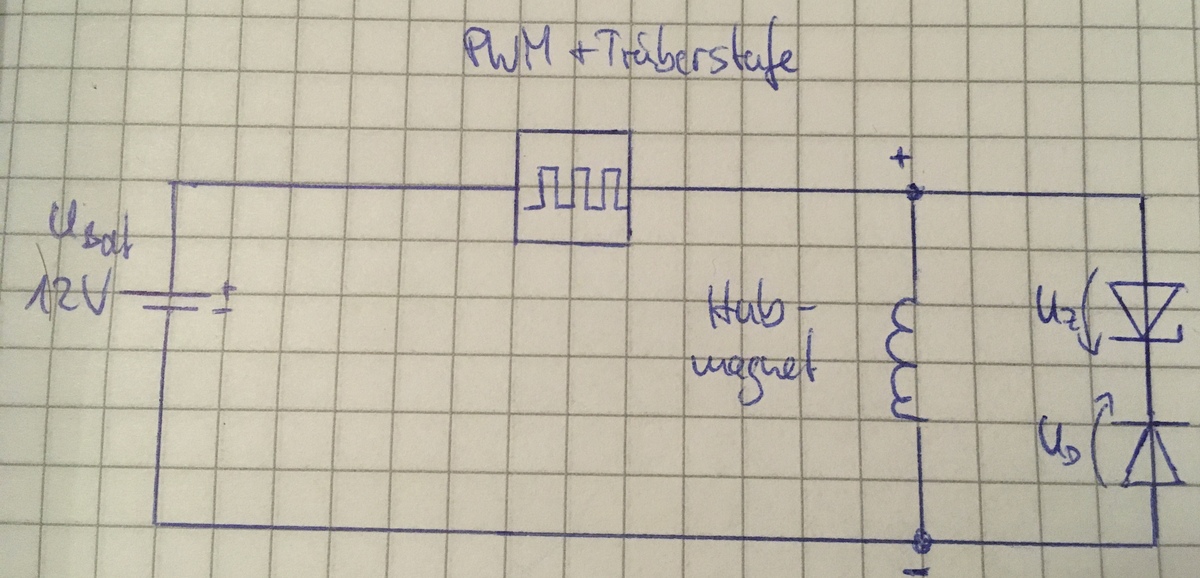
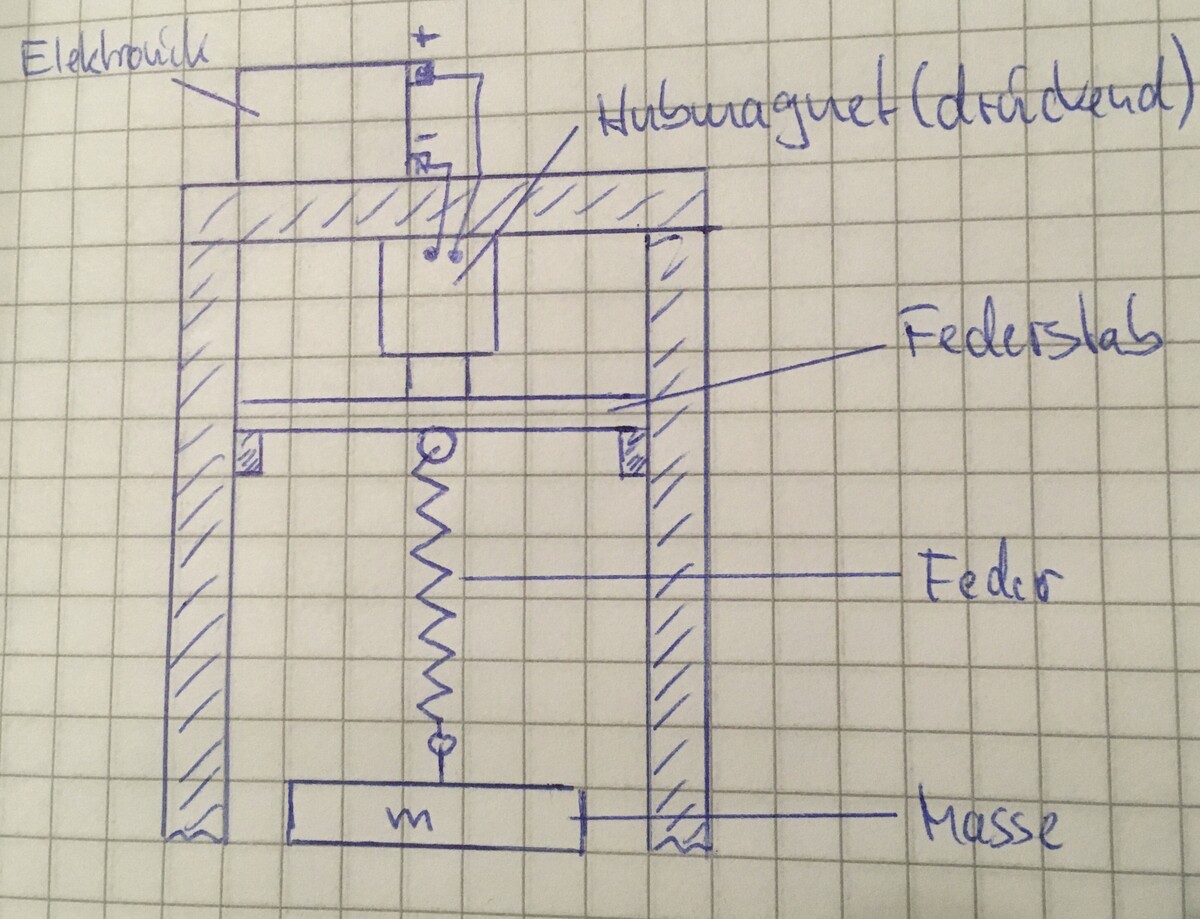
Hallo Zusammen, ich bin neu hier und habe mich schon durch ein paar ähnliche Themen durchgearbeitet. Kein Fall passt jedoch so richtig zu meinem Vorhaben. Wie der Titel es beschreibt, würde ich gerne einen fremderregten Feder-Masse-Schwinger bauen, der ein Masse von bis zu 25kg bei ca. 1Hz schwingen lässt. Meinen bisherigen Prinzipaufbau habe ich mal „skizziert“. Ich bin noch nicht sicher, ob der Entwurf mit Hubmagnet (drückend) die beste Idee ist und ob nicht eine Lösung mit DC-Motor und Exzenter besser ist. Im jetzigen Aufbau drückt der Magnet die Stange, an der der Feder-Masse-Schwinger angebracht ist, periodisch etwas nach unten um so den Impuls ins System zu bringen und den Schwinger am schwingen zu halten. Wichtig wäre mir, dass die Anregung relativ leise passiert und da habe ich einen DC-Motor erstmal nicht ins Auge gefasst. Die Anregungsfrequenz sollte so im Bereich von 0.5 bis 1.5 Hz regelbar sein. Ein Timermodul und eine Amplitudenregelung muss auch Bestandteil der Elektronischen Ansteuereinheit sein. Die Spannungsversorgung sollte über eine 12V Batterie gelöst sein und wahlweise auch über ein Netzkabel. Soweit zu meinen Überlegungen. Würde mich über eine Einschätzung eurerseits freuen. Viele Grüße 🖖
Angehängte Dateien:
Angehängte Dateien:
Den zweiten Anhang hat es leider nicht mit hinzugefügt, daher jetzt nochmal.
Erst einmal Amplitude bestimmen und dazugehörige maximale kin. Energie im "Nulldurchgang" berechnen. Daraus kannst Du dann auch die auch zwischen Feder und Masse ausgetauschte Energie und die notwendige Federkonstante N/m Auslenkung. Als weiteres müsste man dann noch die Schwinggüte des Systems kennen . Dann kommt man auf die Nm oder Ws, die bei einer Schwingung übergeben werden müssen. Und dann endlich ist man bei den Spannungs- Strom- und Leistungswerten, die man in diesem Forum verstehen kann.
