. Matthias S >Board mit dem L293D extra zu bauen Darauf wird es in Zukunft wohl hinauslaufen. Gesteuert per I2C, brauche ich eh für diverse Sensoren. Das mit den Drosseln probiere ich auch, muss sie aber erstmal bestellen.
Beitrag #6554716 wurde von einem Moderator gelöscht.
Felix schrieb: > Gesteuert per I2C Auch das nochmal überlegen. I²C ist ein Bus, der sich durch kurze Störungen schnell mal ausser Tritt bringen lässt.
Beitrag #6555458 wurde von einem Moderator gelöscht.
Beitrag #6556064 wurde von einem Moderator gelöscht.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.