Hi, Der elektrische Winkel muss ja für die Feldorientierte Regelung so gewählt werden, dass der Motor in beide Richtungen gleich schnell dreht. Nun gibt es aber auch einen elektrischen Winkel, der das Drehmoment optimiert und dieser ist meist leicht ein paar Grad verschoben. Ich habe das mal an einem BLDC Motor getestet, wobei beim optimalen Drehmomentwinkel, der Motor in beide Richtungen in etwa 40% mehr Drehmoment hatte als beim Winkel, wo der Motor in beide Richtungen gleich schnell dreht. Der Id Strom bliebt bei beiden Winkeln beim Drehmomenttest um die 0A, daher kann kein zusätzlicher Id Strom für das erhöhte Drehmoment verantwortlich sein. Jemand eine Idee, welchen Winkel man nehmen sollte? Für meine Applikation brauche ich maximales Drehmoment.
Bert S. schrieb: > Der Id Strom bliebt bei beiden Winkeln beim Drehmomenttest um die 0A, > daher kann kein zusätzlicher Id Strom für das erhöhte Drehmoment > verantwortlich sein. Oh, eigentlich schon. Denn du hast am den elektrischen Winkel rumgespielt. Wenn du deinen eingeprägten Strom mit dem nullzentrierten elektrischen Winkel rücktransformierst, ist plötzlich eine D-Komponente da. Leuchtet ein, oder? Was du da entdeckt hast, ist im Ankerstellbereich das Reluktanzmoment mit zu nutzen. Das geht sehr wohl mit D-Strom. Nicht zu verwechseln mit dem D-Strom, der in der Feldschwächung benutzt wird. Schau dir dazu am besten mal die MTPA-Methode (maximum torque per amps) an. Mit der kannst du für gegebenes n, gegebenes U_ZK und gefordertes M ein optimales D-Q-Strompaar berechnen. Zusätzlich kann es sein, dass dein Motor keine Sinus-BEMF hat ("Kamelhöcker") und deswegen mit Oberwellenmodulation und/oder Verdrehung der optimalen Richtung des Teilstroms fürs Reluktanz-Moment ein wenig mehr Drehmoment bringt. mfg mf PS. Für eine U_ZK_Auslegung kann man sich eine D-Q-Strompaar-Tabelle für M und n vorberechnen. n für den Tabellen-Lookup muss dann noch mit U_ZK_gemessen und eventuell der Temperatur kompensiert werden.
:
Bearbeitet durch User
Angehängte Dateien:
-

MTPA.png
30 KB
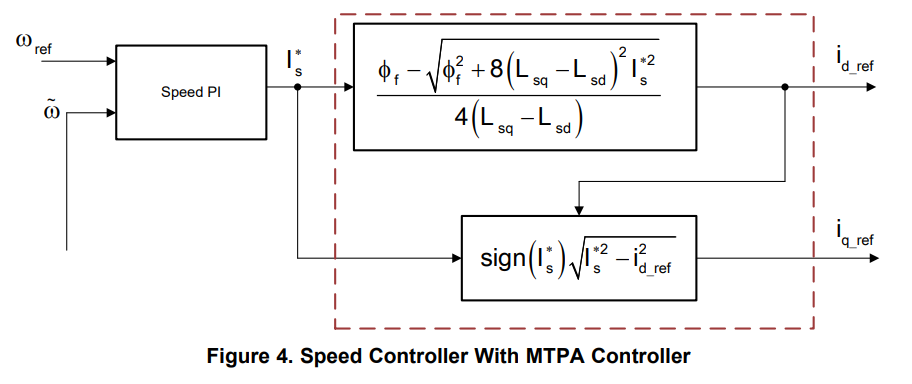
Danke dir, dass mit MTPA klingt interessant und ich habe mich schon einmal ein wenig eingelesen. Das Problem ist nur, ich verstehe nicht ganz, wie ich auf
komme. Phi_f sollte ja eigentlich der Fluss sein, also direkt die back EMF Konstante. Wie genau kann ich aber L_sq und L_sd berechnen? Die sind doch bei einem PMSM gleich?
Bert S. schrieb: > L_sq und L_sd berechnen? Die sind doch bei einem PMSM gleich? Ne, sind nicht unbedingt gleich. Hast du ein Datenblatt von deinem Motor? Da müsste zumindest das eigentlich drin stehen. Hat dein Motor Magnete auf oder sehr nahe der Oberfläche oder versenkte Magnete? Abhängig von der Geometrie: In D-Richtung liegen Trafoblech, Luftspalt und Magnete im magnetischen Schaltkreis. NdFeB hat hier ein μ_r von "nahezu Luft". In Q-Richtung liegen Trafoblech und Luftspalt im magnetischen Schaltkreis. Daher der Unterschied zwischen Ld und Lq. Notfalls kann man Ld und Lq auch rausmessen. Dazu muss der Rotor aber in geeigneter Lage stehen. mfg mf
:
Bearbeitet durch User
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.