Hallo Daniel, Dein Konzept ist doch in Ordnung. Ein ESP32 oder die kleineren D1Mini & Co, sollten schon genügen. PWM zum Antrieb wird auch leise sein. Letztlich wirst Du sinusförmigen Strom zum Antrieb haben. Du brauchst auch noch eine Überwachung der Auslenkung, eine Gegenkopplung. Da würde ich einen linearen Hall-Effekt-Sensor-IC nehmen und auf der schwingenden Masse einen Magneten montieren (kleben). https://sensing.honeywell.com/de-de/SS495A-S-linear-and-angle-sensor-ics https://www.reichelt.de/hallsensor-linear-analog-to-92-ss-495-a-p151339.html?search=SS495A Der Sensor wurde mal bei Heise MAKE für ein Levitationsprojekt eingesetzt. Kostet bei Reichelt 1,90€. mfg klaus
Daniel K. schrieb: > Im jetzigen Aufbau ... ... hast du 2 Federsysteme (steht sogar wörtlich in der Zeichung). Und jetzt kommt die Frage: wozu der "Federstab"? Wenn schon Hubmagnet, dann würde ich den Hub mechanisch begrenzen und die Feder direkt an den Hubmagenten hängen. Für 25kg brauchst du übrigens einen Hubmagenten mit recht ordentlich Schmackes. Ich kenne da solche Dinger, die mit 24V versorgt werden und 8A wollen. > bin noch nicht sicher, ob der Entwurf mit Hubmagnet (drückend) die beste > Idee ist und ob nicht eine Lösung mit DC-Motor und Exzenter besser ist. Nimm den Motor. Bei deratig niedrigen Frequenzen kannst du sogar einen mit Getriebe nehmen und dhinter ein Pleuel montieren, um die Drehbewegung in eine lineare Bewegung zu wandeln, dann bauchst du diesen windigen "Federstab" nicht.
Masse und Feder versuchen immer auf Resonanzfrequenz zu schwingen (z.B.: 1Hz). Wird der Hubmagnet mit 0,5 oder 1,5 Hz betrieben, ist die Amplitude der schwingenden Masse nicht mehr so groß. Es sei denn, es wird deutlich mehr Antriebsenergie aufgebracht. Das bedeutet dann u.U. auch mehr Lautstärke.
Wenn du einen „klassischen“ Aufbau machen möchtest um die Rezeptanz (Vergrößerungsfunktion bei Krafterregung) zu bestimmen, dann ist ein Hubmagnet ungünstig. Du möchtet ja ein lineares System aufbauen und somit müßtest du den Magneten harmonisch ansteuern. Besser für deinen Aufbau ist eine einfache Unwuchterregung.
Peter R. schrieb: > Erst einmal Amplitude bestimmen und dazugehörige maximale kin. Energie > im "Nulldurchgang" berechnen. > > Daraus kannst Du dann auch die auch zwischen Feder und Masse > ausgetauschte Energie und die notwendige Federkonstante N/m Auslenkung. > > Als weiteres müsste man dann noch die Schwinggüte des Systems kennen . > Dann kommt man auf die Nm oder Ws, die bei einer Schwingung übergeben > werden müssen. > > Und dann endlich ist man bei den Spannungs- Strom- und Leistungswerten, > die man in diesem Forum verstehen kann. ich wollte es bewusst erstmal pragmatisch angehen, da die Feder keine lineare Federkonstante hat. So grobe Erstversuche mit manueller Anregung haben gezeigt, dass ich nur ein paar Millimeter Auslenkung benötige und auch nur eine maximale Kraft von 25Nm.
Klaus R. schrieb: > Hallo Daniel, > Dein Konzept ist doch in Ordnung. Ein ESP32 oder die kleineren D1Mini & > Co, sollten schon genügen. PWM zum Antrieb wird auch leise sein. > Letztlich wirst Du sinusförmigen Strom zum Antrieb haben. Du brauchst > auch noch eine Überwachung der Auslenkung, eine Gegenkopplung. Da würde > ich einen linearen Hall-Effekt-Sensor-IC nehmen und auf der schwingenden > Masse einen Magneten montieren (kleben). > > https://sensing.honeywell.com/de-de/SS495A-S-linear-and-angle-sensor-ics > https://www.reichelt.de/hallsensor-linear-analog-to-92-ss-495-a-p151339.html?search=SS495A > > Der Sensor wurde mal bei Heise MAKE für ein Levitationsprojekt > eingesetzt. Kostet bei Reichelt 1,90€. > mfg klaus Danke Klaus, das klingt vielversprechend. Schaue ich mir aufjedenfall mal an.
Lothar M. schrieb: > Daniel K. schrieb: >> Im jetzigen Aufbau ... > ... hast du 2 Federsysteme (steht sogar wörtlich in der Zeichung). Und > jetzt kommt die Frage: wozu der "Federstab"? Wenn schon Hubmagnet, dann > würde ich den Hub mechanisch begrenzen und die Feder direkt an den > Hubmagenten hängen. Für 25kg brauchst du übrigens einen Hubmagenten mit > recht ordentlich Schmackes. Ich kenne da solche Dinger, die mit 24V > versorgt werden und 8A wollen. > >> bin noch nicht sicher, ob der Entwurf mit Hubmagnet (drückend) die beste >> Idee ist und ob nicht eine Lösung mit DC-Motor und Exzenter besser ist. > Nimm den Motor. Bei deratig niedrigen Frequenzen kannst du sogar einen > mit Getriebe nehmen und dhinter ein Pleuel montieren, um die > Drehbewegung in eine lineare Bewegung zu wandeln, dann bauchst du diesen > windigen "Federstab" nicht. Das mit dem Federstab ist mir beim Testaufbau an einer längeren Gardinenstange eingefallen. Natürlich wären es im Grund 2 Federn, aber da die eine Feder einseitig gedämpft und von der Frequenzlage auch weit weg von der eigentlichen Feder ist, habe ich diesen Effekt vernachlässigt und nutze vornehmlich den Halteeffekt. Dadurch muss der Aktor nicht ein riesige Leistung aufbringen, um das volle Gewicht zu bewegen. Beim Motor habe ich noch Bedenken, wegen dem Drehmoment und den Kosten. Wenn ich da das Drehmoment mit Getriebe übersetze, heißt das wieder Drehzahl erhöhen und das macht dann wieder potentiell mehr Geräusche.
Wenn die Masse aus Stahl ist, warum nicht diese Masse direkt über ein Magnetfeld anstoßen? Das würde die Mechanik wesentlich einfacher gestalten und Nebenresonanzen vermeiden. Für das Aufrechterhalten der Schwingung wird sehr wenig Kraft bzw. Energie benötigt, denn es müssen nur die Verluste kompensiert werden. Aufbau : Spule unterhalb der Masse, sodass Masse durch die Spule schwingen kann.
Angehängte Dateien:

Gerald K. schrieb: > Wenn die Masse aus Stahl ist, warum nicht diese Masse direkt über ein > Magnetfeld anstoßen? Das würde die Mechanik wesentlich einfacher > gestalten und Nebenresonanzen vermeiden. > > Für das Aufrechterhalten der Schwingung wird sehr wenig Kraft bzw. > Energie benötigt, denn es müssen nur die Verluste kompensiert werden. > > Aufbau : Spule unterhalb der Masse, sodass Masse durch die Spule > schwingen kann. Ja die Idee hatte ich auch schon, aber unterhalb der Masse etwas zu positionieren scheidet leider aus. Wenn könnte man die Windungen der Feder evtl. magnetisch anstoßen. Habe im Anhang mal den momentanen Versuchsaufbau fotografiert. Sicherlich etwas eindrücklicher als die Zeichnung.
Dann mach das mit Exzenter. Passende Getriebemotoren (60rpm) gibts für kleines Geld, für 12VDC oder 230VAC. https://www.pollin.de/p/gleichstrom-getriebemotor-tdy-12-12-v-0-18-a-60-u-min-310762 https://www.pollin.de/p/synchron-getriebemotor-tdy-230-230-v-4-w-60-u-min-310712
hinz schrieb: > Dann mach das mit Exzenter. Passende Getriebemotoren (60rpm) gibts für > kleines Geld, für 12VDC oder 230VAC. > > https://www.pollin.de/p/gleichstrom-getriebemotor-tdy-12-12-v-0-18-a-60-u-min-310762 > > https://www.pollin.de/p/synchron-getriebemotor-tdy-230-230-v-4-w-60-u-min-310712 Vielen Dank für die Links. Da sich die Masse ändern können soll, müsste ich die Drehzahl bzw. Anregungsfrequenz auch ändern können. Zudem habe ich noch keine rechte Vorstellung, wie ich bei der Exzenterlösung die Amplitude ändern könnte. Beim Hubmagneten würde ich einfach mit einem geringeren Strom ansteuern, dachte ich.
Klaus R. schrieb: > Hallo Daniel, > Dein Konzept ist doch in Ordnung. Ein ESP32 oder die kleineren D1Mini & > Co, sollten schon genügen. PWM zum Antrieb wird auch leise sein. > Letztlich wirst Du sinusförmigen Strom zum Antrieb haben. Du brauchst > auch noch eine Überwachung der Auslenkung, eine Gegenkopplung. Da würde > ich einen linearen Hall-Effekt-Sensor-IC nehmen und auf der schwingenden > Masse einen Magneten montieren (kleben). > > https://sensing.honeywell.com/de-de/SS495A-S-linear-and-angle-sensor-ics > https://www.reichelt.de/hallsensor-linear-analog-to-92-ss-495-a-p151339.html?search=SS495A > > Der Sensor wurde mal bei Heise MAKE für ein Levitationsprojekt > eingesetzt. Kostet bei Reichelt 1,90€. > mfg klaus Also günstig ist Lösung zweifellos, jedoch hatte ich eher eine rein analoge Steuerung im Kopf mit einem An/Aus Schalter für die komplette Elektronik, Einstellrädchen für Frequenz und Amplitude und eine Art Zeitschaltuhr, die die Anregung generell nach Ablauf der Zeit stoppt. Programmieren ist mir zwar durchaus nicht fremd, aber Hardwarenah bin leider selten unterwegs. Bei einer Lösung über so kleine SoC wäre dann ja noch eine GUI zu entwerfen bzw. eine App für das Smartphone. Das sprengt den Zeitrahmen für das Projekt etwas, auch wenn ich es geil fände 😊.
Daniel K. schrieb: > Ja die Idee hatte ich auch schon, aber unterhalb der Masse etwas zu > positionieren scheidet leider aus. Nicht unterhalb, sondern eine ringförmigen Spule (wie ein Schwimmreifen) um die Masse. Spulendurchmesser etwas kleiner als der Rahmen auf dem die Masse aufgehängt wird. Montage der Spule entweder oberhalb der Ruhelage (Magnetfeld zieht die Masse nach oben) oder unterhalb der Ruhelage (Magnetfeld zieht Masse nach unten) Die Kraft des Magnetfeldes muß nicht sehr stark sein, da sich die Amplitude der Auslenkung langsam aufschauckeln kann (das Magnetfeld muss die Masse nicht anheben können).
Daniel K. schrieb: > ich wollte es bewusst erstmal pragmatisch angehen, da die Feder keine > lineare Federkonstante hat. Wenn du schon vorher weißt, dass dein System nichtlinear ist, dann würde ich um so mehr auf eine streng harmonische Anregung (z.B. Unwucht) achten. Nichtlineare Vergrößerungsfunktionen sind im Allgemeinen „häßlich“ [1]. Die reale Funktion „springt“, je nachdem von welcher Seite du dich annäherst, zwischen den Ästen der Funktion. Glaubt man ein lineares System vor sich zu haben, verzweifelt man bei der Interpretation. Ein einfacher Getriebemotor mit verstellbarer Unwucht ist wirklich einfacher. [1] http://www.peil-ing.com/ingenieure/dynamik/beherrschen/nichtlinearitaet
Ein Frequenzbereich von 0.5-1Hz ergibt eine Guete von nur 2. Nicht wirklich ein Schwinger. Diese tiefe Guete errecht man mit extrem hoher Kopplung. Bedeutet, der Antrieb macht alles, dh bringt die kinetische Energie und die Auslenkung. Die Feder bringt also nichts. Wenn also dort keine Masse sein muss, kannst du die gleich weglassen und ein Stueck Holz oder Plastik an einem Pleuel verwenden.
Purzel H. schrieb: > Ein Frequenzbereich von 0.5-1Hz ergibt eine Guete von nur 2 Die Güte des Feder Masse Systems weisst du doch gar nicht. Der TO braucht die verstellbare Anregungsfrequenz doch für unterschiedliche Massen!
Purzel H. schrieb: > Ein Frequenzbereich von 0.5-1Hz ergibt eine Guete von nur 2 Wie kommst du auf eine Güte von 2? Die Güte ist doch Q=1/(2*D) wobei D das Lehrsche Dämpfungsmaß ist. Die Erregerfrequenz kommt in der Güte nicht vor.
Daniel K. schrieb: > und ob nicht eine Lösung mit DC-Motor und Exzenter besser > ist. Mach das. So hast du weniger Probleme mit der Kraft. Der Exzenter kann sehr klein sein, dann dauert es aber länger um hohe Auslenkungen zu bekommen. Andererseits demonstriert das, dass auch kleine Anregungen in der Resonanzfrequenz zu Katastrophen führen können (Brücke + Personen im Gleichschritt). Auch ist die Größe der Auslenkung direkt sichtbar und man könnte ggf. auch verschiedene Exzenter verwenden. Der antreibende Motor muss halt geeignet untersetzt werden. Ich vermute das soll eine Demonstration für Resonanz sein.
Die Dämpfung des Systems zu messen wäre wohl der erste Schritt. Mit der Hand auslenken und mit Stoppuhr(Äpp) die Zeit bis zur halben Auslengung messen. Dann kann man schon mal genauer Abschätzen welche Energie für welche Amplitude eingekoppelt werden muss. Anregung über Magnet(strom) hat den Vorteil, dass man die Anregungsamplitude auch noch einstellen kann. Beim Exenter die Amplitude zu variieren ist deutlich mehr Mechanik :) Dein System hat aber mehr als einen Freiheitsgrad es wird auch pendeln..
Zunächst möchte ich mich bedanken für das viele Feedback 🙂. Mittlerweile bin ich auch eher von der Motor-Lösung überzeugt, da ich so eine kontrollierbare Anregung erhalte und nicht einen recht undefinierten Impuls. Wenn man das ganze wirklich mal manuell anregt und versucht halt einigermaßen periodisch anzuregen, wird der Resonanzeffekt sehr deutlich. Man benötigt wirklich nur recht wenig Energie, um die minimale Schwingungsdämpfung zu kompensieren und den Schwinger am schwingen zu halten. Die Abschätzung der Federkonstante ergab doch einen relativ linearen Verlauf, solange man >2kg dranhängt. Meine Idee, den Impuls an der Aufhängung einzuleiten würde ich immer noch favorisieren. Die Drückbewegung würde ich versuchen über einen Nocken herzustellen. Bei einer Unwuchtanregung, bräuchte ich vermutlich eine sehr hohe Masse bzw. Radius bei so einer niedrigen Drehzahl (<100rpm) ? Die Anregung über ein Spule herzustellen, bei der ein Teil in der Aufhängung als Eisenkern funktioniert, finde ich am elegantesten. Allerdings müsste ich diese Anregung in den beweglichen Teil, unterhalb der Feder, einbauen. Dafür bräuchte ich jedoch einen Wegausgleich bzw. könnte ich auch versuchen die Spule um die Feder zu positionieren 🤔. Ihr seht, ich bin noch unentschlossen 🙂.
Die Guete = Frequenz/Bandbreite, also 0.75/0.5 = 1.5 .. Sorry falsch gelesen .. Frequenz=1, Bandbreite=1 : Guete=1.0/(1.5-0.5) = 1 Eine Guete von 1. Egal, wir hoch die freischwingende Guete ist, muss die runterkommen auf 1, und das macht man durch die Kopplung. Und die Resonanzueberhoehung ist Wurzel Q. Also auch nichts. Dann kann man gleich einen Pleuel(Stange) nehmen.
Daniel K. schrieb: > Ihr seht, ich bin noch unentschlossen 🙂. Dann schreib doch, warum du das machen willst.
von Purzel H. schrieb:
>Die Guete ist die Frequenz/Bandbreite, also genauer 0.75/0.5 = 1.5
Deine Rechnung, eine Güte von nur 1.5 ist Unsinn.
Woher hast du die Bandbreite 0.5? Die Konstruktion hat
eine sehr hohe Güte weil es kaum Verluste gibt. Es gibt
kaum Reibung und die Luftverdrängungsreibung bei dieser
niedrigen Frequenz ist auch sehr sehr gering.
Ich schätze mal eine Güte von mindestens 100, wenn nicht
mehr.
Ich würde eine große Zylinderspule bauen, wo die gesamte
25kg Masse eintaucht, dann fallen die ganzen mechanischen
Probleme weg. Wegen der hohen Güte ist nur sehr wenig
Antriebsleistung nötig um das Ding zum Schwingen zu bringen.
Man sieht das zum Beispiel bei Uhrpendel wie wenig
Antriebsleistung da nötig ist.
Der Poster will eine Bandbreite von 1Hz bei 1Hz Centerfrequenz, durchstimmbar von 0.5 - 1.5Hz. Und diese Bandbreite kann er nur mit einer Guete von 1 anregen. Mit einer mechanischen Gute von 100 gibt's bei 1Hz Centerfrequenz leider nur 10mHz Bandbreite, weiter weg gibt's keine Amplitude mehr. Man kann natuerlich auch die Masse veraendern, zB Wasser einfuellen, oder absaugen...
Purzel H. schrieb: > Die Guete = Frequenz/Bandbreite, Du verwechselt die Erregerbandbreite mit der Bandbreite des homogenen Systems. Sie sind beide unabhängig voneinander.
Richtig. Ich ging von einer durchstimmbaren Bandbreite des gesammten Systems aus. Aber. Wozu wollte man eine Erregerbandbreite von 1Hz, wenn ausserhalb von 10mHz nichts geschieht ? Wenn die Frequenz (etwa) fest sein sollte, genuegt ein AFC/PLL welcher auf maximale Amplitude regelt. Denn wenn die Frequenz per Quarz fest ist, laeuft die Amplitude weg. Allenfalls sollte der Poster berichten, was das Ganze soll.
von Daniel K. schrieb: >Die Anregungsfrequenz sollte so im Bereich von 0.5 bis 1.5 Hz regelbar >sein. von Purzel H. schrieb: >Der Poster will eine Bandbreite von 1Hz Der Poster will eine durchstimmbare Frequenz von 0.5 bis 1.5Hz bauen um irgendwo den Resonanzpunkt zu finden, daß er eine Bandbreite von 1Hz wünscht hat er nicht geschrieben.
Zum Thema : https://de.m.wikipedia.org/wiki/Federpendel
F ist die notwendige Kraft um die Lage der Masse m um den Weg y zu verändern. Die Masse der Feder muss gegenüber der Pendelmasse zu vernachlässigen sein.
Hier wird die Güte von 1 ... 100 geschätzt - das ist geraten! Keine Ahnung warum die Güte hier eine Rolle spielt, sie läßt sich ziemlich exakt messen: ein Feder-Masse-System entspricht physikalisch einem Schwingkreis aus Kondensator und Spule, die Formeln für Resonanz, Güte, usw. sind äquivalent. Am Oszilloskop schaut man sich die abklingende Schwingung an und kann daraus (neben der Resonanzfrequenz) die Güte abschätzen: Anzahl der (kompletten) Schwingungen bis die Amplitude auf die Hälfte gesunken ist x 5 = Güte Q. Q ~ 5 x (A0-A0,5) Hier wird die Methode beschrieben: https://www.elektroniktutor.de/analogtechnik/par_swkr.html - läßt sich ebensogut an einem Feder-Masse-System anwenden.
Also um hier mal das Geheimnis zu lüften, was der ganze Aufbau soll: Der Plan ist, das ganze für eine Kleinkind-Federwiege zu benutzen. Ein Freund von mir, der bald Vater wird, hat mich auf die Idee gebracht und ich will ihn nun damit unterstützen. Es gibt so etwas natürlich auch schon käuflich zu erwerben, aber natürlich teilweise zu Wucherpreisen und für mich unbefriedigender Umsetzung. Zudem habe ich keine Lust auf billige Chinaware und bin generell an DIY-Lösungen interessiert, wo ich etwas dazulerne. Infolge der Gewichtserhöhung über einen längeren Zeitraum, muss die Anregungsfrequenz auch anpassbar sein, da die Resonanzfrequenz des Schwingers sich natürlich nach unten verschiebt (k_Feder/m_Kind). Zielfrequenz laut Hersteller der Feder liegt so zw. 60...70 Schwingungen pro Minute also um 1Hz herum.
Mohandes H. schrieb: > Hier wird die Güte von 1 ... 100 geschätzt - das ist geraten! Der Gütefaktor von einer Pendeluhr liegt bei 10000. Quelle : https://de.m.wikipedia.org/wiki/G%C3%BCtefaktor#Mechanischer%20Schwingkreis Die Güte kann man über die Bandbreite ermitteln.
Wird das Federpendel fremderregt, dann misst man die Auslenkung bei der Resonanzfrequenz. Anschließend verstimmt man die Erregungsfrequenz so weit, dass die Auslenkung um 30% kleiner wird. Die Frequenzabweichung x 2 ergibt die Bandbreite. Daraus lässt sich der Gütefaktor berechnen.
Gerald K. schrieb: > Wird das Federpendel fremderregt, dann misst man die Auslenkung bei der > Resonanzfrequenz. Anschließend verstimmt man die Erregungsfrequenz so > weit, dass die Auslenkung um 30% kleiner wird. Die Frequenzabweichung x > 2 ergibt die Bandbreite. Daraus lässt sich der Gütefaktor berechnen. Ja, auch mit dieser Methode geht es - hier auch analog zum elektrischen Schwingkreis. Mein Einwand ('Güte geraten') war nur weil oben Zahlen von 1 bis 100 in den Raum geworfen wurden, ohne Beleg. Gerald K. schrieb: > Der Gütefaktor von einer Pendeluhr liegt bei 10000. Das wußte ich nicht, daß die Güte einer Pendeluhr so hoch ist, interessant! Bei Schwingkreisen im KW-Bereich sind ja schon Güten >100 nicht schlecht. Daniel K. schrieb: > Der Plan ist, das ganze für eine Kleinkind-Federwiege zu benutzen. Wobei die Güte für dieses Projekt ja eher uninteressant ist.
Mohandes H. schrieb: > Das wußte ich nicht, daß die Güte einer Pendeluhr so hoch ist, > interessant! Bei Schwingkreisen im KW-Bereich sind ja schon Güten >100 > nicht schlecht. In der Mechanik sind die Gütefaktoren sehr hoch. Siehe z.B. Quarz. Viele mechaniche Gebilde können in Resonanz kaput gehen. Man denke nur an das Glas, dass in Eigenresonanz gebracht zerspringt oder die Brücke, die beim Marsch im Gleichschritt einstürzt. Tesla hat sehr viel in dieser Richtung experimentiert. Kleine Wirkungen können sich stark aufsummieren bzw. aufschaukeln. Mohandes H. schrieb: > Daniel K. schrieb: >> Der Plan ist, das ganze für eine Kleinkind-Federwiege zu benutzen. > > Wobei die Güte für dieses Projekt ja eher uninteressant ist Für das Projekt reicht es die statische Auslenkung zu messen. Siehe : https://de.m.wikipedia.org/wiki/Federwaage
Daniel K. schrieb: > Zudem habe ich keine Lust auf billige Chinaware und bin generell an > DIY-Lösungen interessiert, wo ich etwas dazulerne. Schön! :-) > Zielfrequenz laut Hersteller der Feder liegt so zw. 60...70 Schwingungen > pro Minute also um 1Hz herum. Das Schaukelbettchen wird aber keine Resonanz bei 1 Hz haben, das Kleinkind ist auch bestimmt froh drüber. Die Feder dient nur als Speicher, ihre Resonanzfrequenz ist egal.
Wäre doch eine gute Produktidee : Schaukelpferd mit Gewichtsmessung. Es müßte doch die Schauckelgeschwindigkeit vom Gewicht abhängen, oder?
Nick M. schrieb: > Daniel K. schrieb: >> Zudem habe ich keine Lust auf billige Chinaware und bin generell an >> DIY-Lösungen interessiert, wo ich etwas dazulerne. > > Schön! :-) > >> Zielfrequenz laut Hersteller der Feder liegt so zw. 60...70 Schwingungen >> pro Minute also um 1Hz herum. > > Das Schaukelbettchen wird aber keine Resonanz bei 1 Hz haben, das > Kleinkind ist auch bestimmt froh drüber. > > Die Feder dient nur als Speicher, ihre Resonanzfrequenz ist egal. Ja das war jetzt etwas ungenau formuliert. Wenn man nach der Schwingfrequenz von solchen Federwiegen recherchiert, sollte diese so im Bereich von 0.8-1.2 Hz liegen, damit das Kindchen seelig einschläft. Die Feder auf dem Bild oben ist also genau auf diesen Bereich ausgelegt. Natürlich will ich nicht ständig genau bei der Resonanz der Feder anregen, aber zumindest in der Nähe, sodass ich wenig Anregungsenergie benötige. Die Feder speichert auch gut Energie, sodass man evtl. gar nicht nach jeder Periode anregen müsste sondern immer alle 2. - Was haltet ihr denn von der Idee, die Stahlfeder als Eisenkern zu nutzen und mit einer Ringspule kurzzeitig ein Magnetfeld und damit eine Kraft auf die Feder auszuüben. Ich habe keine Ahnung, ob das durch die Windungen der Feder überhaupt funktioniert aber spukt mir so im Kopf rum.
Gerald K. schrieb: > Wäre doch eine gute Produktidee : Schaukelpferd mit Gewichtsmessung. > Es müßte doch die Schauckelgeschwindigkeit vom Gewicht abhängen, oder? solange man die genaue Kennlinie der Feder gemessen hat, könnte man so natürlich über die gemessene Auslenkung auf das Gewicht rückschließen. Oder man zeichnet die Auslenkung über der Zeit auf und geht dann rückwärts in die Formel für die Schwingfrequenz. Würde dann einen kleinen Regelkreis ergeben.
Daniel K. schrieb: > Was haltet ihr denn von der Idee, die Stahlfeder als Eisenkern zu nutzen > und mit einer Ringspule kurzzeitig ein Magnetfeld und damit eine Kraft > auf die Feder auszuüben. Wenn die Resonanzfrequenz genau bekannt ist (ist sie ja bei dir), kann man natürlich die pro Periode dissipierte Energie einfach wieder zuführen (vorausgesetzt man hat das System einmal angeregt). Da könnte durchaus elektromagnetisch erfolgen. Die Regelung kann auch wunderbar über einen Hallsensor eingreifen. Solche „Kinderspielzeuge“ sind ja als endloses Pendel hinreichend bekannt.
Gerald K. schrieb: > Wäre doch eine gute Produktidee : Schaukelpferd mit > Gewichtsmessung. > Es müßte doch die Schauckelgeschwindigkeit vom Gewicht abhängen, oder? Nö! Das Gewicht spielt keine Rolle. Woher weiß ich das? Ganz einfach. Ich, ca 150 kg schwer und mein Kind, ca 20 kg schwer waren auf einem Spielplatz und haben geschaukelt. Seltsamer Weise waren wir immer synchron unterwegs!
Gerald K. schrieb: > Wäre doch eine gute Produktidee : Schaukelpferd mit > Gewichtsmessung. > Es müßte doch die Schauckelgeschwindigkeit vom Gewicht abhängen, oder? Wenn eine Rückstellfeder dabei ist: Auch, aber da die Bewegung nicht rein linear ist, sondern Rotation dabei ist, ebenso von der Gewichtsverteilung. MfG, Arno
Arno schrieb: > Wenn eine Rückstellfeder dabei ist Ich meinte so etwas : https://royaldesign.com/at/schaukelpferd ohne Feder.
Gerald K. schrieb: > Arno schrieb: >> Wenn eine Rückstellfeder dabei ist > > Ich meinte so etwas : > > https://royaldesign.com/at/schaukelpferd > > ohne Feder. Dann nicht. Das ist physikalisch betrachtet ein einfaches Pendel, bei dem hängt die Resonanzfrequenz nicht von der Masse ab. Und zwar, weil nicht nur die Trägheit, sondern auch die Rückstellkraft (Gewichtskraft) linear von der Masse abhängen, sie kürzt sich bei der Bestimmung der Resonanzfrequenz also raus. MfG, Arno
Eine gewickelte Feder ist ungeeignet fuer das Projekt, weil sie zu einer Rotation fuehrt. Besser ein Gummiband verwenden.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.